
一种基于干扰观测器的主动型膝上假肢终端滑模控制方法.pdf

宜然****找我


1/10
2/10

3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于干扰观测器的主动型膝上假肢终端滑模控制方法.pdf
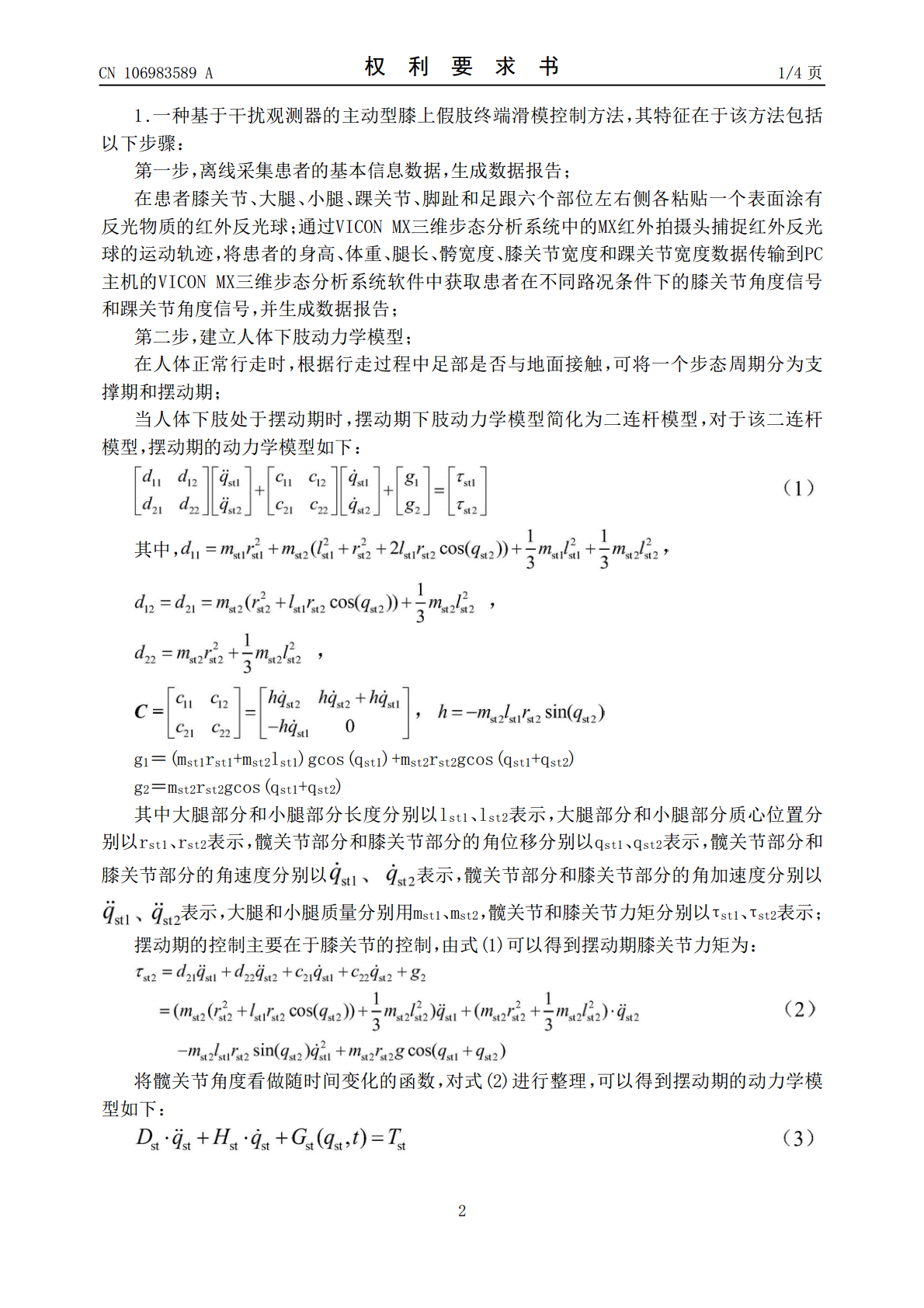
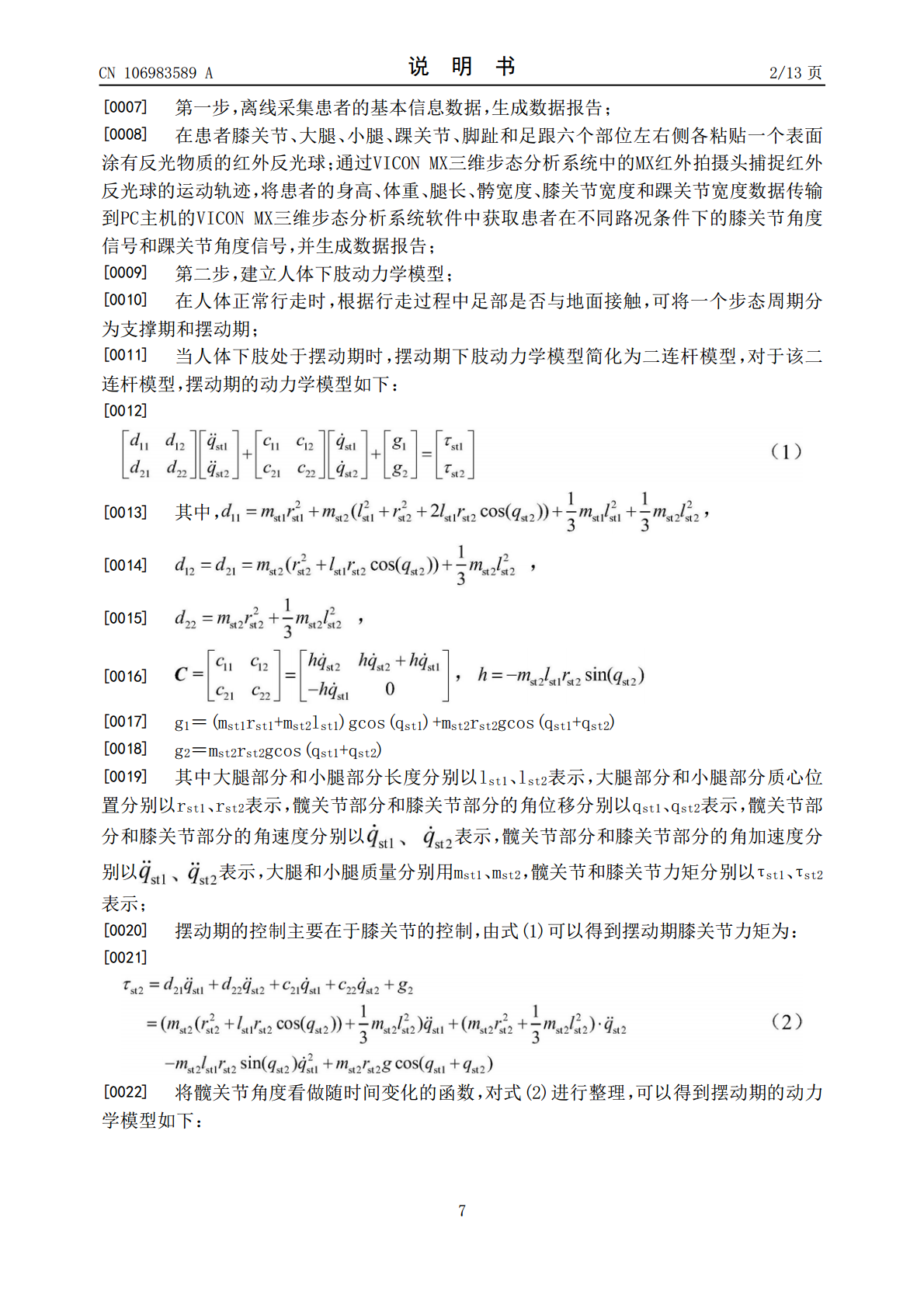
本发明公开了一种基于干扰观测器的主动型膝上假肢终端滑模控制方法。该方法离线采集患者的基本信息数据,生成数据报告;在不改变基本构造和相互作用方式的前提下,将人体下肢简化为二连杆模型进行分析,针对人体行走过程中摆动期和支撑期的运动形式的差异,得出支撑期和摆动期的下肢动力学模型;对下肢动力学模型设计干扰观测器和终端滑模控制器。该方法将滑模变结构控制理论引入到主动型膝上假肢的控制中,在保留了传统滑模控制的抗干扰能力和快速响应等优点的同时,削弱了控制量的抖振程度,使模型系统的跟踪误差能够在有限时间内收敛到零。该方法

基于滑模干扰观测器的机械臂终端滑模控制.docx
基于滑模干扰观测器的机械臂终端滑模控制基于滑模干扰观测器的机械臂终端滑模控制摘要:机械臂广泛应用于工业生产中的装配、搬运、焊接等任务。然而,由于机械臂的多自由度和非线性特性,其控制问题具有一定的挑战性。为了提高机械臂的控制性能,本文提出了一种基于滑模干扰观测器的机械臂终端滑模控制方法。该方法通过引入滑模干扰观测器,实现对非线性干扰的在线估计和抵消,从而提高了机械臂系统的鲁棒性和控制精度。通过仿真实验证明了该方法的有效性和优越性。关键词:滑模控制;机械臂;滑模干扰观测器;控制精度;鲁棒性1.引言机械臂是一种

基于干扰观测器的AUV深度自适应终端滑模控制.pptx
汇报人:目录PARTONEPARTTWO干扰观测器的原理干扰观测器的实现干扰观测器的性能评估PARTTHREE自适应终端滑模控制算法的原理自适应终端滑模控制算法的实现自适应终端滑模控制算法的性能评估PARTFOURAUV深度自适应终端滑模控制的原理AUV深度自适应终端滑模控制的实现AUV深度自适应终端滑模控制的效果评估PARTFIVE实验环境与条件实验过程与结果实验结果的分析与讨论PARTSIXAUV深度自适应终端滑模控制的应用前景AUV深度自适应终端滑模控制的挑战与问题AUV深度自适应终端滑模控制的未来

基于干扰观测器的解耦时变快速终端滑模控制.pptx
汇报人:目录PARTONEPARTTWO干扰观测器的原理干扰观测器的实现方法干扰观测器的性能分析PARTTHREE解耦控制的原理解耦控制的设计方法解耦控制的性能分析PARTFOUR时变快速终端滑模控制的原理时变快速终端滑模控制的设计方法时变快速终端滑模控制的性能分析PARTFIVE算法的原理及构成算法的实现流程算法的仿真验证与性能评估PARTSIX应用场景介绍与传统方法的比较优势潜在的应用领域与发展前景THANKYOU

基于非线性干扰观测器的自动弹仓终端滑模控制.pptx
基于非线性干扰观测器的自动弹仓终端滑模控制目录添加章节标题非线性干扰观测器的原理干扰观测器的设计观测器对非线性干扰的估计观测器的稳定性分析观测器的性能评估自动弹仓系统的滑模控制滑模控制的基本原理滑模面的设计滑模控制器的设计滑模控制器的稳定性分析非线性干扰观测器在自动弹仓系统中的应用非线性干扰的来源和影响干扰观测器在自动弹仓系统中的实现观测器对自动弹仓系统性能的提升实验验证和结果分析基于非线性干扰观测器的自动弹仓终端滑模控制的优势和局限性优势分析局限性分析未来研究方向和展望实际应用和案例分析实际应用场景和案