
机器人集群搜救方法.pdf

又珊****ck


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机器人集群搜救方法.pdf
本发明涉及一种机器人集群搜救方法,包括:若干搜救机器人构成集群且保持队形从原地向疑似目标的方向进行,依次在进行方向上对分布的若干疑似搜索区域进行搜索;以及当疑似搜索区域未发现目标时,则遗留一搜救机器人在该疑似搜索区域内,其余搜救机器人保持集群状态继续进行,直至搜索到目标;本发明可以在相应疑似搜索区域继续展开搜救动作,以提高搜救成功率,并且当前方发现搜救目标后,电能补给机器人协同遗留下的搜救机器人共同赶赴目标位置,通过大量机器人在目标位置协同工作,提高了搜救效率,最大限度争取有效的搜救时间,并且加入电能补给

基于ZigBee无线定位的视频搜救机器人及搜救方法.pdf
本发明提供一种基于ZigBee无线定位的视频搜救机器人,包括ZigBee协调器、ZigBee盲节点和三个以上的ZigBee辅助定位机构,所述ZigBee盲节点设置在搜救机器人上,所述搜救机器人上还设置控制器、通信模块、红外监测模块和视频监测模块,所述ZigBee辅助定位机构设置在包围搜救区域的最小正多边形的顶点位置。本发明通过搜救机器人利用热释电红外传感器搜寻生命信号,利用云台摄像头摄取四周的环境图像和视频并利用搜救机器人自建或外部的Wi‑Fi网络发送给智能终端,在搜救机器人上安装有ZigBee盲节点模块
基于多模态融合定位的大鼠搜救机器人及搜救方法.pdf
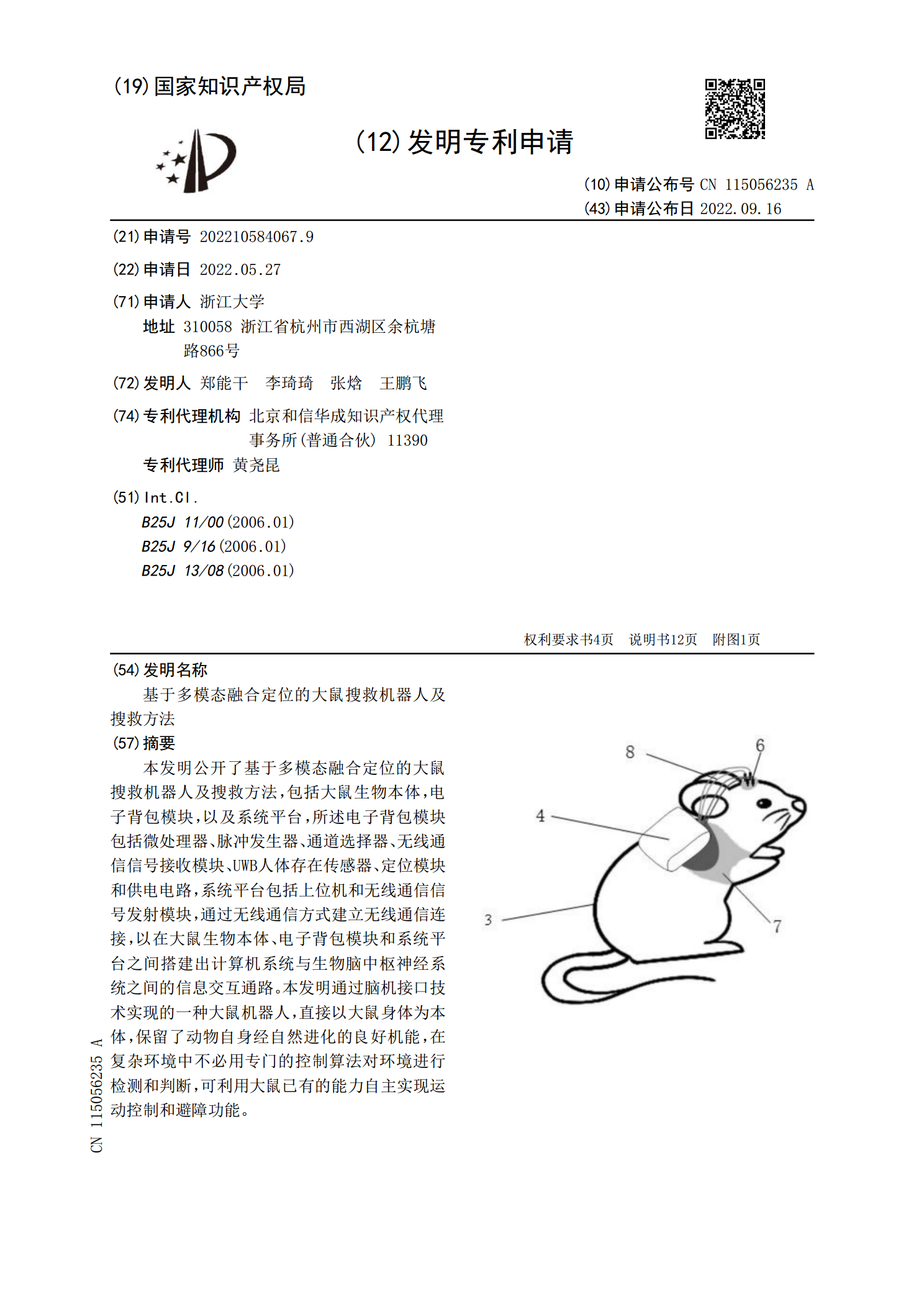
本发明公开了基于多模态融合定位的大鼠搜救机器人及搜救方法,包括大鼠生物本体,电子背包模块,以及系统平台,所述电子背包模块包括微处理器、脉冲发生器、通道选择器、无线通信信号接收模块、UWB人体存在传感器、定位模块和供电电路,系统平台包括上位机和无线通信信号发射模块,通过无线通信方式建立无线通信连接,以在大鼠生物本体、电子背包模块和系统平台之间搭建出计算机系统与生物脑中枢神经系统之间的信息交互通路。本发明通过脑机接口技术实现的一种大鼠机器人,直接以大鼠身体为本体,保留了动物自身经自然进化的良好机能,在复杂环境

搜救机器人.docx
青少年科技创新大赛中学生项目地震被困人员搜救器学生:李振坤蒋明彤指导教师:崔娜佘念利刘秀艳学校:河北省唐山市第一中学2008年12月摘要摘要地震发生后,面对很容易发生二次倒塌的建筑物,救援人员无法深入废墟内及时对受困人员进行搜索和施救。为此,设计一种体形细长的搜救器,它可在复杂表面上前后爬行、转弯和越障,在狭小缝隙间穿行,装有摄像机等传感器进入废墟下探测和定位受伤者,还可以为伤者送去必要的药品和食物。该搜救器采用类似高速列车动车组的模块化结构形式,头尾结构相同,每个中间单元均有电源和驱动器,各单元相对独立

搜救机器人.doc
搜救机器人地动被困人员搜救器学生:李振坤蒋明彤指导教师:崔娜佘念利刘秀艳学校:河北省唐山市第一中学2008年12月摘要地动产生后,面对专门轻易产生二次倾圯的建筑物,救济人员无法深刻废墟内及时对受困人员进行搜刮和施救。为此,设计一种体形细长的搜救器,它可在复杂别处上前后爬行、转弯和越障,在狭小裂缝间穿行,装有摄像机等传感器进入废墟下探测和定位受伤者,还可认为伤者送去须要的药品和食物。该搜救器采取类似高速列车动车组的模块化构造情势,头尾构造雷同,每个中心单位均有电源和驱动器,各单位相对自力并可在现场自由拆装,