
一种基于旋转点胶装置的视觉定位纠偏方法.pdf

邻家****曼玉


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于旋转点胶装置的视觉定位纠偏方法.pdf
本发明为一种基于旋转点胶装置的视觉定位纠偏方法,包括以下步骤:步骤S1.标定旋转轴阀阀中心和相机的中心的相对位置关系;步骤S2.根据步骤S1.标定的相对位置关系进行相机和点胶阀的点胶点的坐标转换;步骤S3.根据点胶阀与产品的位置关系进行视觉定位纠偏;本算法适用于点胶针阀和喷射阀。通过本算法可以实现对喷射阀或点胶针阀的角度纠偏,且在提高了点胶针阀示教的精度,同时还能实现对喷射阀的示教。
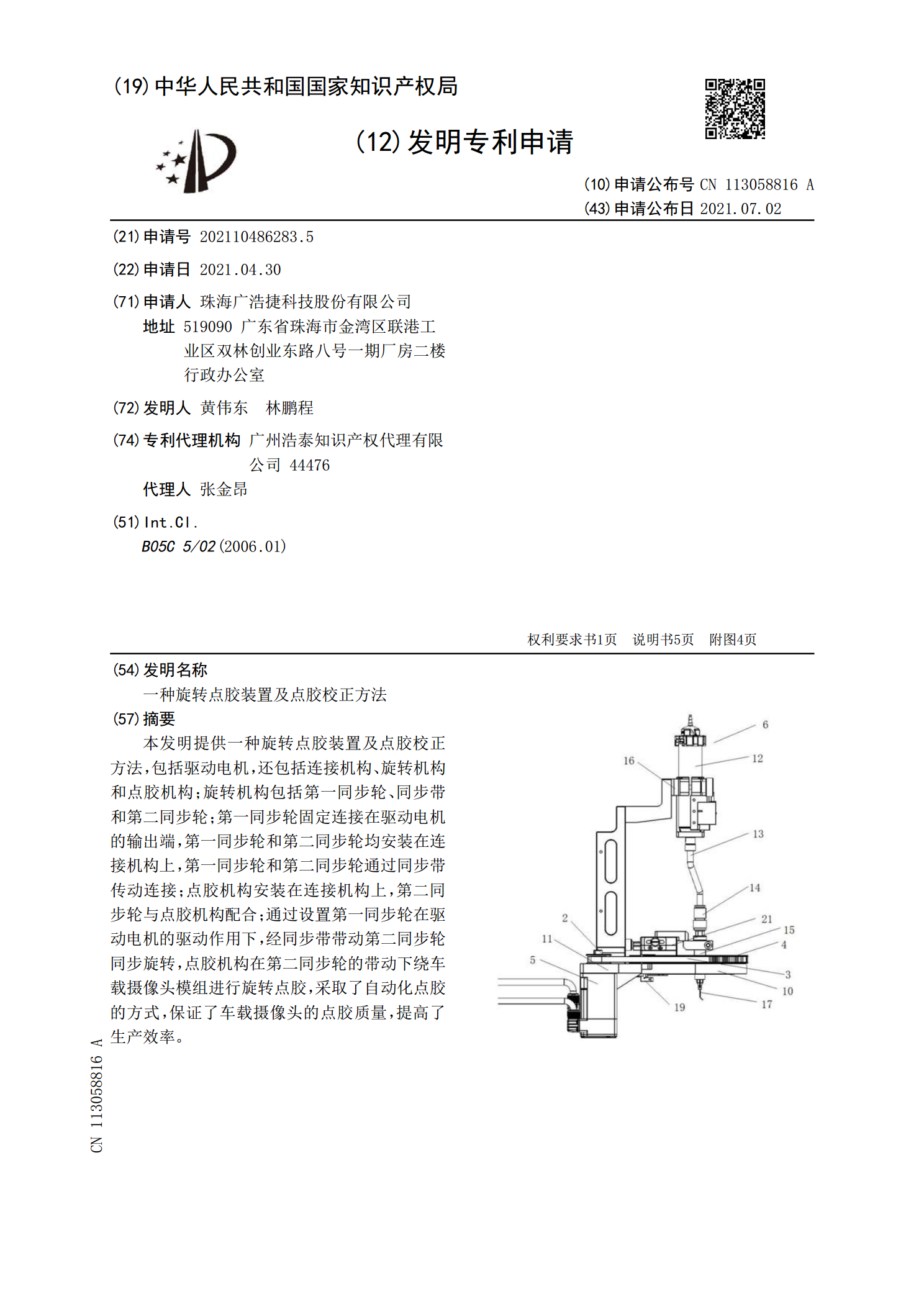
一种旋转点胶装置及点胶校正方法.pdf
本发明提供一种旋转点胶装置及点胶校正方法,包括驱动电机,还包括连接机构、旋转机构和点胶机构;旋转机构包括第一同步轮、同步带和第二同步轮;第一同步轮固定连接在驱动电机的输出端,第一同步轮和第二同步轮均安装在连接机构上,第一同步轮和第二同步轮通过同步带传动连接;点胶机构安装在连接机构上,第二同步轮与点胶机构配合;通过设置第一同步轮在驱动电机的驱动作用下,经同步带带动第二同步轮同步旋转,点胶机构在第二同步轮的带动下绕车载摄像头模组进行旋转点胶,采取了自动化点胶的方式,保证了车载摄像头的点胶质量,提高了生产效率。
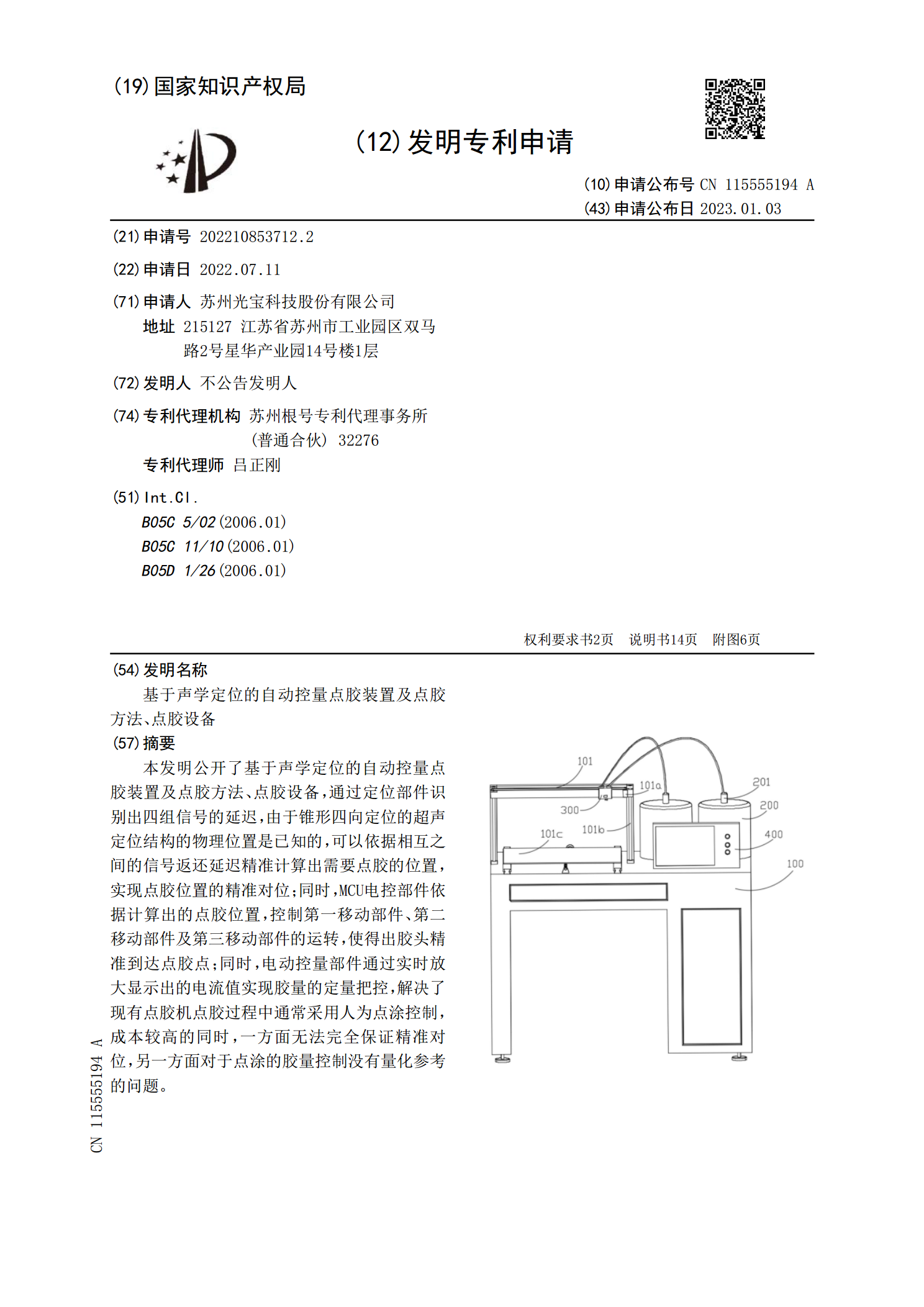
基于声学定位的自动控量点胶装置及点胶方法、点胶设备.pdf
本发明公开了基于声学定位的自动控量点胶装置及点胶方法、点胶设备,通过定位部件识别出四组信号的延迟,由于锥形四向定位的超声定位结构的物理位置是已知的,可以依据相互之间的信号返还延迟精准计算出需要点胶的位置,实现点胶位置的精准对位;同时,MCU电控部件依据计算出的点胶位置,控制第一移动部件、第二移动部件及第三移动部件的运转,使得出胶头精准到达点胶点;同时,电动控量部件通过实时放大显示出的电流值实现胶量的定量把控,解决了现有点胶机点胶过程中通常采用人为点涂控制,成本较高的同时,一方面无法完全保证精准对位,另一方
基于声学定位的自动控量点胶装置及点胶方法、点胶设备.pdf
本发明公开了基于声学定位的自动控量点胶装置及点胶方法、点胶设备,通过定位部件识别出四组信号的延迟,由于锥形四向定位的超声定位结构的物理位置是已知的,可以依据相互之间的信号返还延迟精准计算出需要点胶的位置,实现点胶位置的精准对位;同时,MCU电控部件依据计算出的点胶位置,控制第一移动部件、第二移动部件及第三移动部件的运转,使得出胶头精准到达点胶点;同时,电动控量部件通过实时放大显示出的电流值实现胶量的定量把控,解决了现有点胶机点胶过程中通常采用人为点涂控制,成本较高的同时,一方面无法完全保证精准对位,另一方
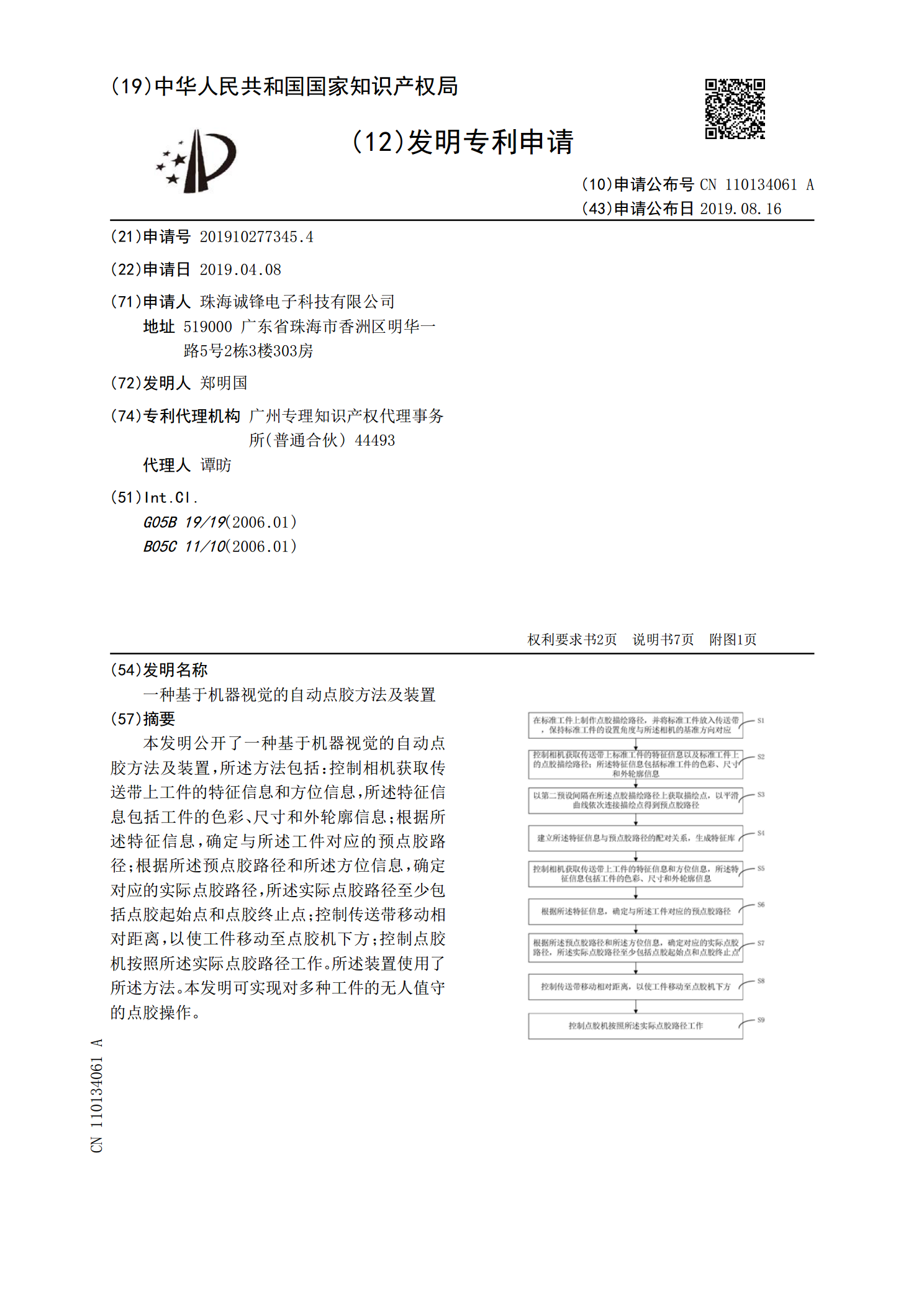
一种基于机器视觉的自动点胶方法及装置.pdf
本发明公开了一种基于机器视觉的自动点胶方法及装置,所述方法包括:控制相机获取传送带上工件的特征信息和方位信息,所述特征信息包括工件的色彩、尺寸和外轮廓信息;根据所述特征信息,确定与所述工件对应的预点胶路径;根据所述预点胶路径和所述方位信息,确定对应的实际点胶路径,所述实际点胶路径至少包括点胶起始点和点胶终止点;控制传送带移动相对距离,以使工件移动至点胶机下方;控制点胶机按照所述实际点胶路径工作。所述装置使用了所述方法。本发明可实现对多种工件的无人值守的点胶操作。