
基于指数增强型等速趋近律和快速终端滑模面的四旋翼飞行器有限时间控制方法.pdf

邻家****66

1/10
2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于指数增强型等速趋近律和快速终端滑模面的四旋翼飞行器有限时间控制方法.pdf
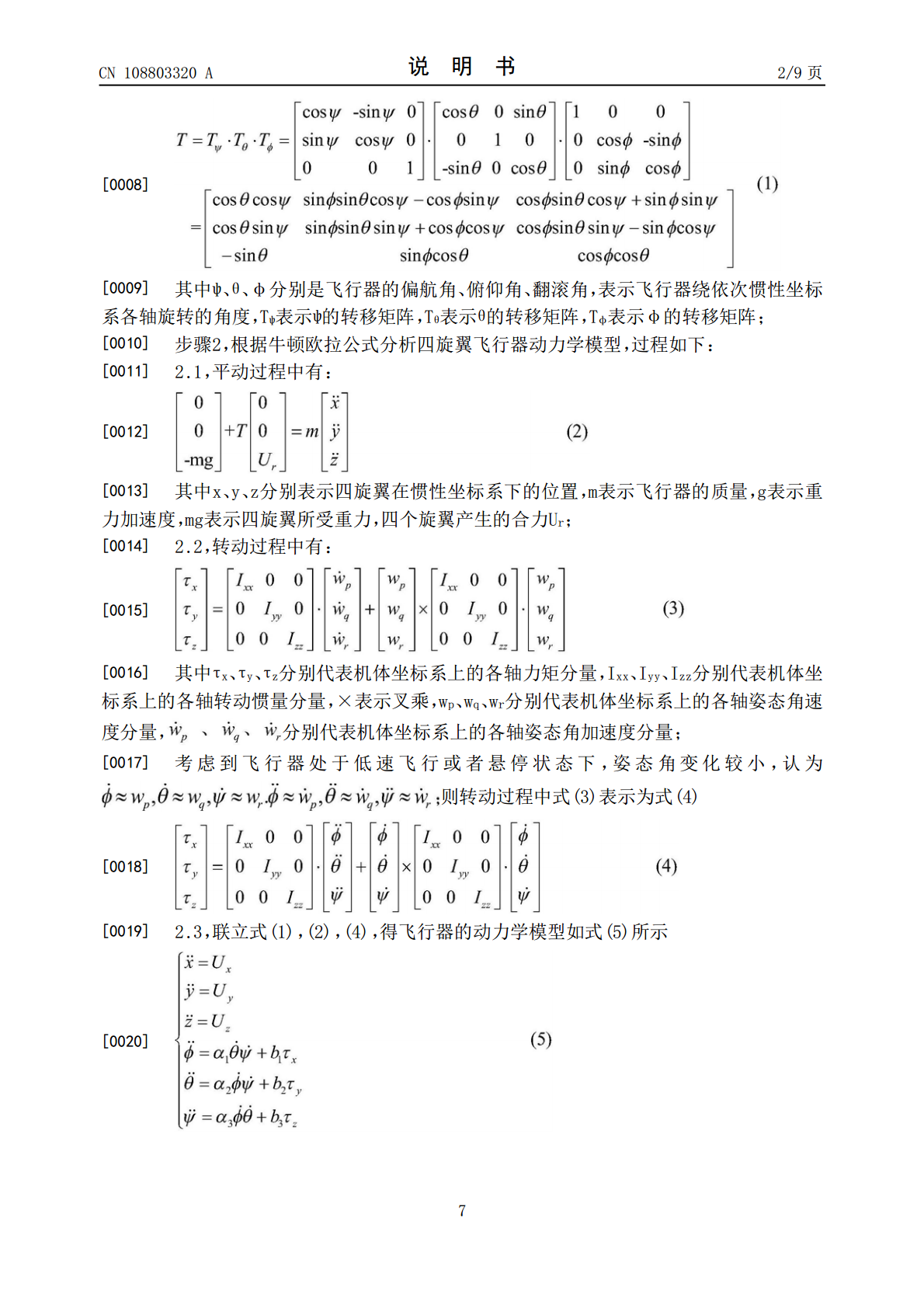
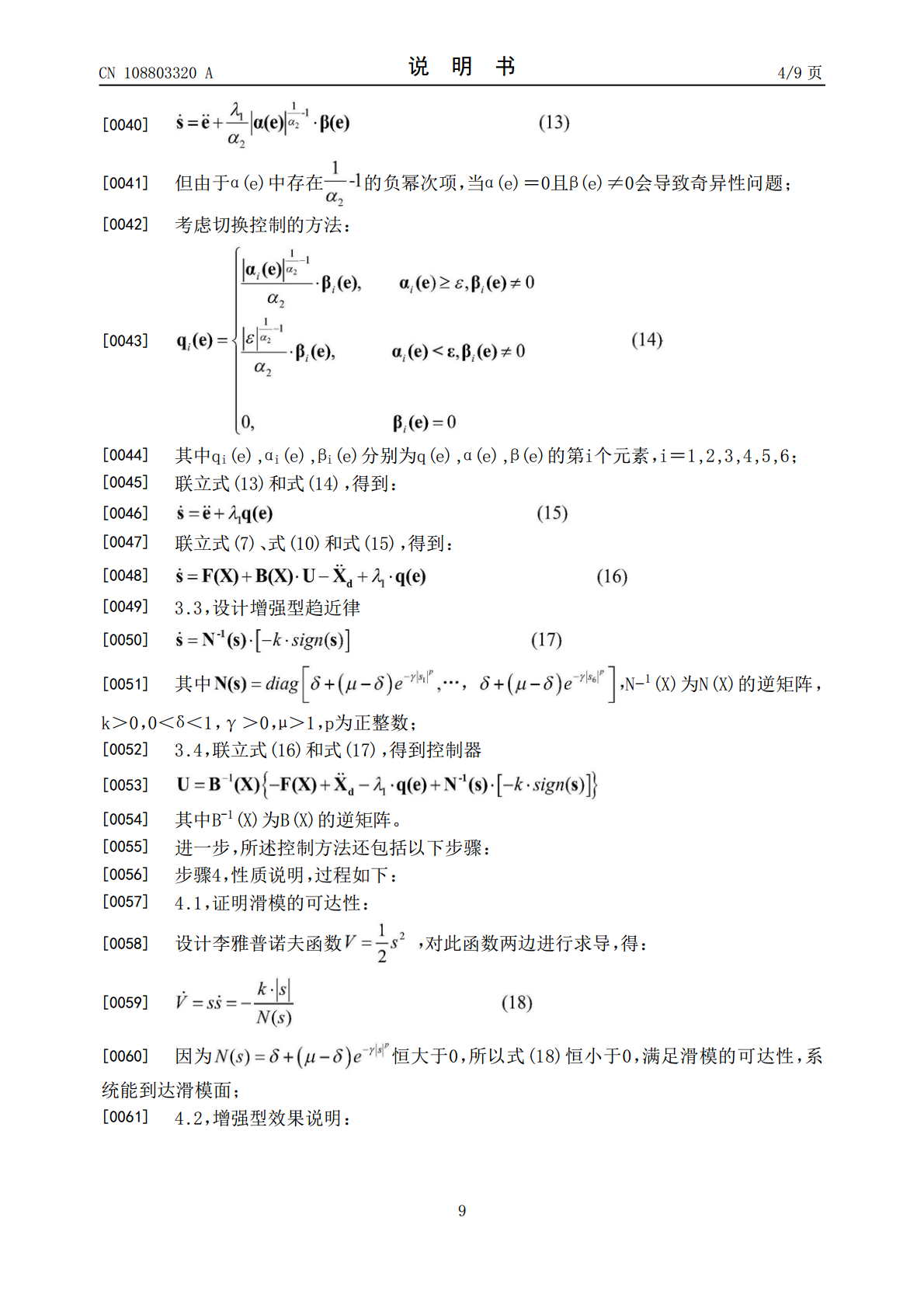
一种基于指数增强型等速趋近律和快速终端滑模面的四旋翼飞行器有限时间控制方法,包括以下步骤:步骤1,确定从基于四旋翼飞行器的机体坐标系到基于地球的惯性坐标系的转移矩阵;步骤2,根据牛顿欧拉公式分析四旋翼飞行器动力学模型;步骤3,计算跟踪误差,根据快速终端滑模面以及其一阶导数设计控制器。针对四旋翼飞行器系统,结合基于指数的增强型等速趋近律滑模控制以及快速终端滑模控制,不但能在远离滑模面时能增加趋近速度,并且能减小抖振,提高系统的快速性和鲁棒性,实现快速稳定控制,同时能实现跟踪误差的有限时间控制,解决了传统滑模
一种基于快速终端滑模的四旋翼飞行器有限时间自适应控制方法.pdf
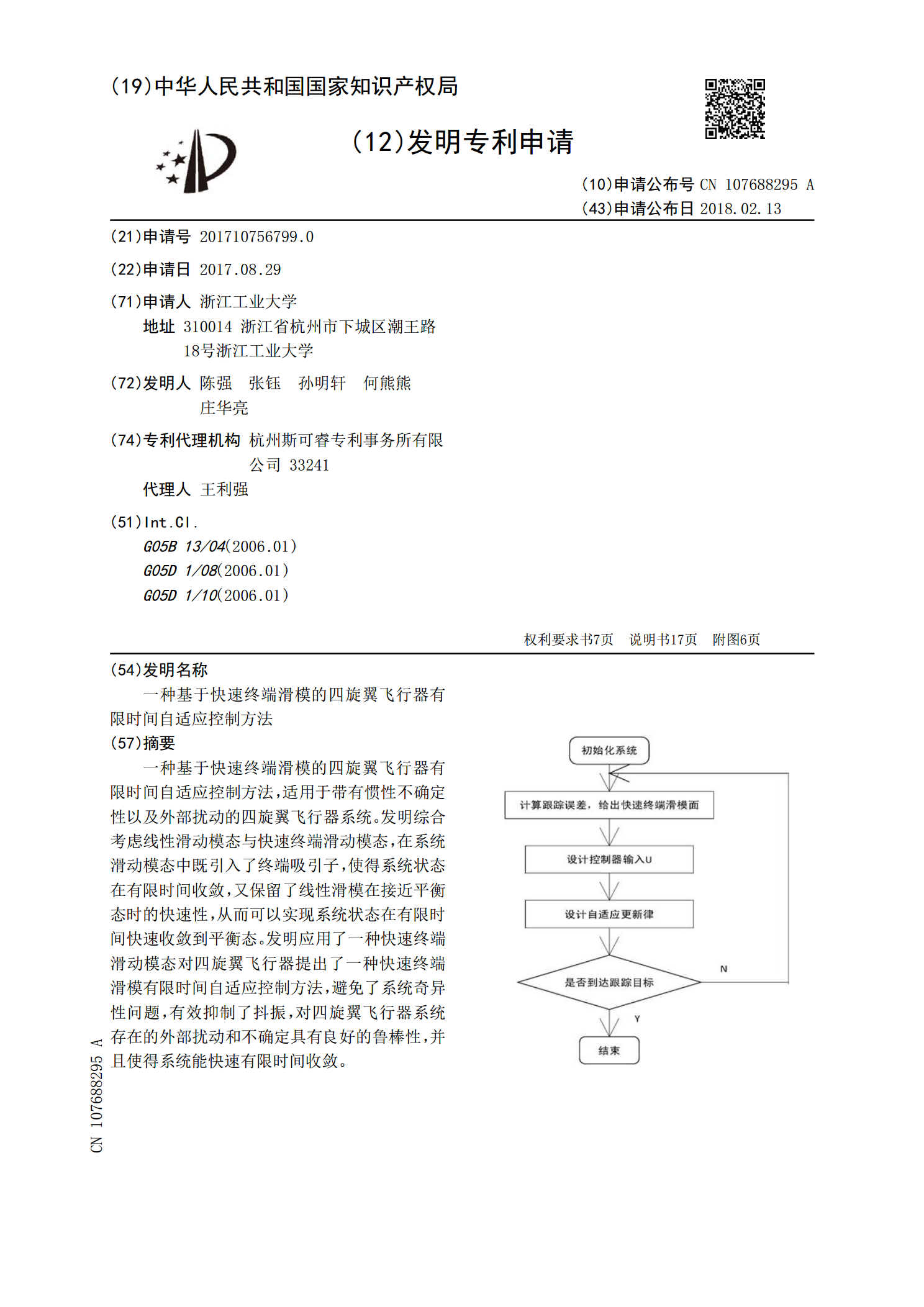
一种基于快速终端滑模的四旋翼飞行器有限时间自适应控制方法,适用于带有惯性不确定性以及外部扰动的四旋翼飞行器系统。发明综合考虑线性滑动模态与快速终端滑动模态,在系统滑动模态中既引入了终端吸引子,使得系统状态在有限时间收敛,又保留了线性滑模在接近平衡态时的快速性,从而可以实现系统状态在有限时间快速收敛到平衡态。发明应用了一种快速终端滑动模态对四旋翼飞行器提出了一种快速终端滑模有限时间自适应控制方法,避免了系统奇异性问题,有效抑制了抖振,对四旋翼飞行器系统存在的外部扰动和不确定具有良好的鲁棒性,并且使得系统能快
基于自抗扰快速终端滑模的四旋翼无人机姿态控制方法.pdf
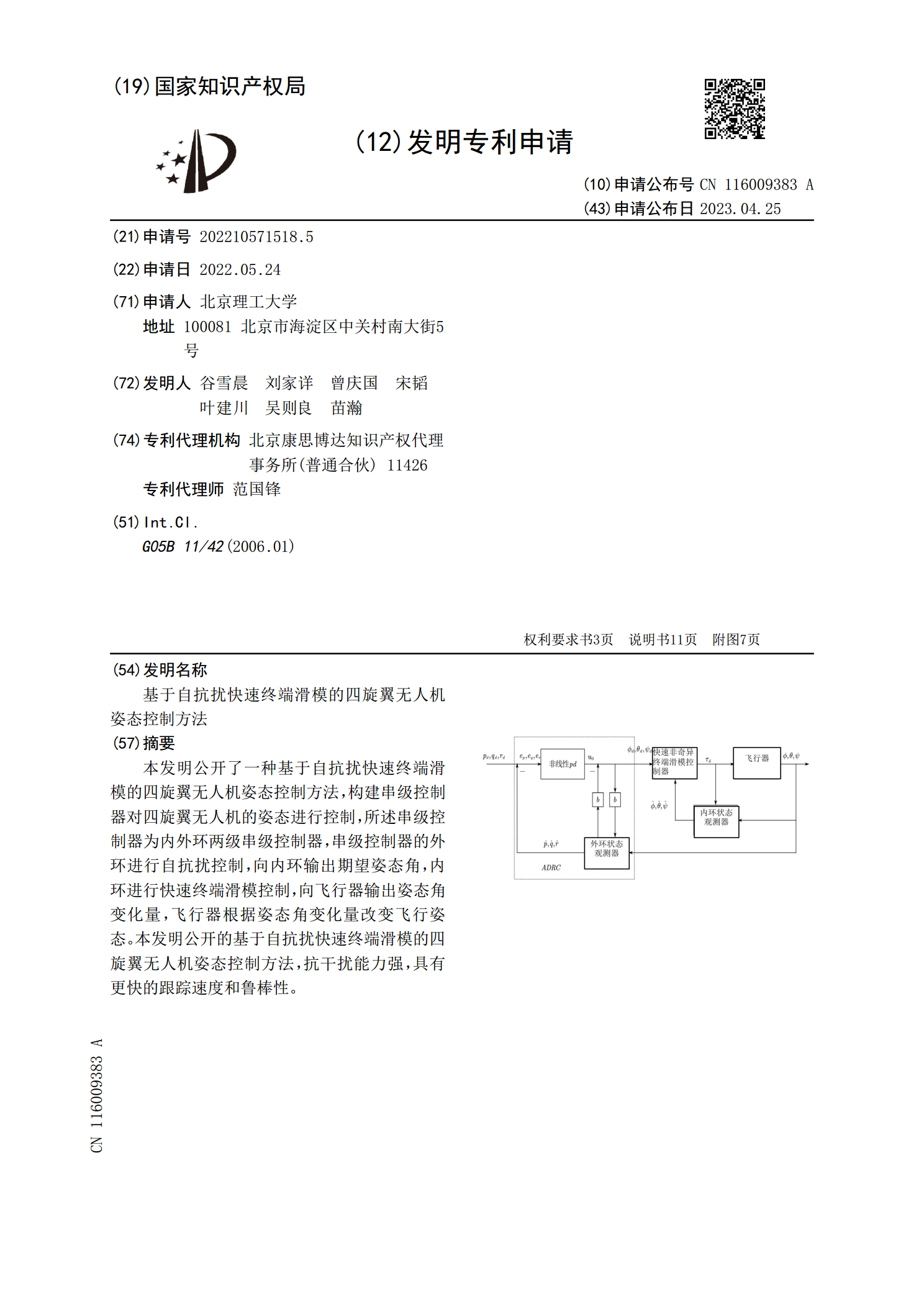
本发明公开了一种基于自抗扰快速终端滑模的四旋翼无人机姿态控制方法,构建串级控制器对四旋翼无人机的姿态进行控制,所述串级控制器为内外环两级串级控制器,串级控制器的外环进行自抗扰控制,向内环输出期望姿态角,内环进行快速终端滑模控制,向飞行器输出姿态角变化量,飞行器根据姿态角变化量改变飞行姿态。本发明公开的基于自抗扰快速终端滑模的四旋翼无人机姿态控制方法,抗干扰能力强,具有更快的跟踪速度和鲁棒性。
一种基于固定时间的变幂次指数趋近律的永磁同步电机滑模控制方法.pdf
本发明属于永磁同步电机控制技术领域,公开了一种永磁同步电机、滑模控制方法、控制系统、终端、介质,在转子同步坐标系下,将时变参数量将转化为非时变量参数,并根据电机基本特性建立永磁同步电机模型;基于固定时间的变幂次指数趋近律的永磁同步电机滑模控制策略,该控制策略包含一种可变指数系数的滑模面;设计合适趋近律,使得状态变量在固定时间收敛到滑模面;基于建立的永磁同步电机模型确定永磁同步电机控制模型,根据基于确定的控制策略以及永磁同步电机控制模型进行永磁同步电机控制。本发明的固定时间稳定性确保建立时间不依赖于初始条件
基于分数阶PID与分数阶终端滑模的四旋翼无人机控制方法.pdf
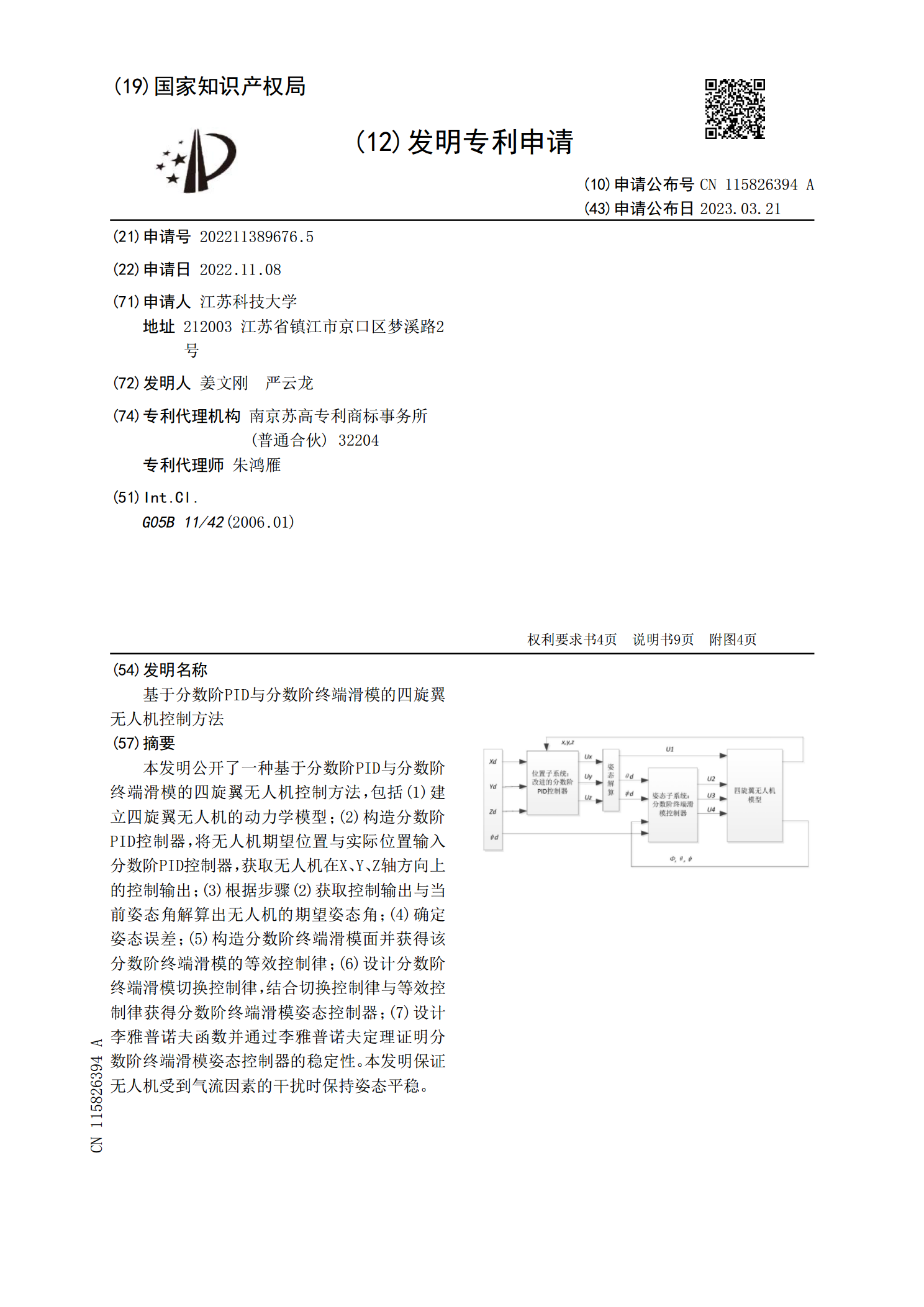
本发明公开了一种基于分数阶PID与分数阶终端滑模的四旋翼无人机控制方法,包括(1)建立四旋翼无人机的动力学模型;(2)构造分数阶PID控制器,将无人机期望位置与实际位置输入分数阶PID控制器,获取无人机在X、Y、Z轴方向上的控制输出;(3)根据步骤(2)获取控制输出与当前姿态角解算出无人机的期望姿态角;(4)确定姿态误差;(5)构造分数阶终端滑模面并获得该分数阶终端滑模的等效控制律;(6)设计分数阶终端滑模切换控制律,结合切换控制律与等效控制律获得分数阶终端滑模姿态控制器;(7)设计李雅普诺夫函数并通过李