
一种动能执行器及工作方法.pdf

阳炎****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种动能执行器及工作方法.pdf
本发明属于自动化技术领域,具体涉及一种动能执行器及工作方法。该动能执行器包括:承载件,其作为安装载体;电机,其固定安装在承载件上,作为动力源;旋转输出件,其可旋转地安装在承载件,对外输出旋转驱动力;减速传动组,其动力连接在旋转输出件和电机的输出轴之间,将电机的旋转驱动力减速增扭后传递给旋转输出件;光码盘,其与电机的输出轴同轴连接,随电机的输出轴同步旋转;光电传感器,其固定安装并检测光码盘的旋转,光电传感器检测光码盘的旋转角度和旋转方向。本发明提供的动能执行器,结构紧凑,外形规整,具有大的减速比,能够简便准

一种弹簧复位电动执行器传动结构及其工作方法.pdf
本发明涉及一种弹簧复位电动执行器传动结构及其工作方法,该弹簧复位电动执行器传动结构包括刹车电机、超越离合器、主轴、弹簧蓄能机构,所述刹车电机的输出轴经所述超越离合器与所述主轴传动配合,以使所述刹车电机可驱动所述主轴的转动,所述主轴与阀门的阀杆传动配合;所述弹簧蓄能机构包括蓄能弹簧,该蓄能弹簧与所述主轴传动配合,以使所述主轴转动时,阀门阀杆转动同时蓄能弹簧发生形变,进行能量存储;刹车电机失电时,蓄能弹簧复位,驱动主轴反向转动,带动阀门阀杆反向转动,实现阀门复位,当主轴停止转动时,刹车电机输出轴的转动由超越离
一种功率分流式的动能回收系统及其工作方法.pdf
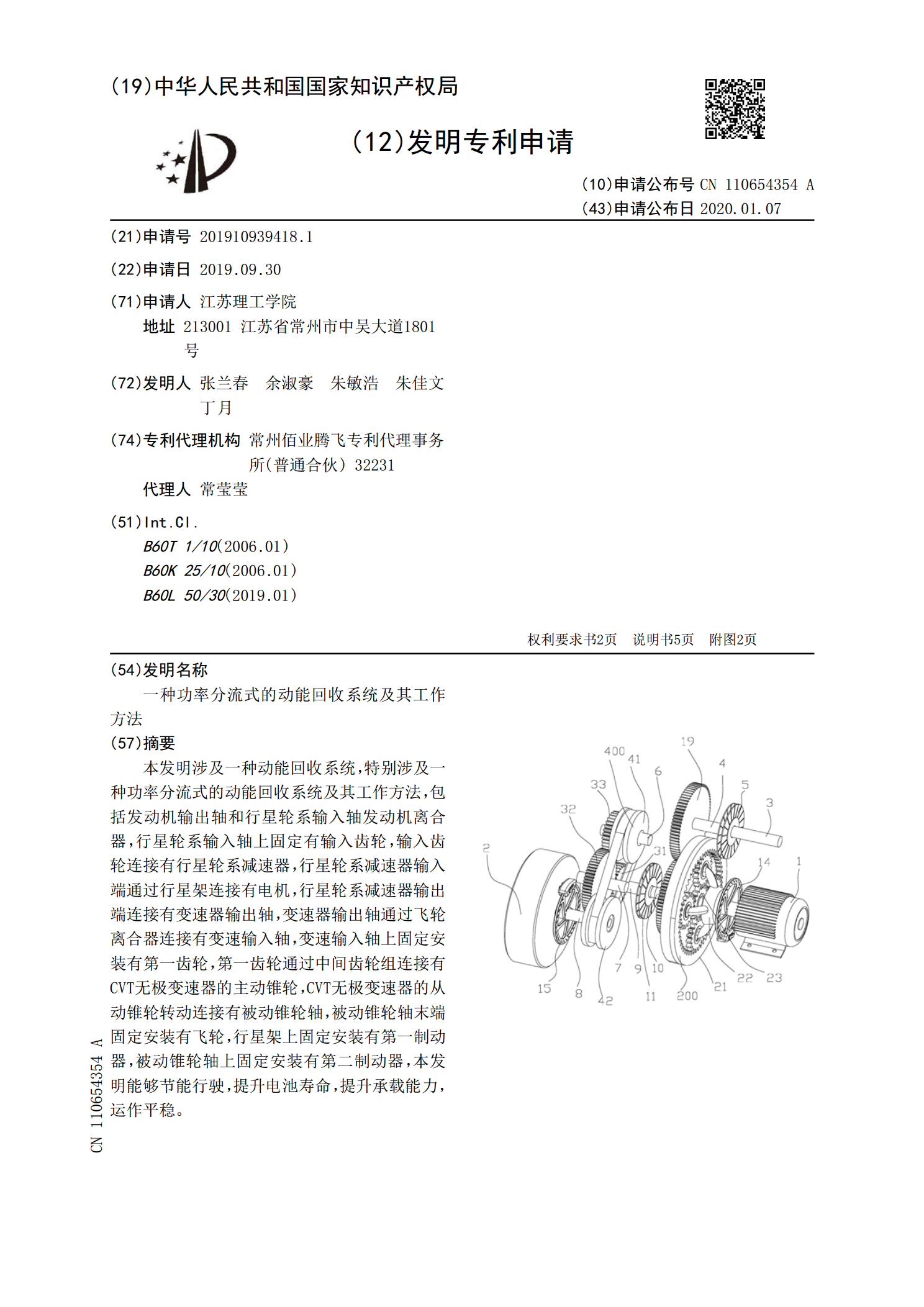
本发明涉及一种动能回收系统,特别涉及一种功率分流式的动能回收系统及其工作方法,包括发动机输出轴和行星轮系输入轴发动机离合器,行星轮系输入轴上固定有输入齿轮,输入齿轮连接有行星轮系减速器,行星轮系减速器输入端通过行星架连接有电机,行星轮系减速器输出端连接有变速器输出轴,变速器输出轴通过飞轮离合器连接有变速输入轴,变速输入轴上固定安装有第一齿轮,第一齿轮通过中间齿轮组连接有CVT无极变速器的主动锥轮,CVT无极变速器的从动锥轮转动连接有被动锥轮轴,被动锥轮轴末端固定安装有飞轮,行星架上固定安装有第一制动器,被
一种狭小空间多功能自动钻铆末端执行器及工作方法.pdf
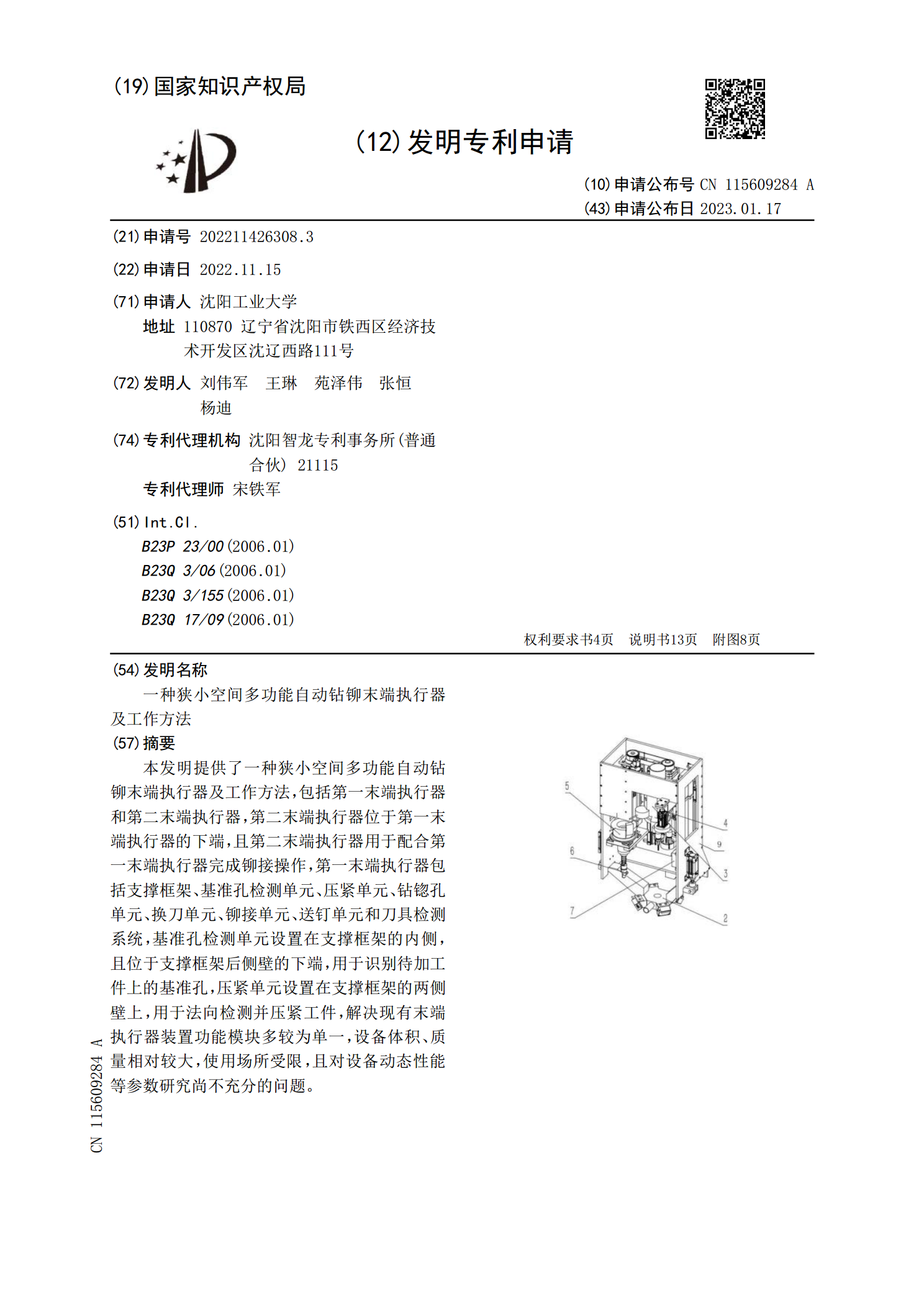
本发明提供了一种狭小空间多功能自动钻铆末端执行器及工作方法,包括第一末端执行器和第二末端执行器,第二末端执行器位于第一末端执行器的下端,且第二末端执行器用于配合第一末端执行器完成铆接操作,第一末端执行器包括支撑框架、基准孔检测单元、压紧单元、钻锪孔单元、换刀单元、铆接单元、送钉单元和刀具检测系统,基准孔检测单元设置在支撑框架的内侧,且位于支撑框架后侧壁的下端,用于识别待加工件上的基准孔,压紧单元设置在支撑框架的两侧壁上,用于法向检测并压紧工件,解决现有末端执行器装置功能模块多较为单一,设备体积、质量相对较

一种可手动操作的电动开闭门/盖执行器及其工作方法.pdf
一种可手动操作的电动开闭门/盖执行器及其工作方法,执行器包括电机、主动轮、离合轮、离合盘和电子控制模块,所述主动轮设于电机的旋转主轴上,所述离合盘设于离合轮上,所述主动轮和离合轮啮合;所述电机与所述电子控制模块电性连接。本发明所述的可手动操作的电动开闭门/盖执行器,其结构合理紧凑,同时具有电动和手动开关门功能,能够满足客户不同使用习惯。无论是电动模式还是手动模式,无需切换,操作简单,使用方便,可以适用于多种应用场景,具有极高的应用价值。