
一种在车辆动态行驶中的拥堵检测方法.pdf

瀚玥****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种在车辆动态行驶中的拥堵检测方法.pdf
一种在车辆动态行驶中的拥堵检测方法,该方法包括如下步骤:1)、车辆前景检测:通过视频拍摄,框选每一帧灰度图的某一区域采用Vibe算法进行背景建模,并提取车辆运动前景,对每个运动前景进行面积过滤,滤除面积太大或太小的前景,保留最有可能是车辆的前景;2)、车辆跟踪:FHOG特征提取完成以后,分别用平移滤波器和尺度滤波器对目标进行平移跟踪和尺度跟踪;3)、根据跟踪的结果计算每一个车辆目标的实时速度,并对累积实时速度Va进行更新,更新率可以设置成0.1;判断Va是否小于一定阈值,若是,代表车辆拥堵并进行报警,否则
一种车辆行驶期间检测轮胎动态垂直载荷的方法及系统.pdf
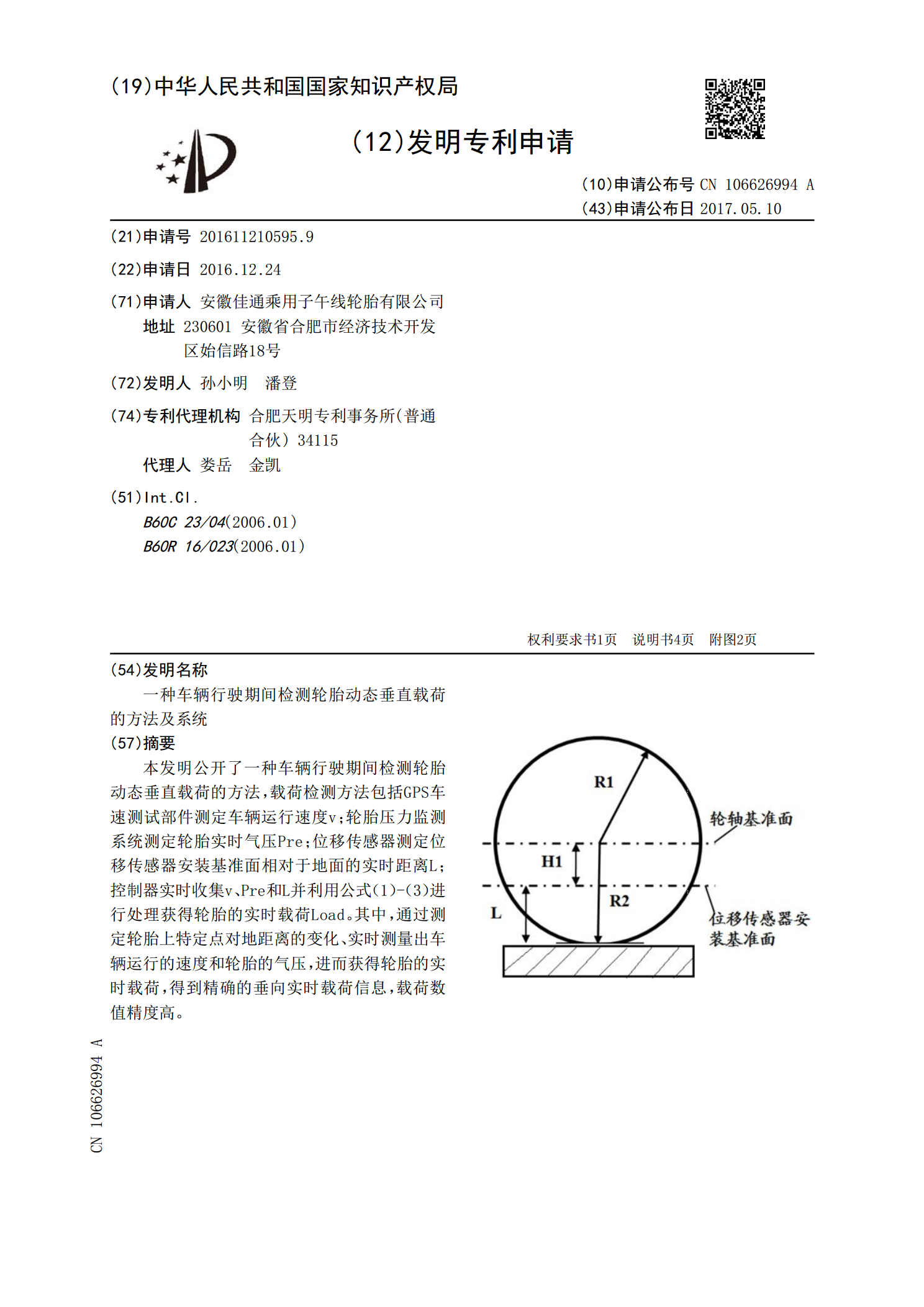
本发明公开了一种车辆行驶期间检测轮胎动态垂直载荷的方法,载荷检测方法包括GPS车速测试部件测定车辆运行速度v;轮胎压力监测系统测定轮胎实时气压Pre;位移传感器测定位移传感器安装基准面相对于地面的实时距离L;控制器实时收集v、Pre和L并利用公式(1)‑(3)进行处理获得轮胎的实时载荷Load。其中,通过测定轮胎上特定点对地距离的变化、实时测量出车辆运行的速度和轮胎的气压,进而获得轮胎的实时载荷,得到精确的垂向实时载荷信息,载荷数值精度高。

一种检测车辆行驶方向的方法.pdf
本发明涉及一种检测车辆行驶方向的方法。所述车辆至少包含一个由原动机通过传动系驱动的车轮。该方法包含至少根据车速和车身倾斜度来确定车辆行驶方向的步骤。

动态公路车辆自动衡器非正常行驶的检测方法探析.docx
动态公路车辆自动衡器非正常行驶的检测方法探析标题:动态公路车辆自动衡器非正常行驶的检测方法探析摘要:随着公路交通的不断发展和车辆运输需求的不断增加,动态公路车辆自动衡器在车辆载重检测中扮演着重要的角色。但是,由于车辆自动衡器工作环境的复杂性以及车辆运行过程中的各种干扰因素,导致车辆自动衡器在一些非正常行驶情况下的准确性和可靠性受到影响。因此,本文对动态公路车辆自动衡器非正常行驶的检测方法进行了探析。1.引言2.动态公路车辆自动衡器的原理和工作过程3.动态公路车辆自动衡器的非正常行驶情况3.1非平稳载荷条件

一种车辆行驶限高障碍检测方法.pdf
本发明公开了一种车辆行驶限高障碍检测方法,包括以下步骤:S1、获取车型数据,并根据车型数据绘制车顶曲面;将车顶面分割为沿车辆长度方向延伸的分析曲线,车顶曲面包括每一条分析曲线上的最高点;S2、建立三维坐标,并且以地面为参考面,在三维坐标中对车顶曲面建模;S3、获取车辆前方图像,并且以地面为参考面,在三维坐标中对车辆前方图像建模;S4、判断三维坐标中,车辆前方图像与车顶曲面是否有交点;否,则返回步骤S3;S5、是,则向驾驶员告警。本发明提高了障碍物判断的效率,从而,有利于给驾驶员预留更加充足的反应时间。