
机械手夹持确认装置.pdf

元枫****文章


1/9

2/9

3/9
4/9
5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

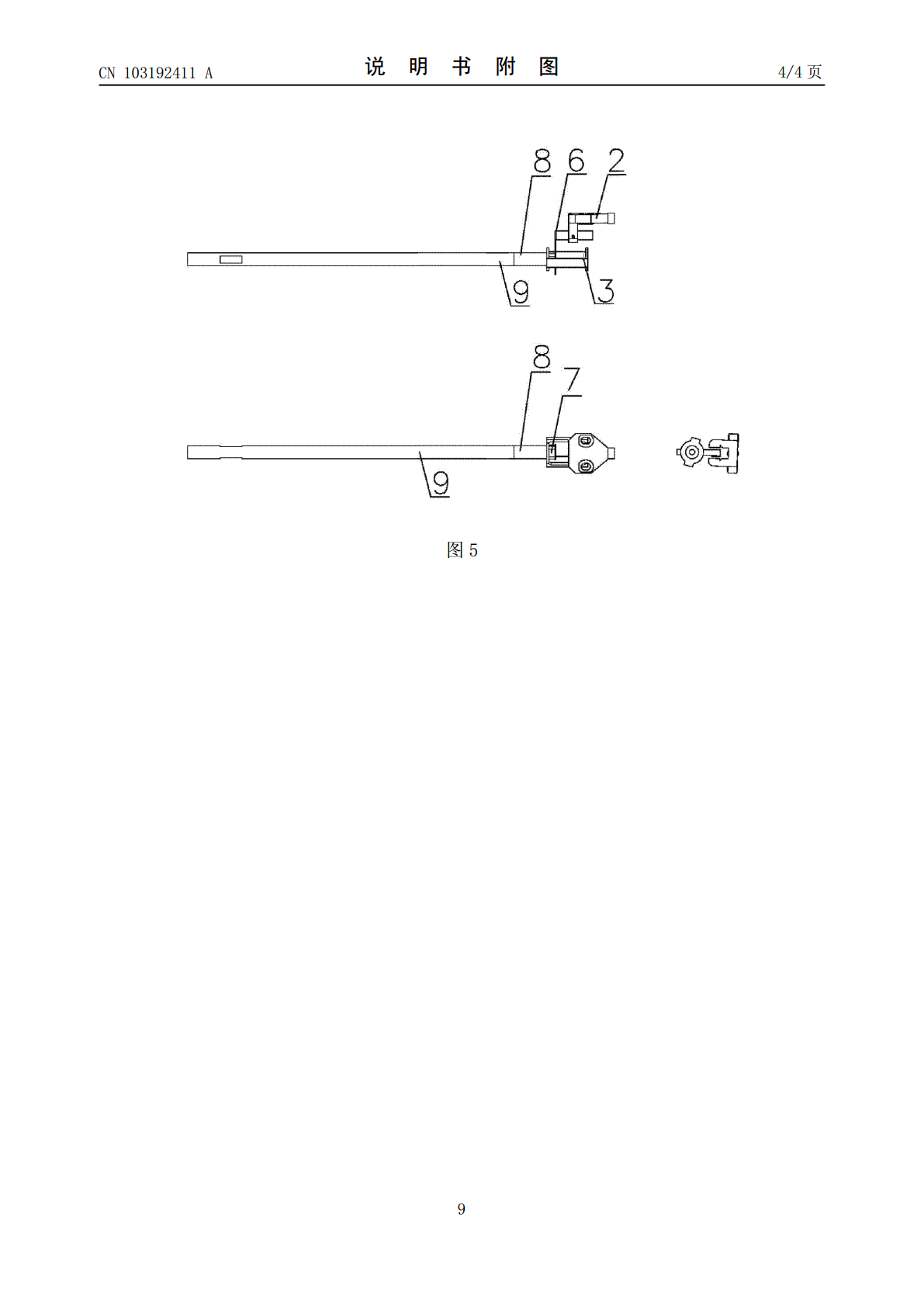
机械手夹持确认装置.pdf
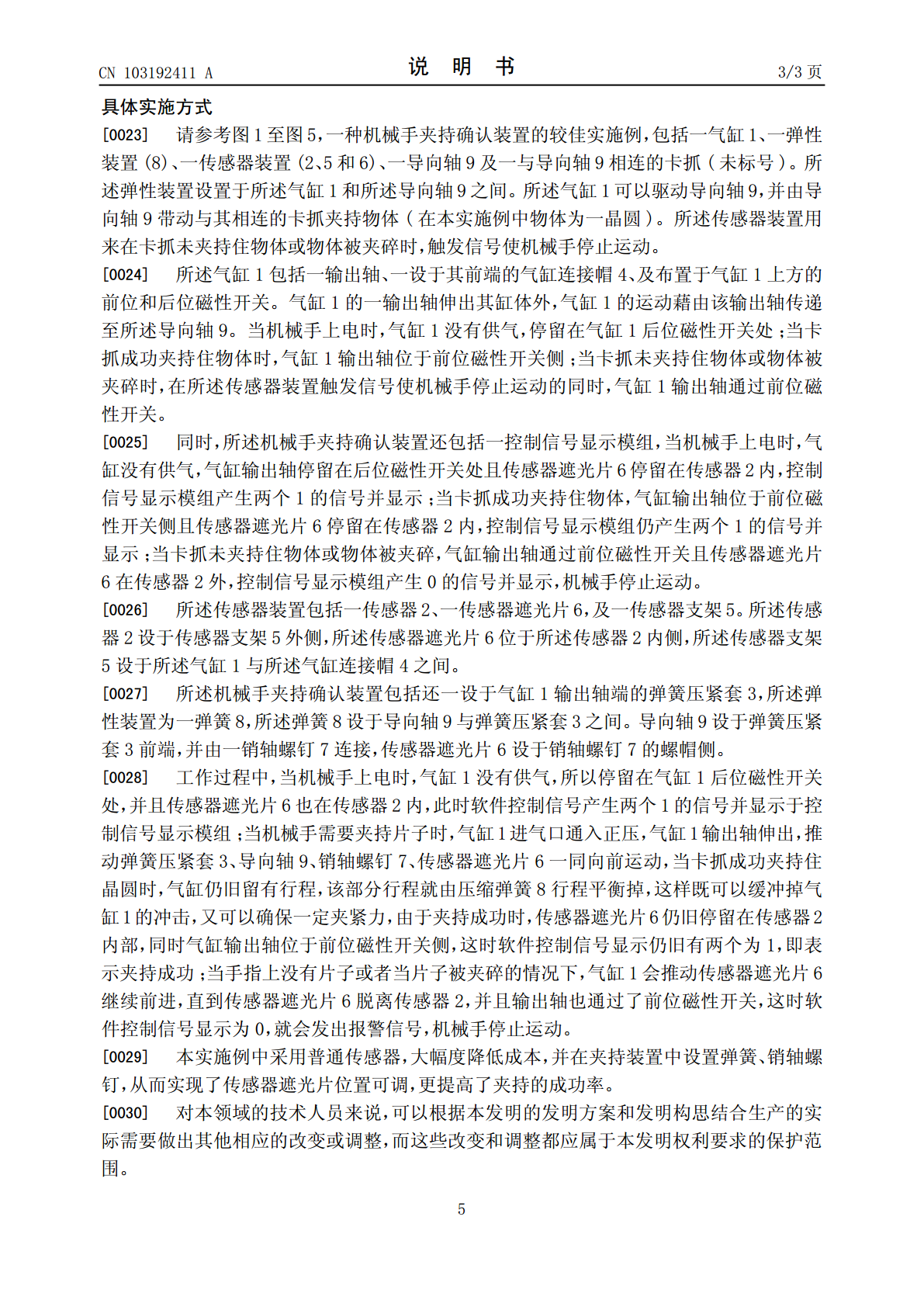
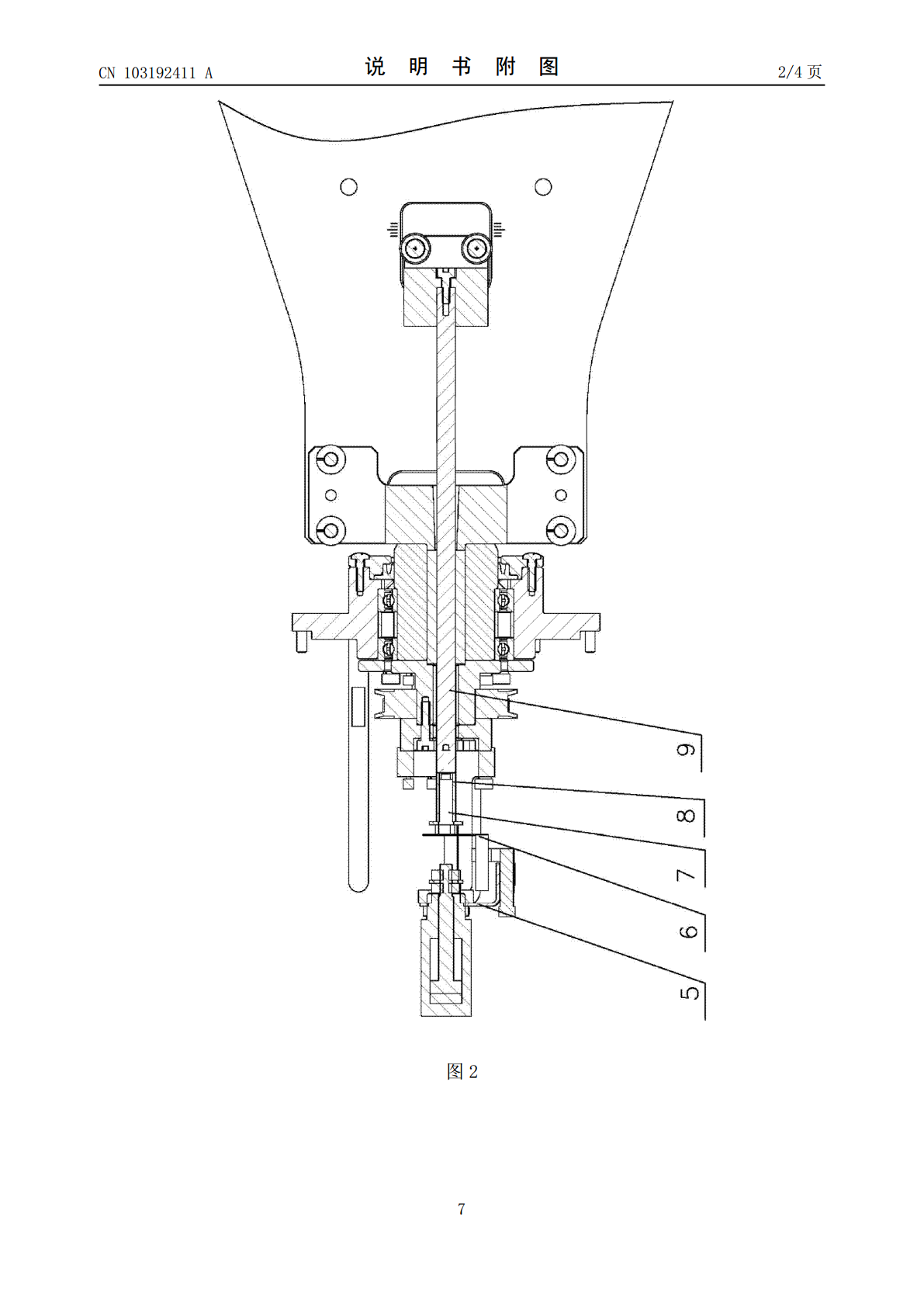
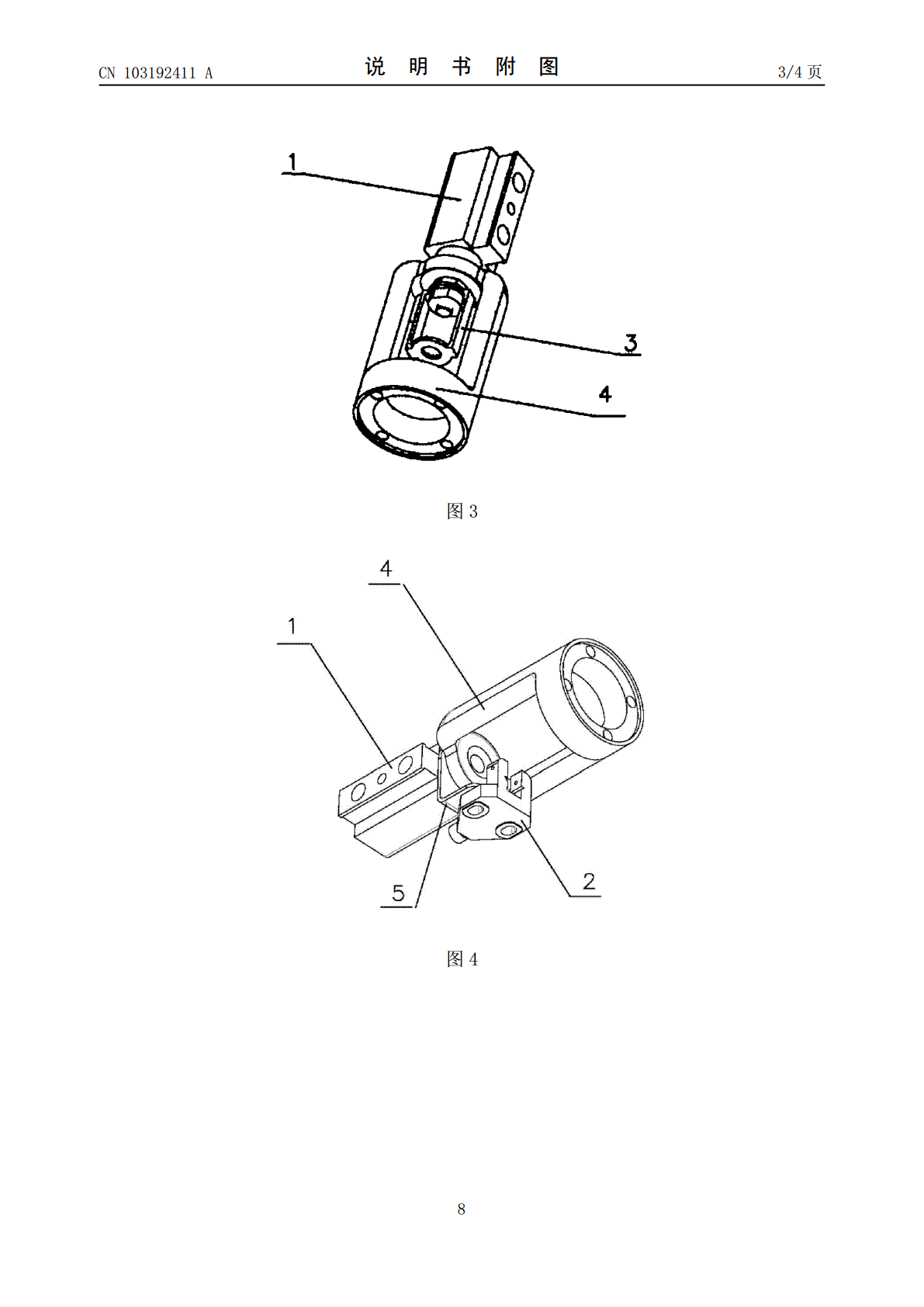
一种机械手夹持确认装置,包括一气缸、一传感器装置、一导向轴及一与导向轴相连的卡抓,所述气缸具一输出轴,所述气缸的运动藉由其输出轴传递至所述导向轴,所述夹持确认装置还包括一弹性装置,所述弹性装置设置于所述气缸的输出轴和所述导向轴之间;所述传感器装置设置于所述气缸的输出轴端;当机械手需要夹持物体时,所述气缸输出轴带动所述导向轴及传感器装置运动,当卡抓夹持住物体时,藉由弹性装置的作用,气缸仍留有行程;当卡抓未夹持住物体或物体被夹碎时,所述气缸带动所述传感器装置一直前进,直到传感器装置触发信号使机械手停止运动。本
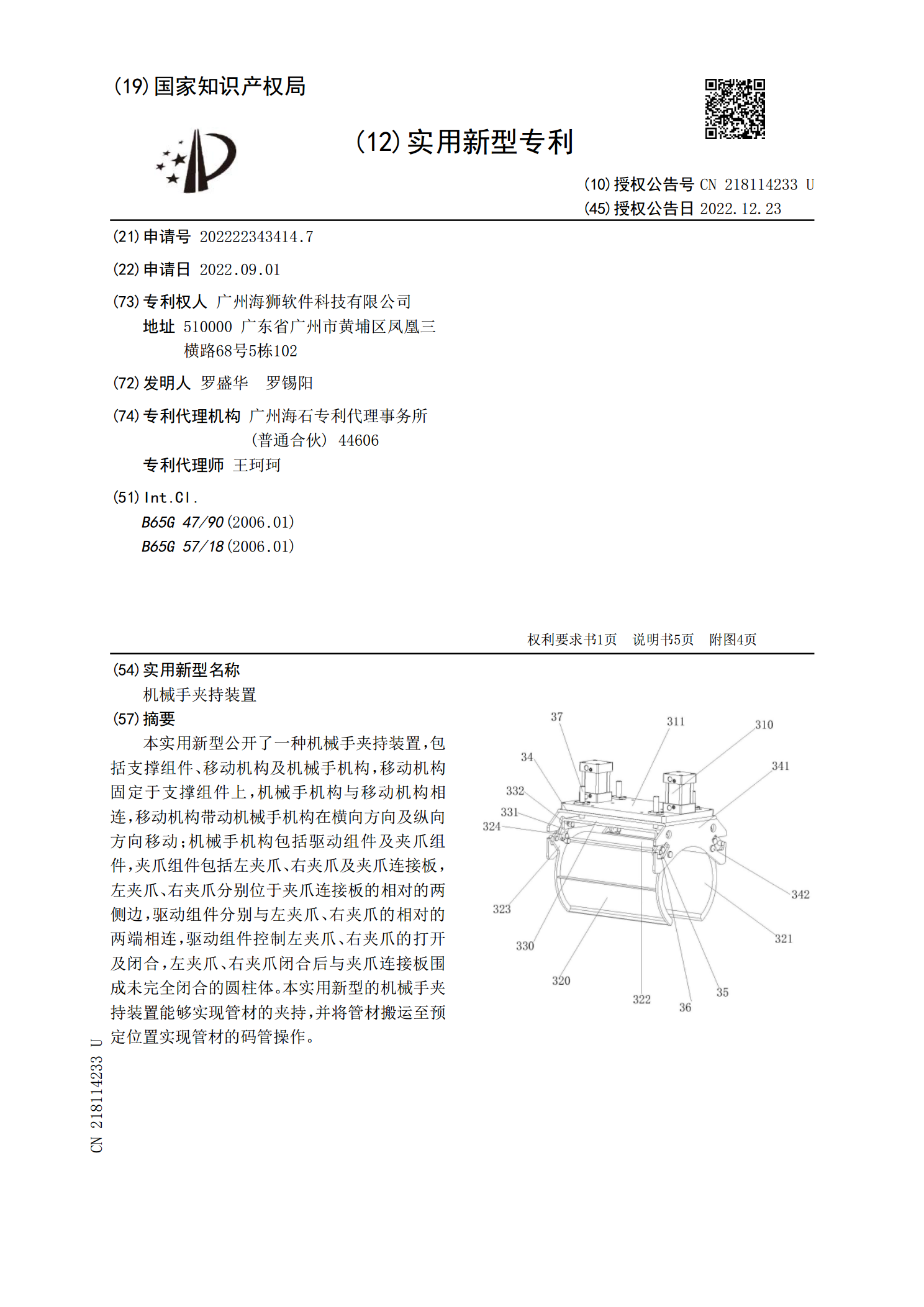
机械手夹持装置.pdf
本实用新型公开了一种机械手夹持装置,包括支撑组件、移动机构及机械手机构,移动机构固定于支撑组件上,机械手机构与移动机构相连,移动机构带动机械手机构在横向方向及纵向方向移动;机械手机构包括驱动组件及夹爪组件,夹爪组件包括左夹爪、右夹爪及夹爪连接板,左夹爪、右夹爪分别位于夹爪连接板的相对的两侧边,驱动组件分别与左夹爪、右夹爪的相对的两端相连,驱动组件控制左夹爪、右夹爪的打开及闭合,左夹爪、右夹爪闭合后与夹爪连接板围成未完全闭合的圆柱体。本实用新型的机械手夹持装置能够实现管材的夹持,并将管材搬运至预定位置实现管

夹持式机械手装置.pdf
本发明公开了一种夹持式机械手装置,其中,包括:机架,其后部设置有一纵向滑槽,且前部设置有一横向滑槽;两个滑台,该两个滑台各以能够左右滑动的方式设置于所述横向滑槽内;且各设置有一第一齿条部;两个夹爪,该两个夹爪的后端各设置于一个所述滑台上;两个双联齿轮,该两个双联齿轮设置于所述机架上;该两个双联齿轮的下齿轮各与一个所述滑台的第一齿条部进行啮合连接;滑杆,其以能够前后滑动的方式设置于所述纵向滑槽内,其左右两侧各设置有一第二齿条部,且两个第二齿条部各与一个所述双联齿轮的上齿轮进行啮合连接;以及驱动机构,其用于驱
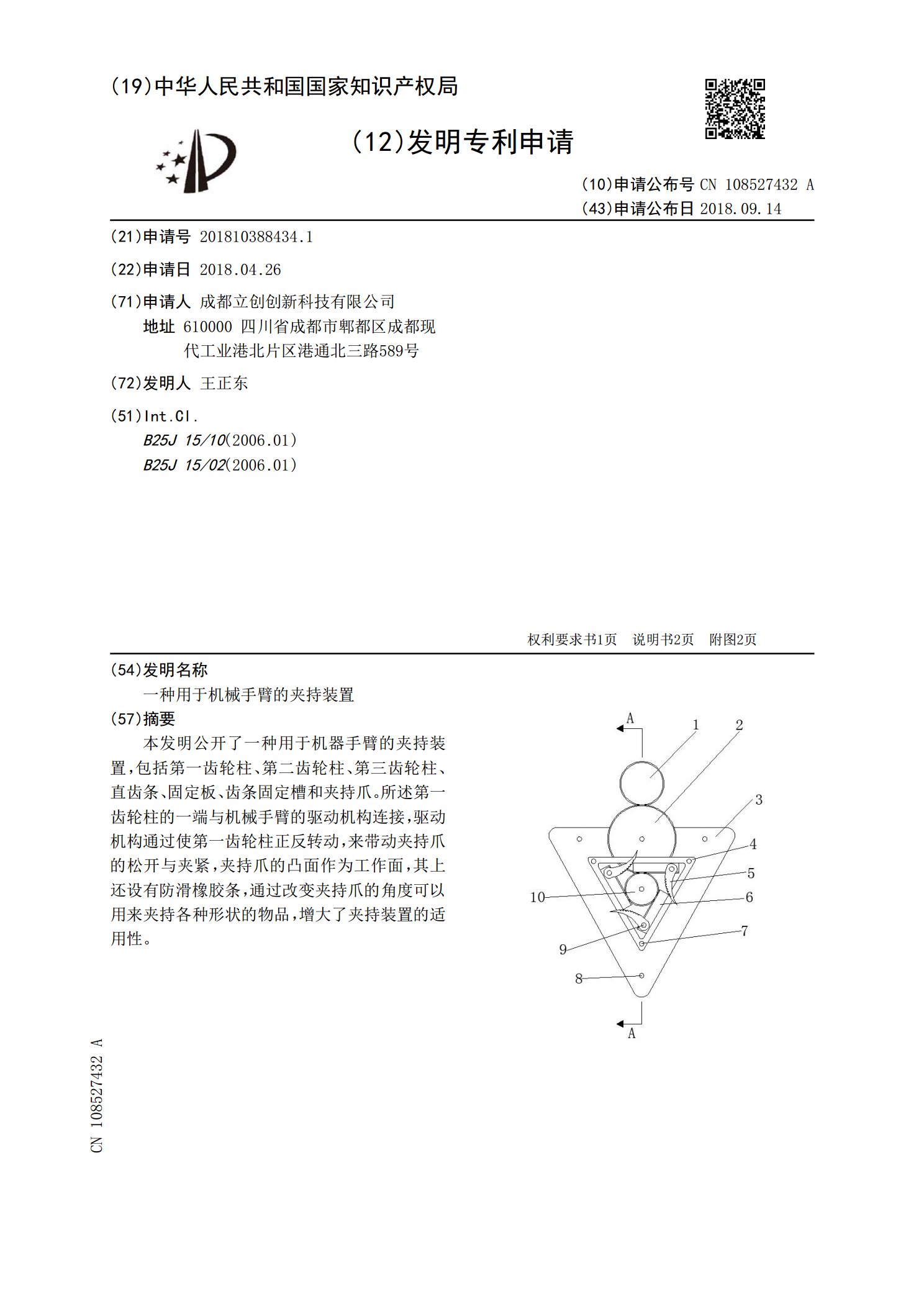
一种用于机械手臂的夹持装置.pdf
本发明公开了一种用于机器手臂的夹持装置,包括第一齿轮柱、第二齿轮柱、第三齿轮柱、直齿条、固定板、齿条固定槽和夹持爪。所述第一齿轮柱的一端与机械手臂的驱动机构连接,驱动机构通过使第一齿轮柱正反转动,来带动夹持爪的松开与夹紧,夹持爪的凸面作为工作面,其上还设有防滑橡胶条,通过改变夹持爪的角度可以用来夹持各种形状的物品,增大了夹持装置的适用性。
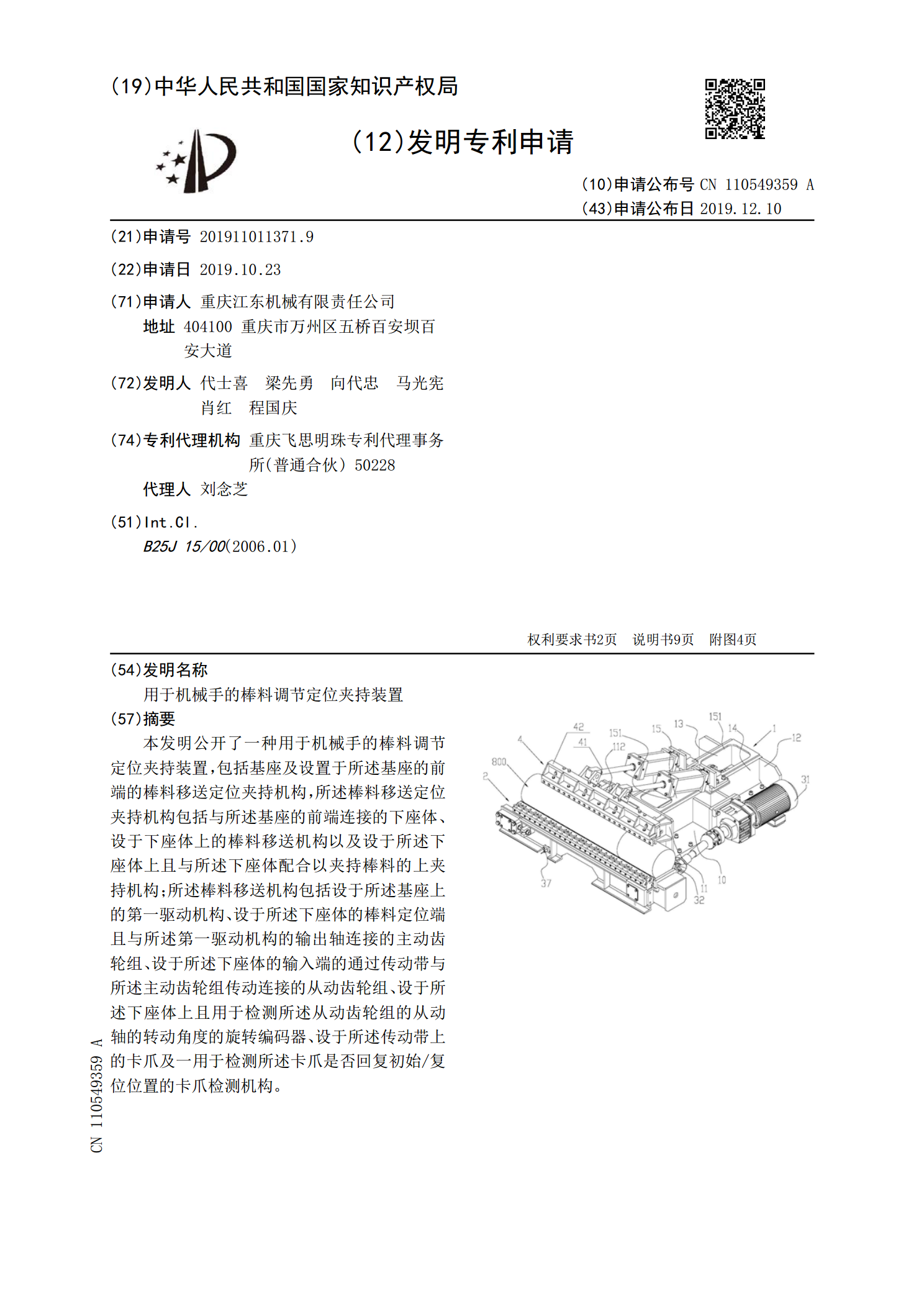
用于机械手的棒料调节定位夹持装置.pdf
本发明公开了一种用于机械手的棒料调节定位夹持装置,包括基座及设置于所述基座的前端的棒料移送定位夹持机构,所述棒料移送定位夹持机构包括与所述基座的前端连接的下座体、设于下座体上的棒料移送机构以及设于所述下座体上且与所述下座体配合以夹持棒料的上夹持机构;所述棒料移送机构包括设于所述基座上的第一驱动机构、设于所述下座体的棒料定位端且与所述第一驱动机构的输出轴连接的主动齿轮组、设于所述下座体的输入端的通过传动带与所述主动齿轮组传动连接的从动齿轮组、设于所述下座体上且用于检测所述从动齿轮组的从动轴的转动角度的旋转编