
基于锥齿轮传动的双旋翼涵道系统.pdf

一条****88


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于锥齿轮传动的双旋翼涵道系统.pdf
本发明公开涉及涵道式旋翼无人机技术领域,具体涉及一种基于锥齿轮传动的双旋翼涵道系统,其包括第一旋翼机构、第二旋翼机构、涵道、锥齿轮、电机输入轴、多个支撑辅助齿轮、多根辅助支撑轴,第一旋翼机构包括第一齿轮以及位于第一齿轮中间的第一旋翼,第二旋翼机构包括第二齿轮以及位于第二齿轮中间的第二旋翼,该双旋翼涵道系统通过电机带动锥齿轮旋转,锥齿轮同时带动第一齿轮、第二齿轮旋转,也即是第一旋翼与第二旋翼旋转且两者旋转的方向相反,同时第一旋翼与第二旋翼通过连接轴连接在一起,第一旋翼与第二旋翼实现同速反转,能够有效地消除第
锥齿轮-圆柱齿轮两次功率分流的共轴式双旋翼传动装置.pdf
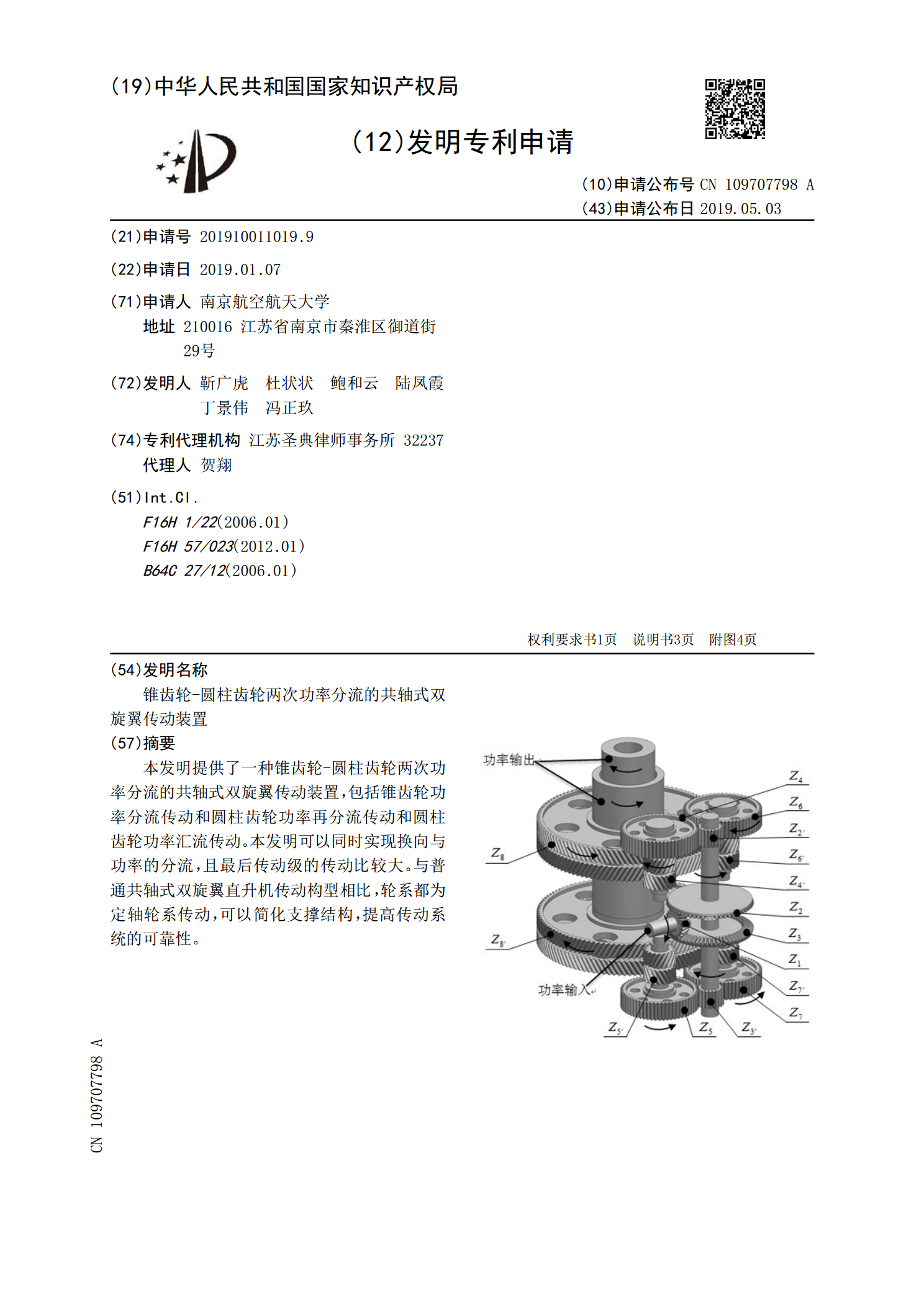
本发明提供了一种锥齿轮‑圆柱齿轮两次功率分流的共轴式双旋翼传动装置,包括锥齿轮功率分流传动和圆柱齿轮功率再分流传动和圆柱齿轮功率汇流传动。本发明可以同时实现换向与功率的分流,且最后传动级的传动比较大。与普通共轴式双旋翼直升机传动构型相比,轮系都为定轴轮系传动,可以简化支撑结构,提高传动系统的可靠性。

涵道共轴双旋翼无人机系统设计及实验的开题报告.docx
涵道共轴双旋翼无人机系统设计及实验的开题报告一、选题背景无人机已经成为现代航空领域的重要组成部分,随着技术的不断发展,无人机的种类和应用范围也越来越广泛。其中,双旋翼无人机由于其独特的设计和性能优势,越来越受到人们的关注和青睐。本课题选取了涵道共轴双旋翼无人机系统作为研究对象,旨在对其进行系统设计和实验研究,探究其飞行控制和动力系统等方面的技术问题,并为无人机应用提供技术支持和参考。二、研究内容1.涵道共轴双旋翼无人机的系统设计首先,需要对涵道共轴双旋翼无人机的系统架构和主要组件进行设计和分析。其中包括机

一种锥齿轮传动的双环辊旋轧机构.pdf
本发明公开一种锥齿轮传动的双环辊旋轧机构,包括环辊组件,机架,底板座和传动组件;环辊组件设置有两组,对称安装于机架内;机架设置于底板座上方,并与底板座转动连接;传动组件设置有两组且固定设置于机架上;传动组件贯穿机架并与环辊组件的从动锥齿轮啮合。本发明采用双环辊结构,有效的抵消环辊对工件的横向力和附加力矩;反向利用了锥齿轮啮合原理,采用从动齿轮整体绕主动齿轮旋转的方法,将环辊支架的摆动与主、从动齿轮的啮合关系结合在一起,解决了送进角的调整与换辊传动的干涉和空间布局问题,使机构布局紧凑、节省空间且调整原理巧妙

一种基于多旋翼无人机的涵道推进系统.pdf
本发明公开了一种基于多旋翼无人机的涵道推进系统,属于无人机技术领域;该系统包括多旋翼无人机、云台接口Ⅰ、涵道升力模块和云台接口Ⅱ。多旋翼无人机与云台接口Ⅰ通过刚性连接,云台接口Ⅰ的下部与涵道升力模块通过刚性连接;云台接口Ⅱ的上部与涵道升力模块通过刚性连接,云台接口Ⅱ的下部设有预留接口,预留接口能够与所搭载的云台或其他设备连接。本发明使用通用的云台接口,可以与多种型号的消费级多旋翼无人机进行刚性机械结合,并且可以根据不同载重需求搭载不同涵道或电池以提高最大升力,不需要加装复杂的涵道控制系统,有很大的改装潜力