
一种无人机载升降机构到位控制装置及方法.pdf

是笛****加盟

1/9

2/9

3/9

4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种无人机载升降机构到位控制装置及方法.pdf
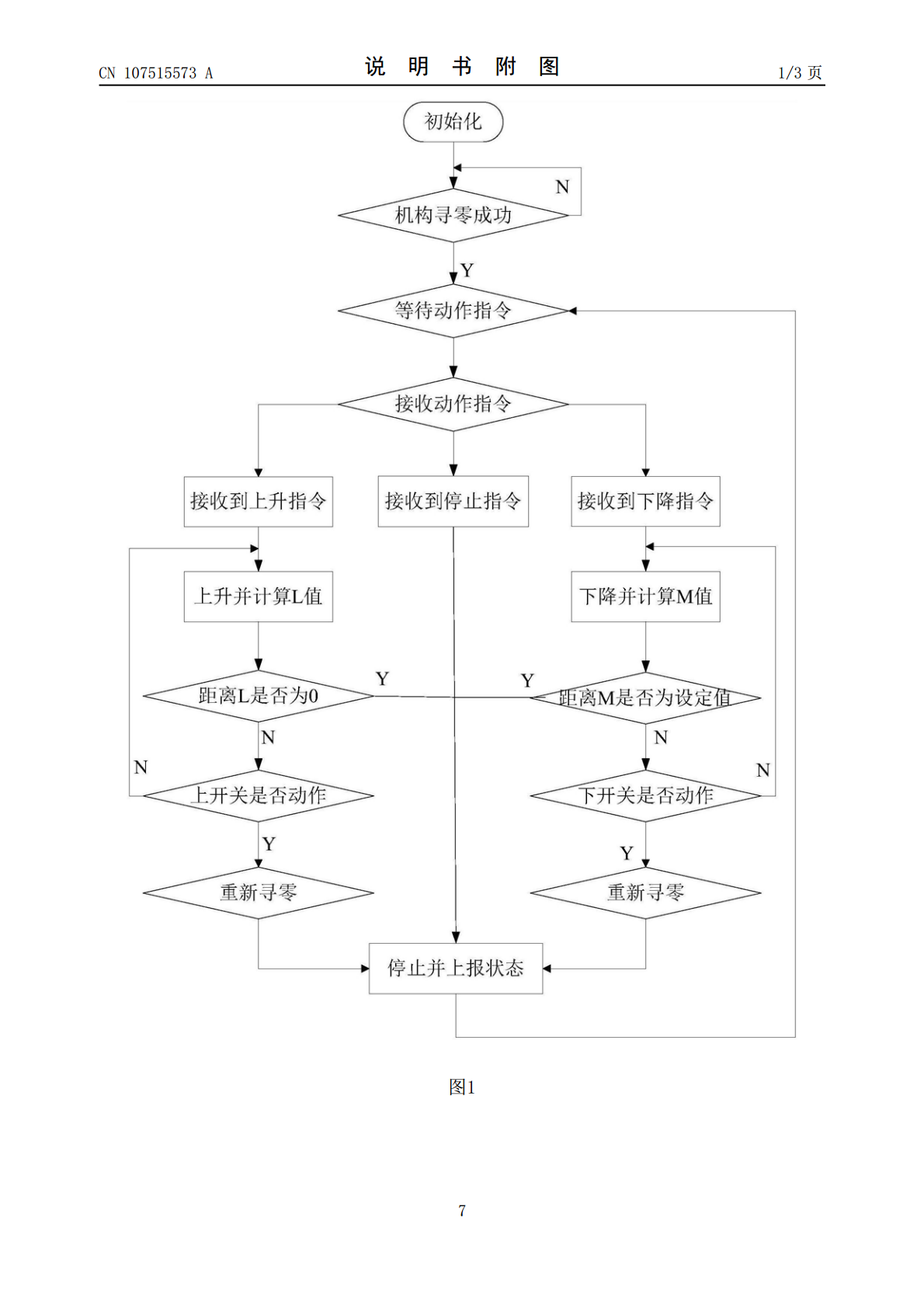
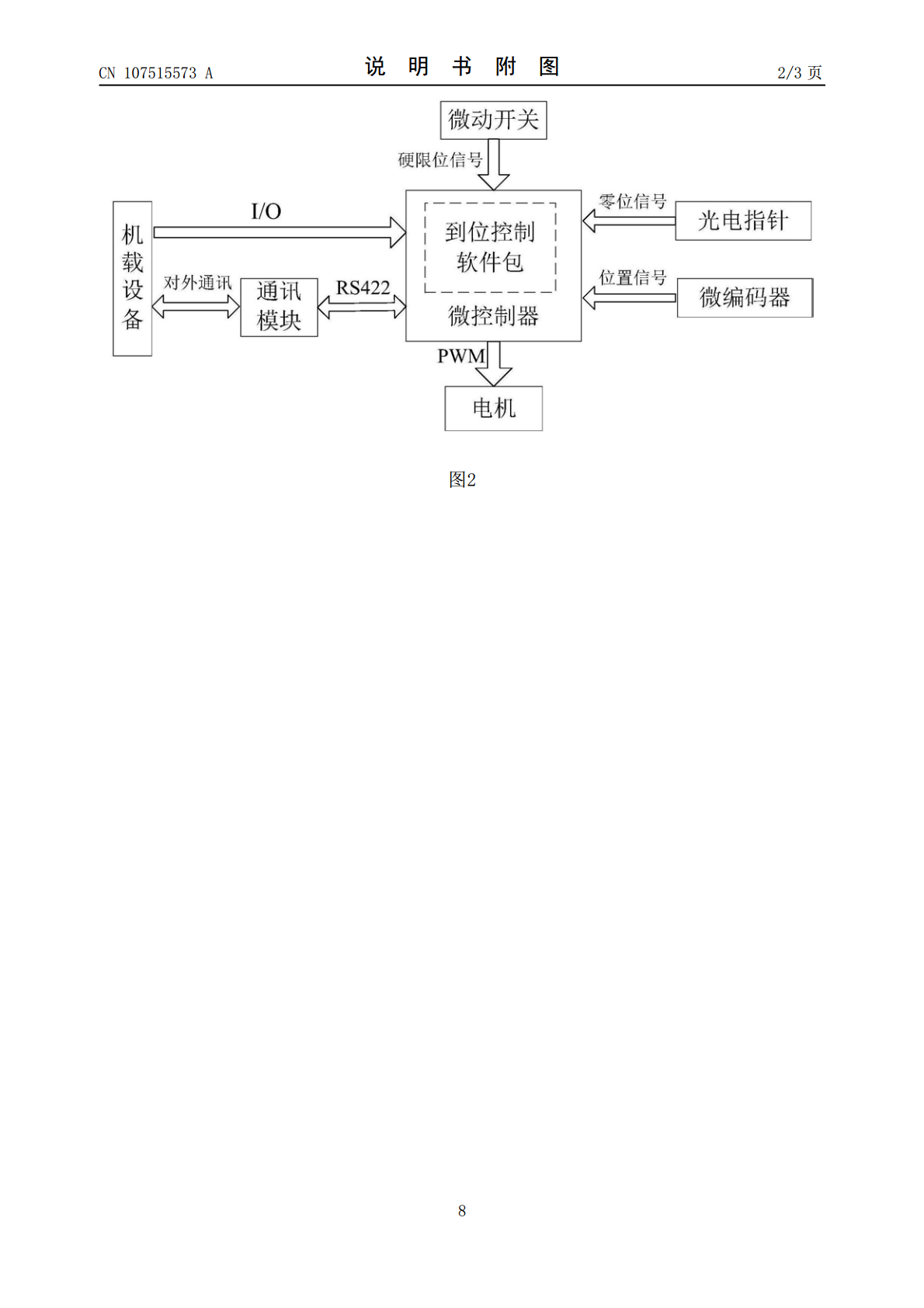
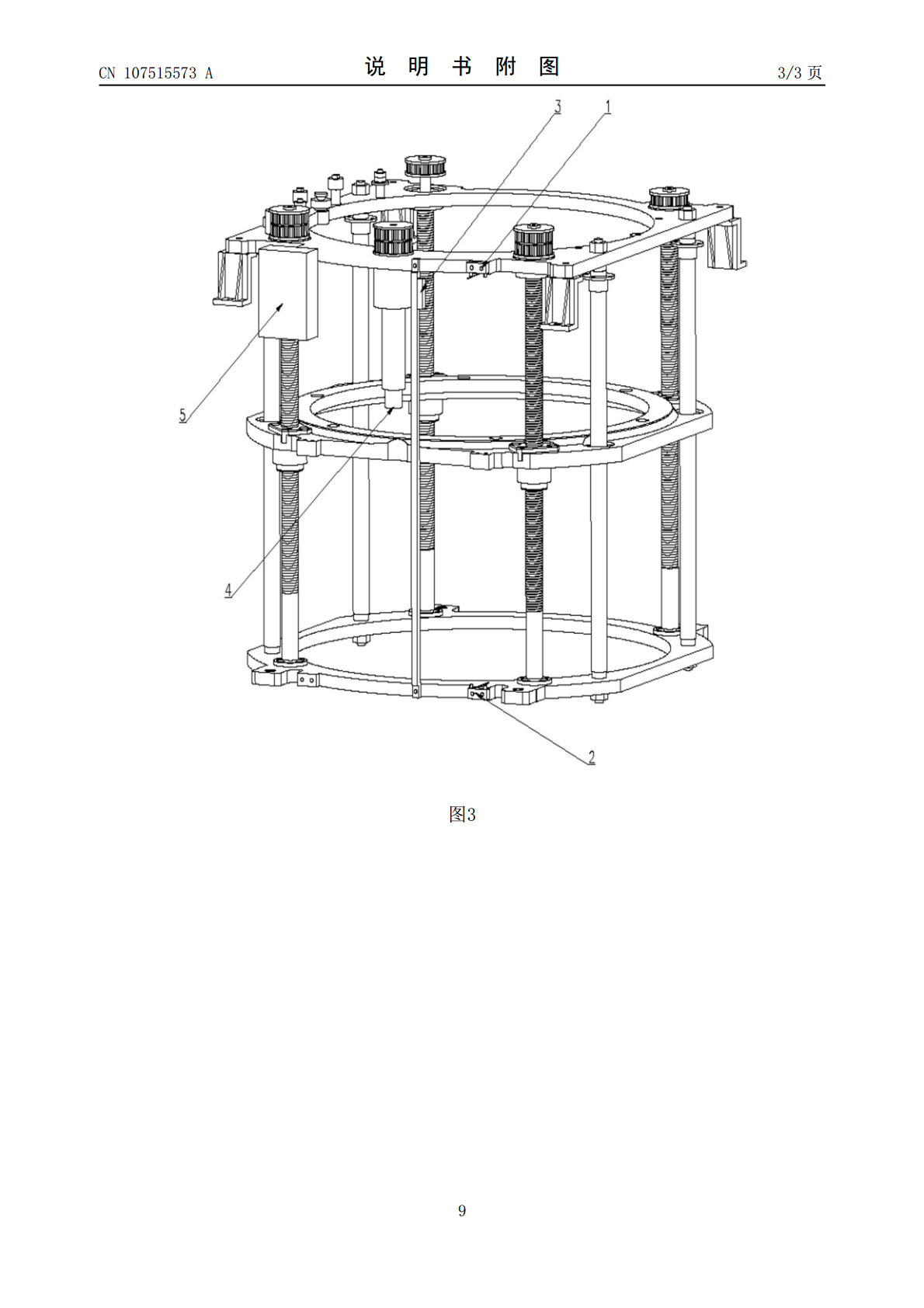
本发明公开了一种无人机载升降机构到位控制方法及装置,升降机构共分为三层,上下层为安装固定层,中间层为运动层。本发明保留在上下层放置的微动开关,另外在升降机构上层放置一个光电指针,同时控制电机末端增置一个微型光电编码器。微动开关作为升降机构机械限位而存在,而升降机构软限位通过光电指针和光电编码器配合实现。本发明意在实现升降机构软限位加硬限位的控制方法。该方法能够快速获知中间层实时运动位置、当前运动状态、机构故障与否等重要信息,通过检测机构总电流的量值来快速发现机构卡死,从而进行相应动作,有效避免卡死带来的“
一种无人机机载监测控制装置及控制方法.pdf
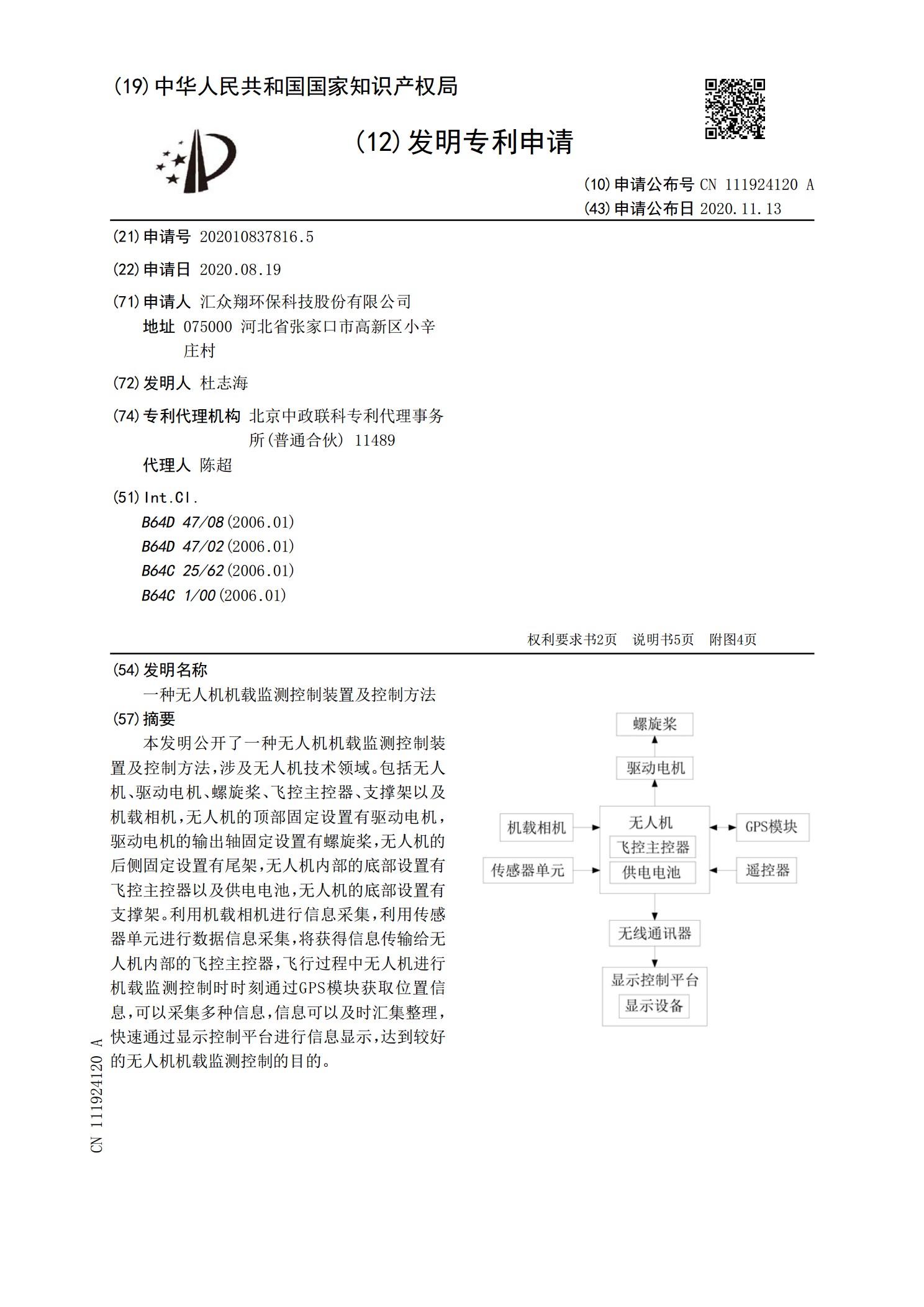
本发明公开了一种无人机机载监测控制装置及控制方法,涉及无人机技术领域。包括无人机、驱动电机、螺旋桨、飞控主控器、支撑架以及机载相机,无人机的顶部固定设置有驱动电机,驱动电机的输出轴固定设置有螺旋桨,无人机的后侧固定设置有尾架,无人机内部的底部设置有飞控主控器以及供电电池,无人机的底部设置有支撑架。利用机载相机进行信息采集,利用传感器单元进行数据信息采集,将获得信息传输给无人机内部的飞控主控器,飞行过程中无人机进行机载监测控制时时刻通过GPS模块获取位置信息,可以采集多种信息,信息可以及时汇集整理,快速通过
一种平稳升降的无人机装置及控制方法.pdf
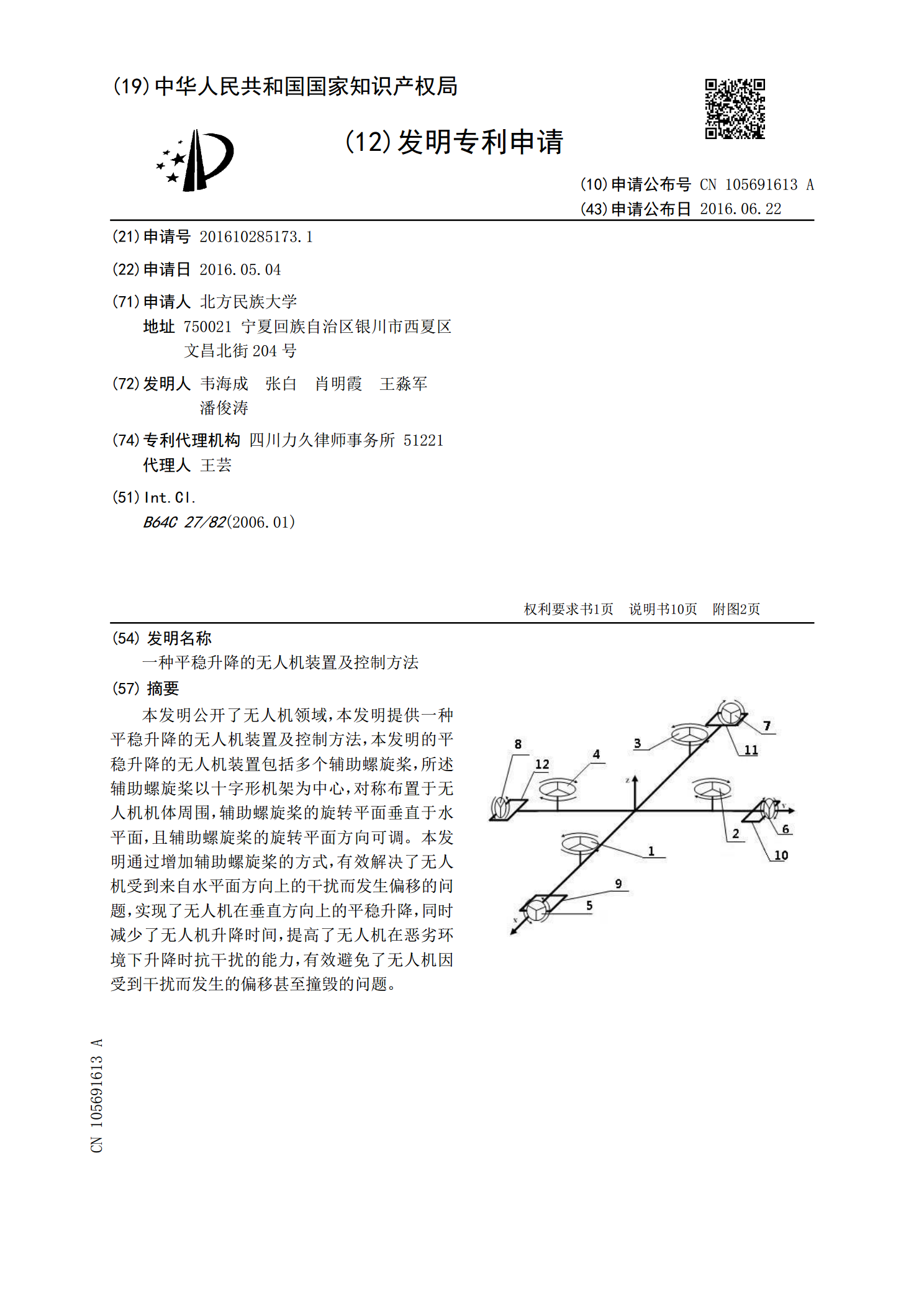
本发明公开了无人机领域,本发明提供一种平稳升降的无人机装置及控制方法,本发明的平稳升降的无人机装置包括多个辅助螺旋桨,所述辅助螺旋桨以十字形机架为中心,对称布置于无人机机体周围,辅助螺旋桨的旋转平面垂直于水平面,且辅助螺旋桨的旋转平面方向可调。本发明通过增加辅助螺旋桨的方式,有效解决了无人机受到来自水平面方向上的干扰而发生偏移的问题,实现了无人机在垂直方向上的平稳升降,同时减少了无人机升降时间,提高了无人机在恶劣环境下升降时抗干扰的能力,有效避免了无人机因受到干扰而发生的偏移甚至撞毁的问题。
一种新型机载抛秧机构以及无人机抛秧装置.pdf
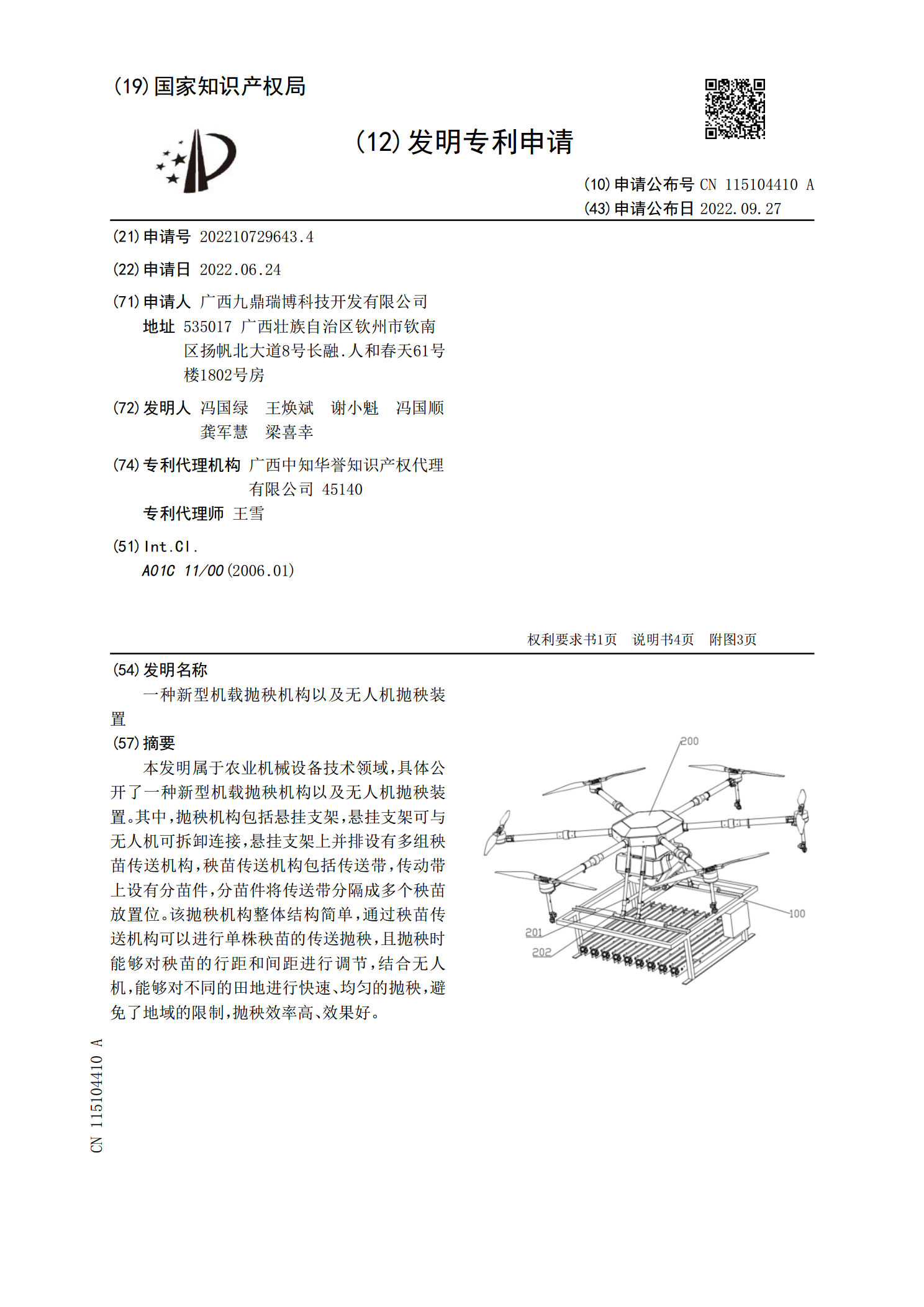
本发明属于农业机械设备技术领域,具体公开了一种新型机载抛秧机构以及无人机抛秧装置。其中,抛秧机构包括悬挂支架,悬挂支架可与无人机可拆卸连接,悬挂支架上并排设有多组秧苗传送机构,秧苗传送机构包括传送带,传动带上设有分苗件,分苗件将传送带分隔成多个秧苗放置位。该抛秧机构整体结构简单,通过秧苗传送机构可以进行单株秧苗的传送抛秧,且抛秧时能够对秧苗的行距和间距进行调节,结合无人机,能够对不同的田地进行快速、均匀的抛秧,避免了地域的限制,抛秧效率高、效果好。

一种无人机载测向装置.pdf
本发明涉及无人机技术领域,具体而言,涉及一种无人机载测向装置,包括测向主机、减振装置、天线阵和固定件;所述测向主机的顶部连接所述减振装置,所述减振装置用于与无人机连接,所述固定件的一端连接所述测向主机的底部,所述固定件的另一端连接所述天线阵;所述天线阵的重心在所述测向装置与所述无人机连接后的重心线上。测向装置挂载在无人机上,解决传统无线通信测向系统经常出现测向盲区的问题,可在高楼和地面多障碍的环境下进行测向。