
一种基于快速终端滑模的四旋翼飞行器有限时间自适应控制方法.pdf

宜然****找我


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共31页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于快速终端滑模的四旋翼飞行器有限时间自适应控制方法.pdf
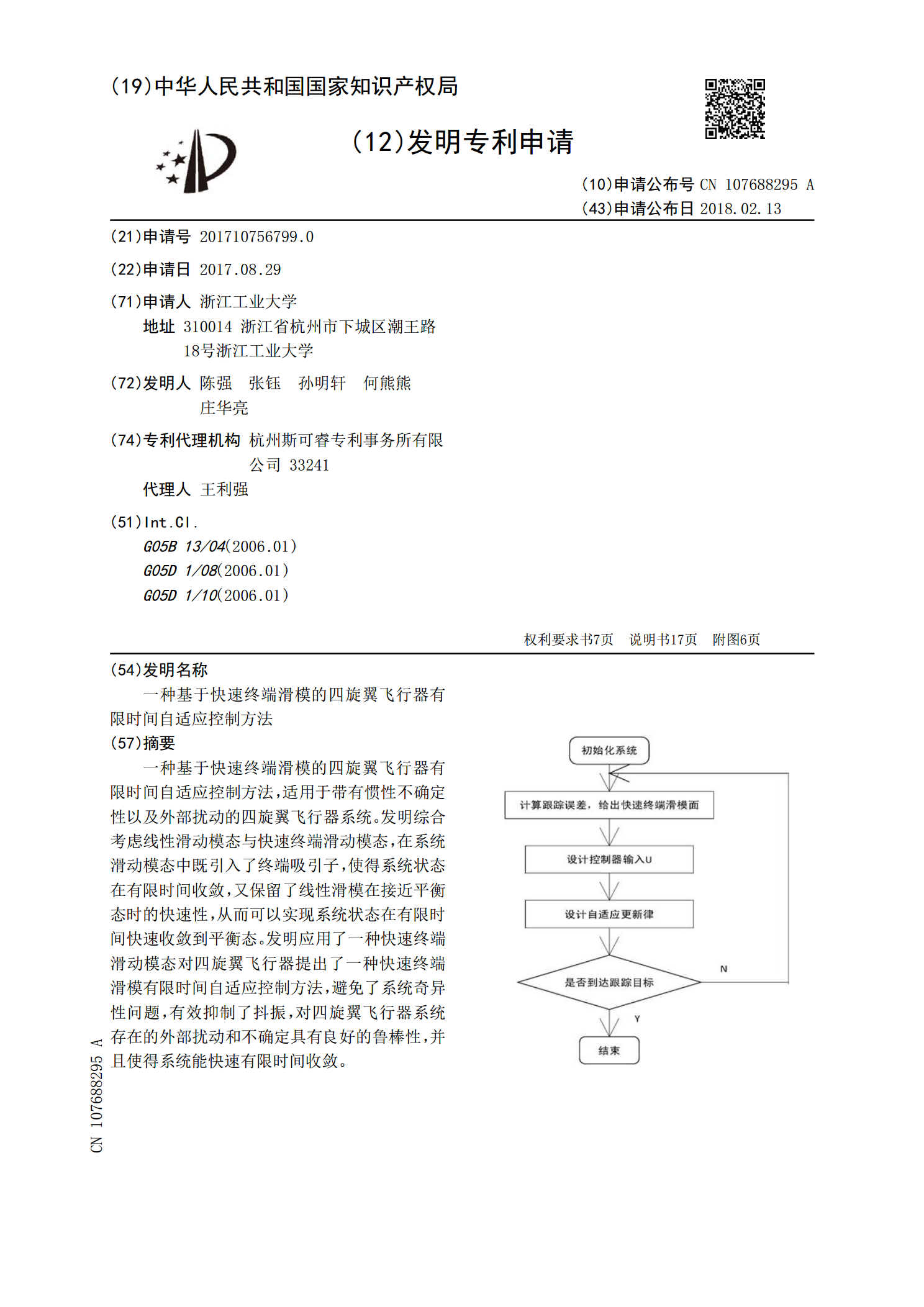
一种基于快速终端滑模的四旋翼飞行器有限时间自适应控制方法,适用于带有惯性不确定性以及外部扰动的四旋翼飞行器系统。发明综合考虑线性滑动模态与快速终端滑动模态,在系统滑动模态中既引入了终端吸引子,使得系统状态在有限时间收敛,又保留了线性滑模在接近平衡态时的快速性,从而可以实现系统状态在有限时间快速收敛到平衡态。发明应用了一种快速终端滑动模态对四旋翼飞行器提出了一种快速终端滑模有限时间自适应控制方法,避免了系统奇异性问题,有效抑制了抖振,对四旋翼飞行器系统存在的外部扰动和不确定具有良好的鲁棒性,并且使得系统能快

基于指数增强型等速趋近律和快速终端滑模面的四旋翼飞行器有限时间控制方法.pdf
一种基于指数增强型等速趋近律和快速终端滑模面的四旋翼飞行器有限时间控制方法,包括以下步骤:步骤1,确定从基于四旋翼飞行器的机体坐标系到基于地球的惯性坐标系的转移矩阵;步骤2,根据牛顿欧拉公式分析四旋翼飞行器动力学模型;步骤3,计算跟踪误差,根据快速终端滑模面以及其一阶导数设计控制器。针对四旋翼飞行器系统,结合基于指数的增强型等速趋近律滑模控制以及快速终端滑模控制,不但能在远离滑模面时能增加趋近速度,并且能减小抖振,提高系统的快速性和鲁棒性,实现快速稳定控制,同时能实现跟踪误差的有限时间控制,解决了传统滑模
基于自抗扰快速终端滑模的四旋翼无人机姿态控制方法.pdf
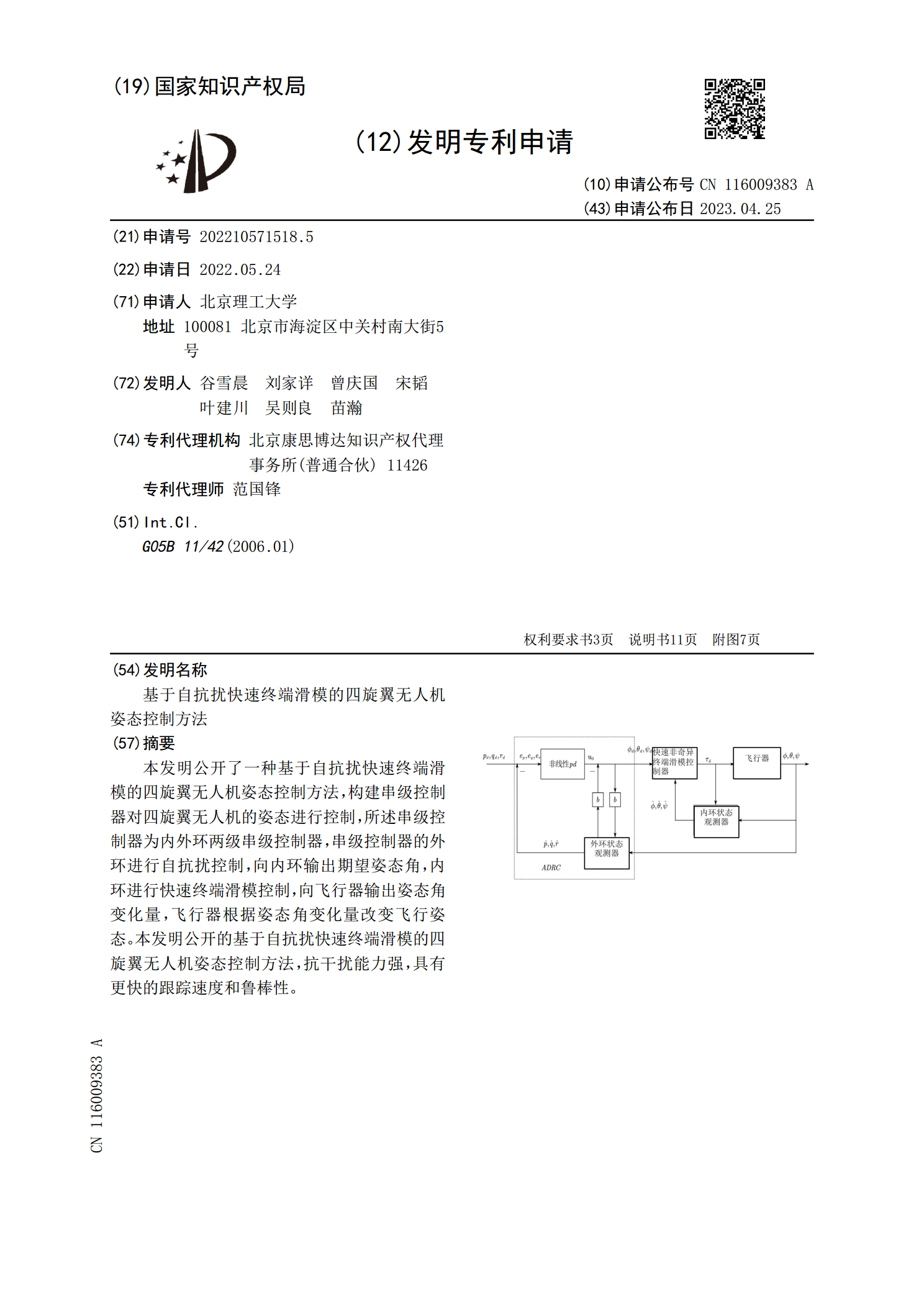
本发明公开了一种基于自抗扰快速终端滑模的四旋翼无人机姿态控制方法,构建串级控制器对四旋翼无人机的姿态进行控制,所述串级控制器为内外环两级串级控制器,串级控制器的外环进行自抗扰控制,向内环输出期望姿态角,内环进行快速终端滑模控制,向飞行器输出姿态角变化量,飞行器根据姿态角变化量改变飞行姿态。本发明公开的基于自抗扰快速终端滑模的四旋翼无人机姿态控制方法,抗干扰能力强,具有更快的跟踪速度和鲁棒性。
基于TDE的自适应超螺旋多变量快速终端滑模控制方法.pdf
本发明提出了一种基于TDE的自适应超螺旋多变量快速终端滑模控制方法,保证电缆驱动机械臂在复杂未知不确定性条件下的高精度轨迹跟踪控制。首先,设计关节的误差范围,在保证机械手安全性能的同时,保证关节位置与期望轮廓的偏差不太大,并利用时滞估计对剩余的集总系统动力学进行估计和补偿。其次,利用安全约束函数对角度错误期望进行设计分析,使不同截面的约束在统一的系统体系结构中处理;通过严格的分析,解决了带有输出约束和不确定性的机械臂运动轨迹问题。超螺旋自适应控制有效地保证了算法在满足运行中所有约束条件下的快速、准确和鲁棒

一种基于切换自适应算法的四旋翼飞行器故障容错控制方法.pdf
一种基于切换自适应算法的四旋翼飞行器故障容错控制方法,属于航空飞行器控制领域,用以解决在存在输入故障以及动力学参数未知的情况下,大机动四旋翼飞行器不能保证对期望信号良好跟踪的问题。该方法的技术要点包括构建包含未知输入故障和未知动力学参数的四旋翼飞行器分段仿射线性系统、参考系统、控制器;根据分段放射线性系统、参考系统、控制器获取误差系统模型;根据分段放射线性系统和参考系统设计基于驻留时间约束的切换信号;根据误差系统模型和切换信号获取控制器中控制参数的自适应律。本发明方法能够大机动四旋翼飞行器对期望信号良好的