
一种车辆行驶限高障碍检测方法.pdf

论文****轩吖


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种车辆行驶限高障碍检测方法.pdf
本发明公开了一种车辆行驶限高障碍检测方法,包括以下步骤:S1、获取车型数据,并根据车型数据绘制车顶曲面;将车顶面分割为沿车辆长度方向延伸的分析曲线,车顶曲面包括每一条分析曲线上的最高点;S2、建立三维坐标,并且以地面为参考面,在三维坐标中对车顶曲面建模;S3、获取车辆前方图像,并且以地面为参考面,在三维坐标中对车辆前方图像建模;S4、判断三维坐标中,车辆前方图像与车顶曲面是否有交点;否,则返回步骤S3;S5、是,则向驾驶员告警。本发明提高了障碍物判断的效率,从而,有利于给驾驶员预留更加充足的反应时间。

一种检测车辆行驶方向的方法.pdf
本发明涉及一种检测车辆行驶方向的方法。所述车辆至少包含一个由原动机通过传动系驱动的车轮。该方法包含至少根据车速和车身倾斜度来确定车辆行驶方向的步骤。
一种行驶车辆检测方法、装置及系统.pdf
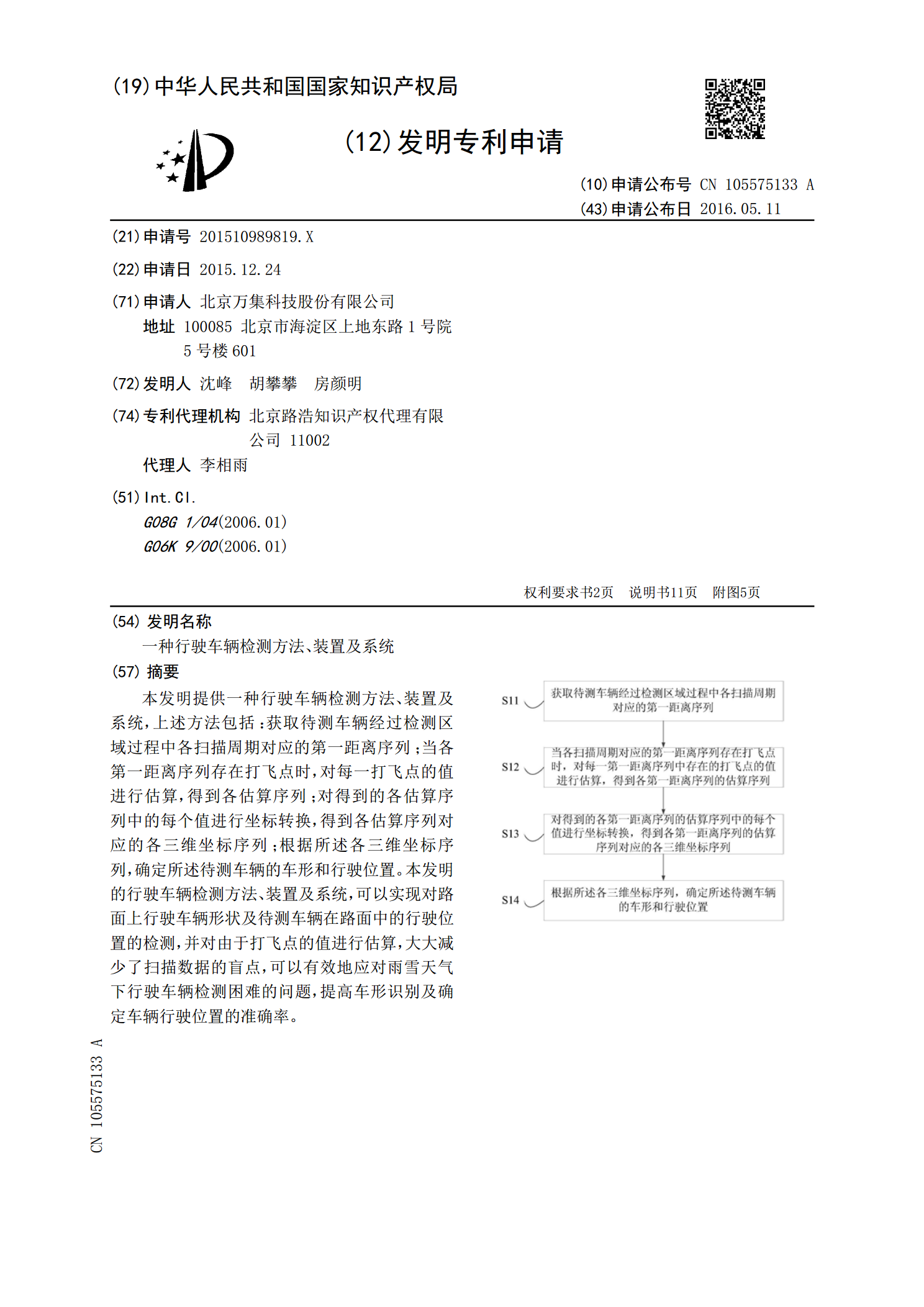
本发明提供一种行驶车辆检测方法、装置及系统,上述方法包括:获取待测车辆经过检测区域过程中各扫描周期对应的第一距离序列;当各第一距离序列存在打飞点时,对每一打飞点的值进行估算,得到各估算序列;对得到的各估算序列中的每个值进行坐标转换,得到各估算序列对应的各三维坐标序列;根据所述各三维坐标序列,确定所述待测车辆的车形和行驶位置。本发明的行驶车辆检测方法、装置及系统,可以实现对路面上行驶车辆形状及待测车辆在路面中的行驶位置的检测,并对由于打飞点的值进行估算,大大减少了扫描数据的盲点,可以有效地应对雨雪天气下行驶

一种车辆行驶车道的检测系统和方法.pdf
本发明涉及车辆行驶车道检测领域,具体是一种车辆行驶车道的检测系统和方法,包括有车道信息装置、车辆信息标识装置、车辆行驶车道信息收集基站和云平台,所述车辆信息标识装置安装在车辆上,并可与所述的车辆行驶车道信息收集基站通信连接,所述的车辆行驶车道信息收集基站与所述的云平台通信连接,所述车道信息装置安装在车道地下或路边,用于记载车道信息,并向外广播带车道信息的激励信号,车辆信息标识装置用于实时接收各个车道信息装置的激励信号。本发明能实现有车牌或无车牌车辆行驶轨迹的检测;车道检测不限于主车道和辅车道,且车辆行驶轨

一种控制车辆行驶的方法及车辆.pdf
本发明实施例提供一种控制车辆行驶的方法及车辆,该方法包括:接收向车辆发送的第一控制信号,根据第一控制信号,各个车轮组的标识信息、以及各个车轮组的纹路控制各车轮组向前或向后转动。本发明实施例提供的控制车辆行驶的方法,在保留车辆直行与转弯功能的同时,增加了车辆横移的功能,使得驾驶员驾驶车辆或进行停车时更加方便,对于新手司机,降低了驾驶难度,提高了驾驶体验。