
运动控制方法、装置、机器人及存储介质.pdf

飞舟****文章

1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人运动控制方法、装置及存储介质.pdf
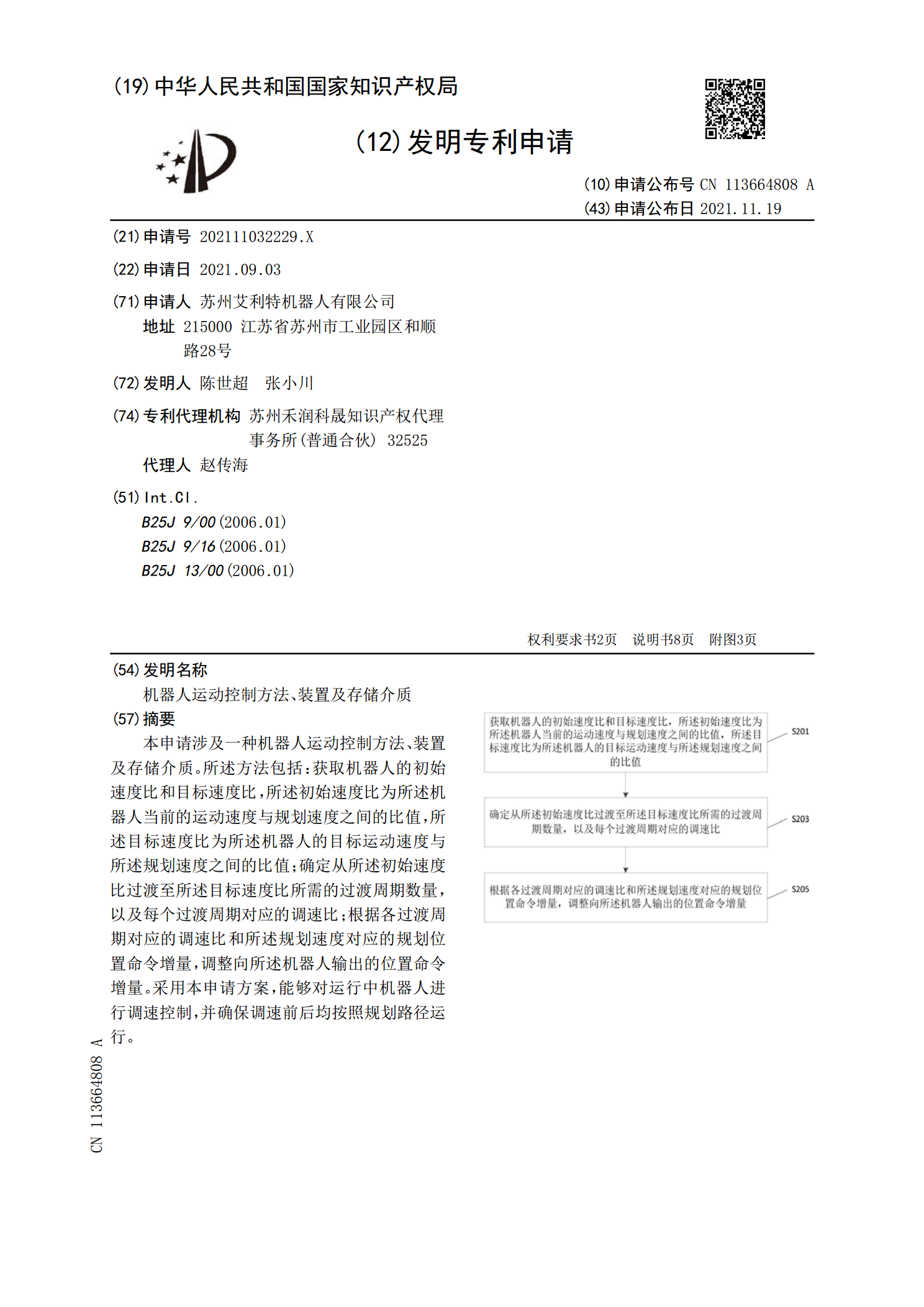
本申请涉及一种机器人运动控制方法、装置及存储介质。所述方法包括:获取机器人的初始速度比和目标速度比,所述初始速度比为所述机器人当前的运动速度与规划速度之间的比值,所述目标速度比为所述机器人的目标运动速度与所述规划速度之间的比值;确定从所述初始速度比过渡至所述目标速度比所需的过渡周期数量,以及每个过渡周期对应的调速比;根据各过渡周期对应的调速比和所述规划速度对应的规划位置命令增量,调整向所述机器人输出的位置命令增量。采用本申请方案,能够对运行中机器人进行调速控制,并确保调速前后均按照规划路径运行。

运动控制方法、装置、机器人及存储介质.pdf
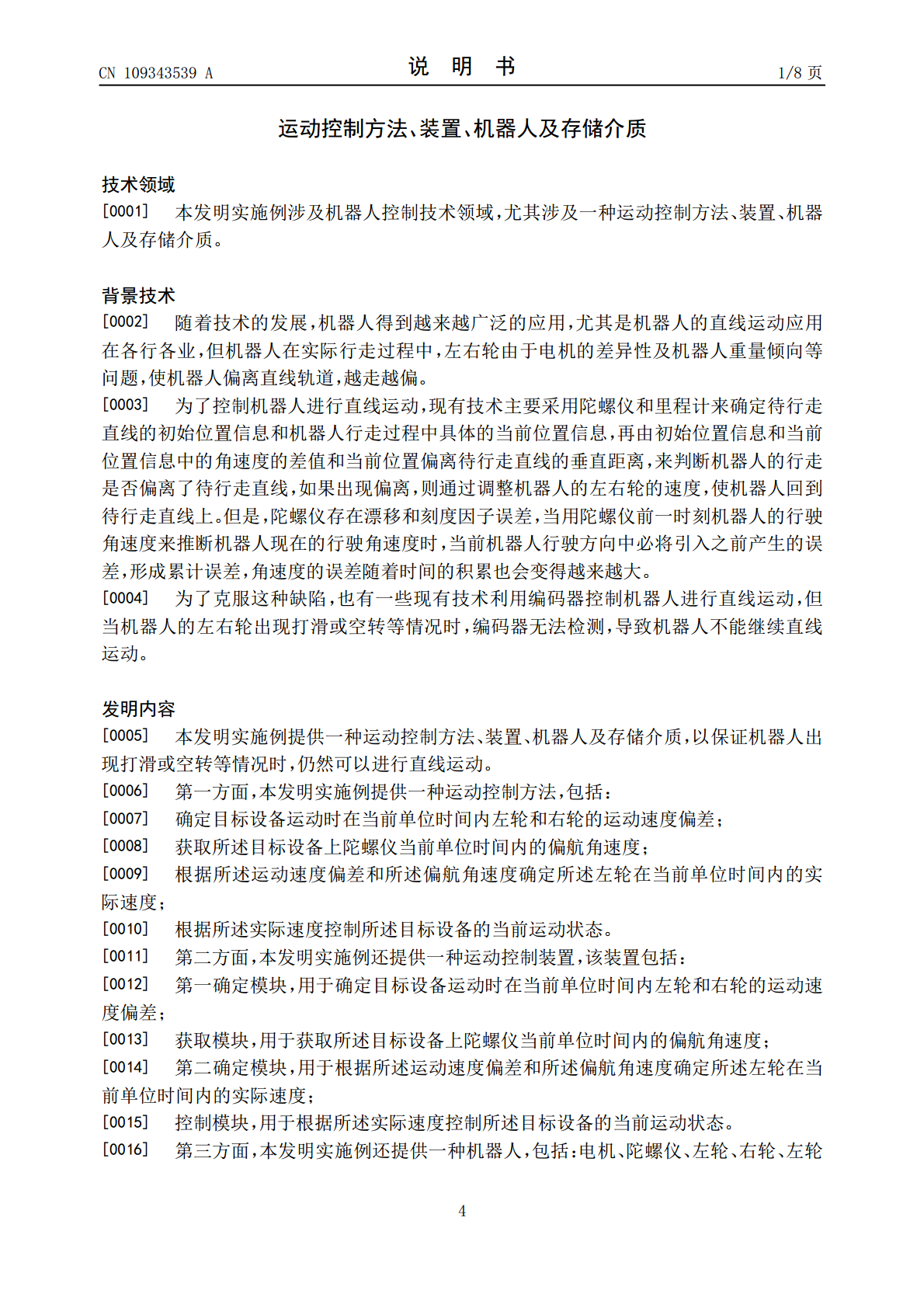
本发明公开了一种运动控制方法、装置、机器人及存储介质,该方法包括:确定目标设备运动时在当前单位时间内左轮和右轮的运动速度偏差,获取所述目标设备上陀螺仪当前单位时间内的偏航角速度,根据所述运动速度偏差和所述偏航角速度确定所述左轮在当前单位时间内的实际速度,根据所述实际速度控制所述目标设备的当前运动状态,通过上述技术方案,解决了现有技术中单纯的采用左右轮编码器或者陀螺仪导致的目标设备行进过程中,无法保持直线行进的问题,保证了目标设备在打滑状态下依然可以进行直线运动,同时减小了误差。
机器人运动控制方法、装置、设备及存储介质.pdf
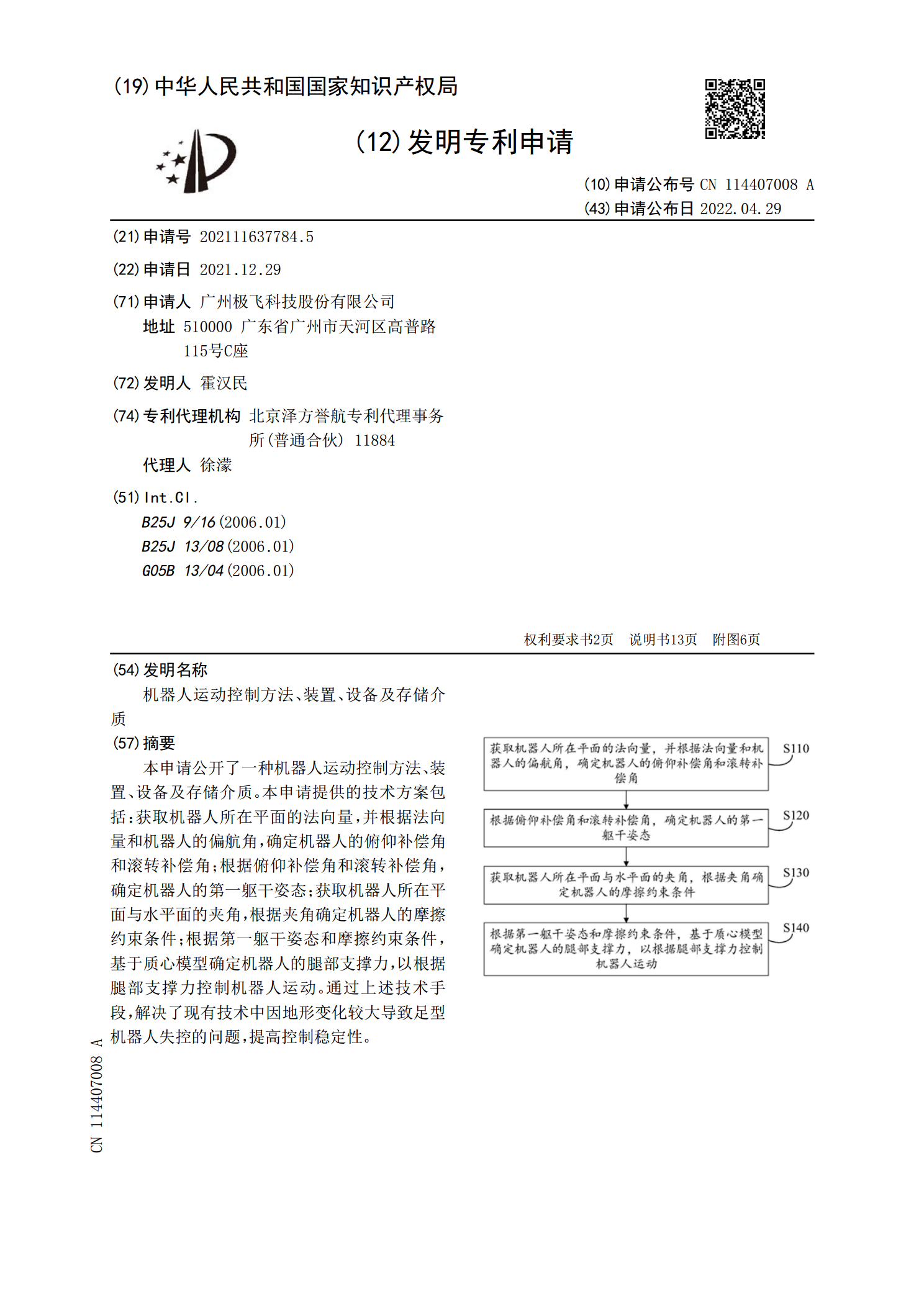
本申请公开了一种机器人运动控制方法、装置、设备及存储介质。本申请提供的技术方案包括:获取机器人所在平面的法向量,并根据法向量和机器人的偏航角,确定机器人的俯仰补偿角和滚转补偿角;根据俯仰补偿角和滚转补偿角,确定机器人的第一躯干姿态;获取机器人所在平面与水平面的夹角,根据夹角确定机器人的摩擦约束条件;根据第一躯干姿态和摩擦约束条件,基于质心模型确定机器人的腿部支撑力,以根据腿部支撑力控制机器人运动。通过上述技术手段,解决了现有技术中因地形变化较大导致足型机器人失控的问题,提高控制稳定性。

机器人运动控制方法、装置、机器人及存储介质.pdf
本申请提供一种机器人运动控制方法、装置、机器人及存储介质,机器人运动控制包括:确定机器人的目标支撑状态,采用目标支撑状态对应的目标支撑相控制器,根据目标支撑状态确定机器人的运动轨迹,采用目标支撑相控制器根据运动轨迹控制机器人运动,机器人包括第一支撑相控制器和第二支撑相控制器,第一支撑相控制器用于控制机器人在单足支撑状态的运动轨迹,第二支撑相控制器用于控制机器人在双足支撑状态的运动轨迹,目标支撑相控制器为第一支撑相控制器和第二支撑相控制器中的一个。采用机器人的目标支撑状态对应的目标支撑相控制器确定机器人的运

机器人运动控制方法、装置、机器人及存储介质.pdf
本申请公开了一种机器人运动控制方法、装置、机器人及存储介质,涉及人工智能的机器人控制技术领域。所述方法包括:基于机器人待执行的目标运动所需达到的目标状态,通过非线性模型预测控制算法根据目标函数优化得到机器人各关节在未来特定时间间隔的关节期望运动数据;根据关节期望运动数据得到机器人各关节的关节执行力矩;通过该关节执行力矩控制机器人各关节运动,以使机器人向目标状态运动。本申请能够控制机器人按照预期完成目标运动,丰富了机器人的运动能力;并且,采用非线性模型预测控制算法优化生成全局最优且符合机器人相关特性的关节期