
基于多模态融合定位的大鼠搜救机器人及搜救方法.pdf

小寄****淑k

1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多模态融合定位的大鼠搜救机器人及搜救方法.pdf
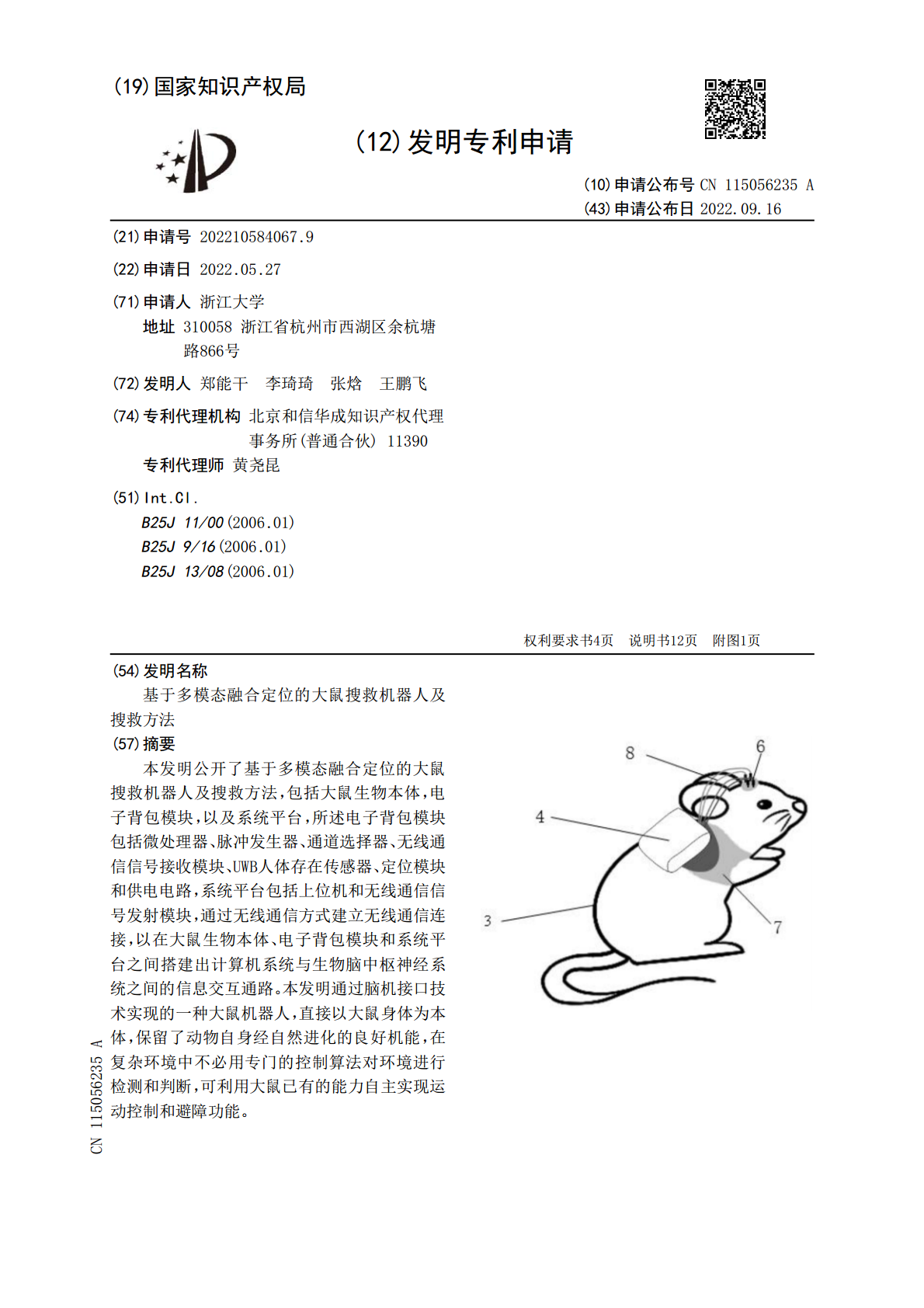
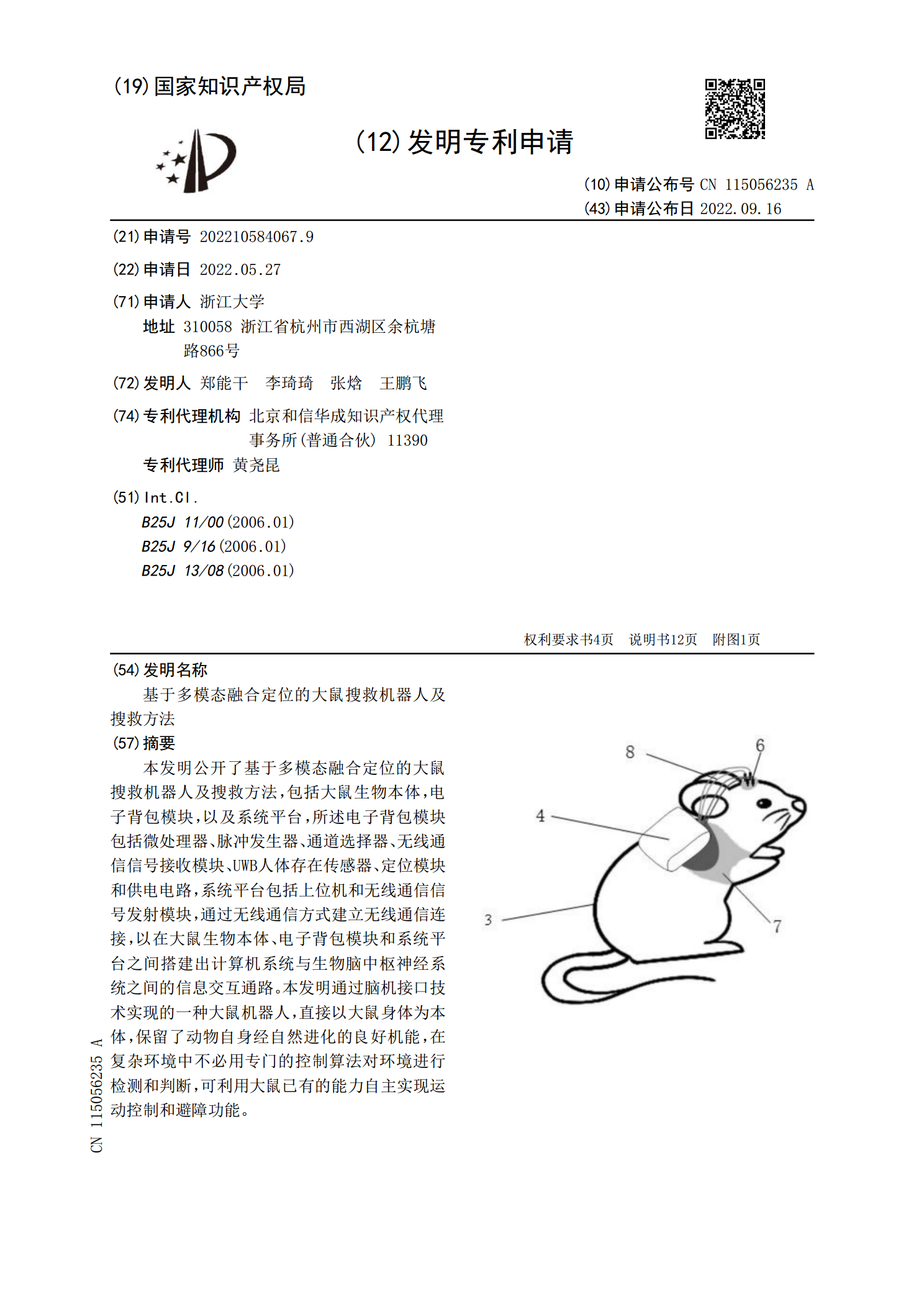
本发明公开了基于多模态融合定位的大鼠搜救机器人及搜救方法,包括大鼠生物本体,电子背包模块,以及系统平台,所述电子背包模块包括微处理器、脉冲发生器、通道选择器、无线通信信号接收模块、UWB人体存在传感器、定位模块和供电电路,系统平台包括上位机和无线通信信号发射模块,通过无线通信方式建立无线通信连接,以在大鼠生物本体、电子背包模块和系统平台之间搭建出计算机系统与生物脑中枢神经系统之间的信息交互通路。本发明通过脑机接口技术实现的一种大鼠机器人,直接以大鼠身体为本体,保留了动物自身经自然进化的良好机能,在复杂环境

基于ZigBee无线定位的视频搜救机器人及搜救方法.pdf
本发明提供一种基于ZigBee无线定位的视频搜救机器人,包括ZigBee协调器、ZigBee盲节点和三个以上的ZigBee辅助定位机构,所述ZigBee盲节点设置在搜救机器人上,所述搜救机器人上还设置控制器、通信模块、红外监测模块和视频监测模块,所述ZigBee辅助定位机构设置在包围搜救区域的最小正多边形的顶点位置。本发明通过搜救机器人利用热释电红外传感器搜寻生命信号,利用云台摄像头摄取四周的环境图像和视频并利用搜救机器人自建或外部的Wi‑Fi网络发送给智能终端,在搜救机器人上安装有ZigBee盲节点模块

基于多传感器信息融合技术的室内火灾搜救型机器人设计.docx
基于多传感器信息融合技术的室内火灾搜救型机器人设计标题:基于多传感器信息融合技术的室内火灾搜救型机器人设计摘要:随着科技的不断进步,机器人在各个领域发挥着重要的作用。室内火灾的发生是极其危险的,但传统的搜救方式受到了很多限制,无法完全保障被困人员的生命安全。因此,本研究提出了一种基于多传感器信息融合技术的室内火灾搜救型机器人设计方案,旨在提高搜救效率和准确性。关键词:室内火灾;机器人;传感器;信息融合;搜救效率1.引言室内火灾常常发生在人员密集的场所,如家庭、工厂、商业建筑等。火灾现场烟雾浓厚、温度高等特

机器人集群搜救方法.pdf
本发明涉及一种机器人集群搜救方法,包括:若干搜救机器人构成集群且保持队形从原地向疑似目标的方向进行,依次在进行方向上对分布的若干疑似搜索区域进行搜索;以及当疑似搜索区域未发现目标时,则遗留一搜救机器人在该疑似搜索区域内,其余搜救机器人保持集群状态继续进行,直至搜索到目标;本发明可以在相应疑似搜索区域继续展开搜救动作,以提高搜救成功率,并且当前方发现搜救目标后,电能补给机器人协同遗留下的搜救机器人共同赶赴目标位置,通过大量机器人在目标位置协同工作,提高了搜救效率,最大限度争取有效的搜救时间,并且加入电能补给

基于GPS和UWB混合定位的自动搜救机器人设计.docx
基于GPS和UWB混合定位的自动搜救机器人设计标题:基于GPS和UWB混合定位的自动搜救机器人设计摘要:自动搜救机器人在紧急救援和灾害现场具有重要作用。然而,传统的GPS定位在特定环境下存在定位偏差,导致救援效果下降。因此,本论文提出了一种基于GPS和UWB混合定位的自动搜救机器人设计方案。通过结合这两种定位技术,能够提高定位精度和抗干扰能力,从而改善紧急救援任务的效率和准确性。实验结果表明,该方案能够有效实现自动搜救机器人的定位和路径规划,为应对紧急事件提供强有力的支持。关键词:自动搜救机器人,GPS,