
一种基于多旋翼无人机的涵道推进系统.pdf

淑然****by


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于多旋翼无人机的涵道推进系统.pdf
本发明公开了一种基于多旋翼无人机的涵道推进系统,属于无人机技术领域;该系统包括多旋翼无人机、云台接口Ⅰ、涵道升力模块和云台接口Ⅱ。多旋翼无人机与云台接口Ⅰ通过刚性连接,云台接口Ⅰ的下部与涵道升力模块通过刚性连接;云台接口Ⅱ的上部与涵道升力模块通过刚性连接,云台接口Ⅱ的下部设有预留接口,预留接口能够与所搭载的云台或其他设备连接。本发明使用通用的云台接口,可以与多种型号的消费级多旋翼无人机进行刚性机械结合,并且可以根据不同载重需求搭载不同涵道或电池以提高最大升力,不需要加装复杂的涵道控制系统,有很大的改装潜力
涵道式多旋翼无人机.pdf
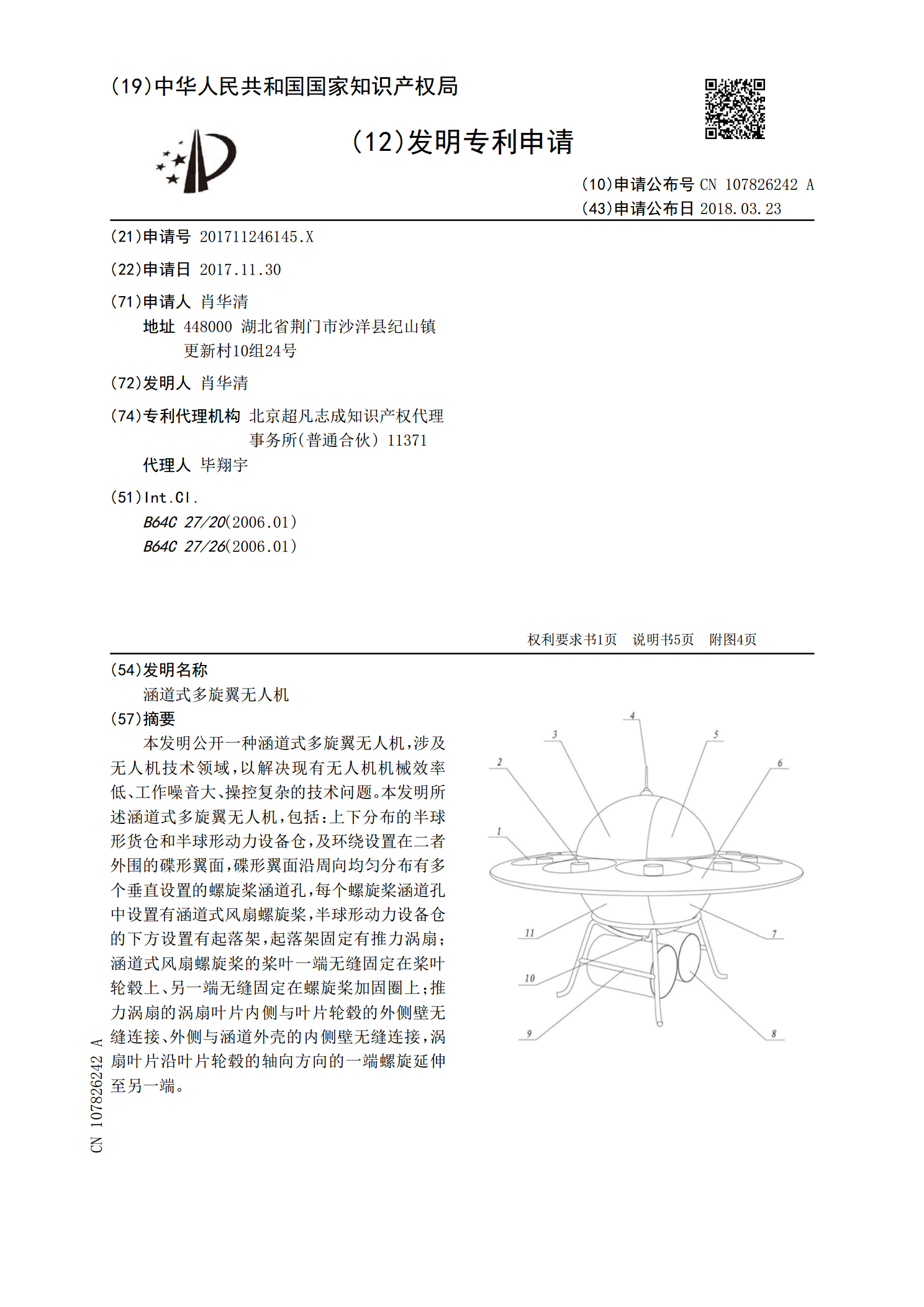
本发明公开一种涵道式多旋翼无人机,涉及无人机技术领域,以解决现有无人机机械效率低、工作噪音大、操控复杂的技术问题。本发明所述涵道式多旋翼无人机,包括:上下分布的半球形货仓和半球形动力设备仓,及环绕设置在二者外围的碟形翼面,碟形翼面沿周向均匀分布有多个垂直设置的螺旋桨涵道孔,每个螺旋桨涵道孔中设置有涵道式风扇螺旋桨,半球形动力设备仓的下方设置有起落架,起落架固定有推力涡扇;涵道式风扇螺旋桨的桨叶一端无缝固定在桨叶轮毂上、另一端无缝固定在螺旋桨加固圈上;推力涡扇的涡扇叶片内侧与叶片轮毂的外侧壁无缝连接、外侧与

一种电动式涵道旋翼无人机.pdf
一种电动式涵道旋翼无人机,它涉及一种无人机。传统涵道式无人机使用缠绕机缠绕式涵道,这种类型的涵道式无人机的质量重、结构固定、成本高且结构设计不合理,同时驱动方式落后。本发明中多个第一塑料圆环和多个第二塑料圆环同轴设置且交替连接形成涵道本体,多个轴向支架设在涵道本体上,每个轴向支架的顶部与上支撑架相连接,螺旋桨、导流片用支架和舵机用支架从上至下依次套装在电机的输出轴上,多个导流片设在导流片用支架上,每个导流片的两端分别与导流片用支架和涵道本体的内壁可拆卸连接,多个舵片设在舵机用支架上,每个舵片的两端分别与舵

基于锥齿轮传动的双旋翼涵道系统.pdf
本发明公开涉及涵道式旋翼无人机技术领域,具体涉及一种基于锥齿轮传动的双旋翼涵道系统,其包括第一旋翼机构、第二旋翼机构、涵道、锥齿轮、电机输入轴、多个支撑辅助齿轮、多根辅助支撑轴,第一旋翼机构包括第一齿轮以及位于第一齿轮中间的第一旋翼,第二旋翼机构包括第二齿轮以及位于第二齿轮中间的第二旋翼,该双旋翼涵道系统通过电机带动锥齿轮旋转,锥齿轮同时带动第一齿轮、第二齿轮旋转,也即是第一旋翼与第二旋翼旋转且两者旋转的方向相反,同时第一旋翼与第二旋翼通过连接轴连接在一起,第一旋翼与第二旋翼实现同速反转,能够有效地消除第

涵道共轴双旋翼无人机系统设计及实验的开题报告.docx
涵道共轴双旋翼无人机系统设计及实验的开题报告一、选题背景无人机已经成为现代航空领域的重要组成部分,随着技术的不断发展,无人机的种类和应用范围也越来越广泛。其中,双旋翼无人机由于其独特的设计和性能优势,越来越受到人们的关注和青睐。本课题选取了涵道共轴双旋翼无人机系统作为研究对象,旨在对其进行系统设计和实验研究,探究其飞行控制和动力系统等方面的技术问题,并为无人机应用提供技术支持和参考。二、研究内容1.涵道共轴双旋翼无人机的系统设计首先,需要对涵道共轴双旋翼无人机的系统架构和主要组件进行设计和分析。其中包括机