
电动汽车制动系统研究.docx

音景****ka


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

电动汽车制动系统研究.docx
电动汽车制动系统研究1系统硬件设计本系统硬件由控制电路和驱动电路构成.其中控制电路由主MCU和监控MCU构成完成点火和踏板中断信号、驻车中断信号、踏板位移信号、轮速信号、电机反馈电流信号等输入信号的采集.驱动电路主要由电机驱动控制电路和电磁离合器驱动控制电路构成.主MCU和监控MCU通过驱动电路控制和驱动制动电机和电磁离合器.主、从MCU采用Freescale基于PowerPC构架的32位处理器MPC5604和8位处理器MC9S08DZ128.主、从MCU通过模拟开
电动汽车制动系统研究.docx
电动汽车制动系统研究1系统硬件设计本系统硬件由控制电路和驱动电路构成.其中控制电路由主MCU和监控MCU构成完成点火和踏板中断信号、驻车中断信号、踏板位移信号、轮速信号、电机反馈电流信号等输入信号的采集.驱动电路主要由电机驱动控制电路和电磁离合器驱动控制电路构成.主MCU和监控MCU通过驱动电路控制和驱动制动电机和电磁离合器.主、从MCU采用Freescale基于PowerPC构架的32位处理器MPC5604和8位处理器MC9S08DZ128.主、从MCU通过模拟开
电动汽车制动系统.pdf
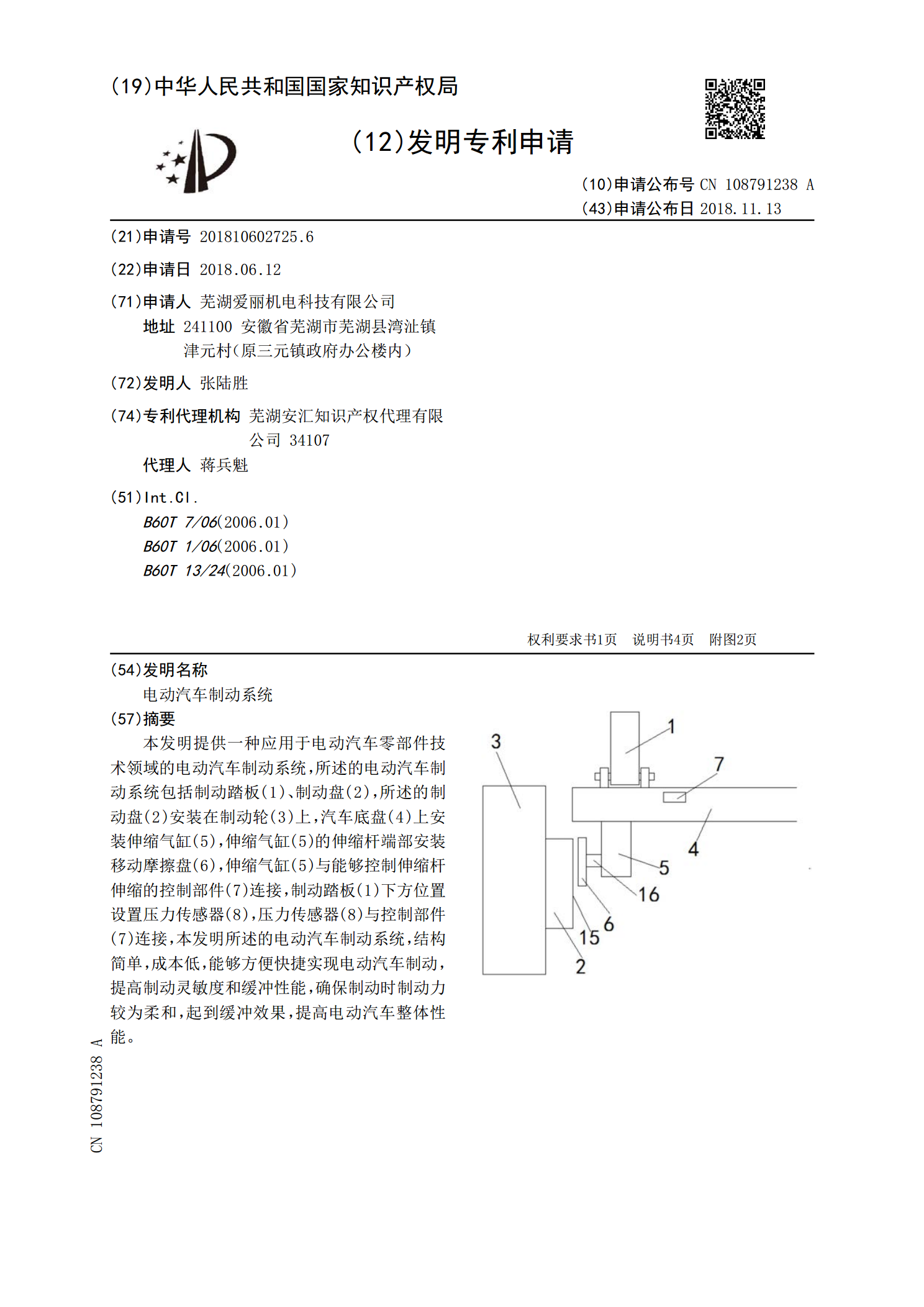
本发明提供一种应用于电动汽车零部件技术领域的电动汽车制动系统,所述的电动汽车制动系统包括制动踏板(1)、制动盘(2),所述的制动盘(2)安装在制动轮(3)上,汽车底盘(4)上安装伸缩气缸(5),伸缩气缸(5)的伸缩杆端部安装移动摩擦盘(6),伸缩气缸(5)与能够控制伸缩杆伸缩的控制部件(7)连接,制动踏板(1)下方位置设置压力传感器(8),压力传感器(8)与控制部件(7)连接,本发明所述的电动汽车制动系统,结构简单,成本低,能够方便快捷实现电动汽车制动,提高制动灵敏度和缓冲性能,确保制动时制动力较为柔和,
电动汽车的制动装置.pdf
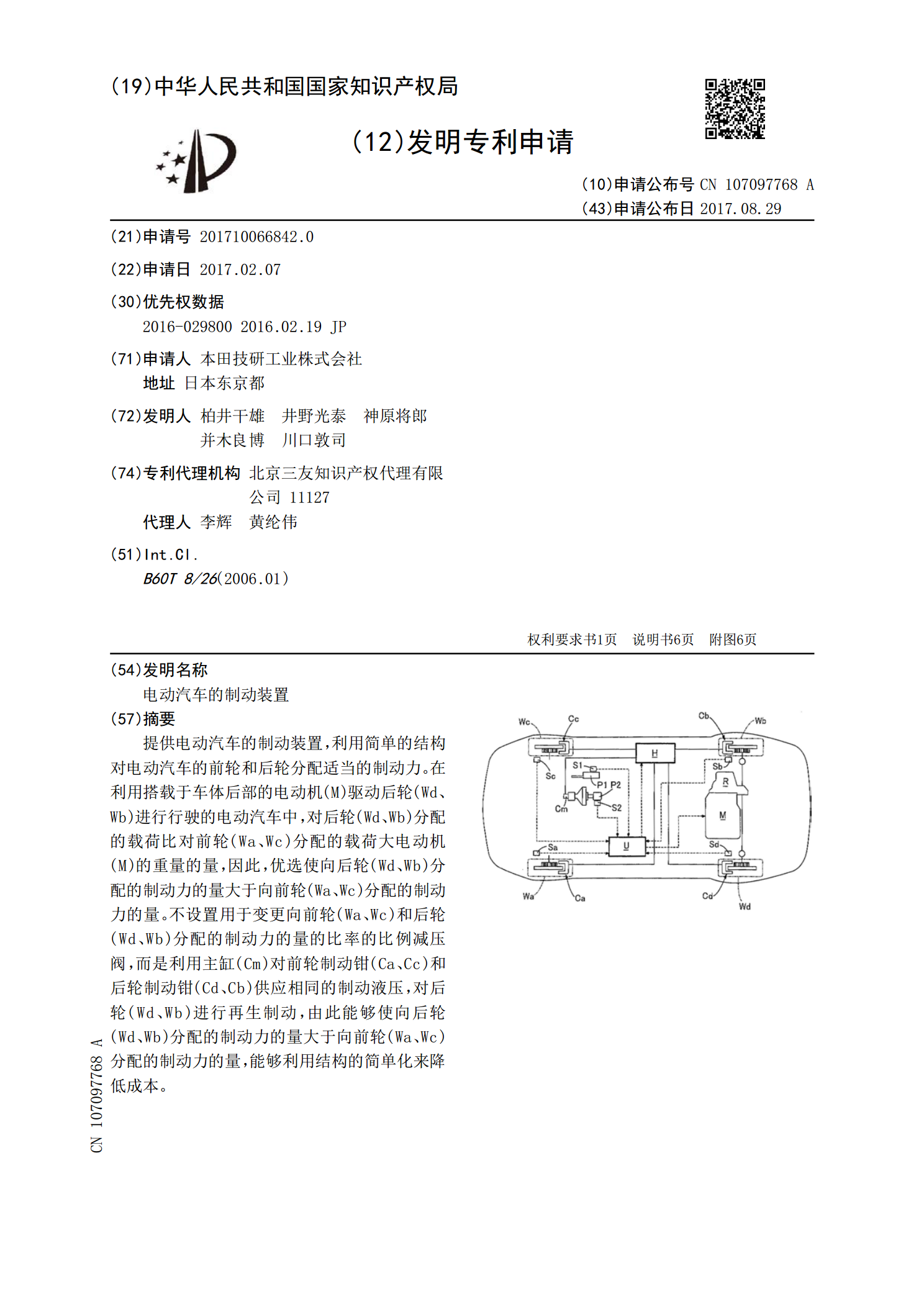
提供电动汽车的制动装置,利用简单的结构对电动汽车的前轮和后轮分配适当的制动力。在利用搭载于车体后部的电动机(M)驱动后轮(Wd、Wb)进行行驶的电动汽车中,对后轮(Wd、Wb)分配的载荷比对前轮(Wa、Wc)分配的载荷大电动机(M)的重量的量,因此,优选使向后轮(Wd、Wb)分配的制动力的量大于向前轮(Wa、Wc)分配的制动力的量。不设置用于变更向前轮(Wa、Wc)和后轮(Wd、Wb)分配的制动力的量的比率的比例减压阀,而是利用主缸(Cm)对前轮制动钳(Ca、Cc)和后轮制动钳(Cd、Cb)供应相同的制动

基于某车道路制动试验的ABS制动系统研究.doc
全套设计(图纸)加扣扣194535455摘要随着经济和科技的高速发展,汽车已经成为人们生活中重要的代步和娱乐工具,其安全性也越来越受关注。汽车防抱死制动系统(Anti-lockBrakingSystem,ABS),它能够通过实时调控车轮制动压力,防止在制动过程中因车轮抱死引起的车辆制动跑偏、后轴侧滑以及失去转向能力等情况的发生,使车辆能够最大限度地利用好地面附着率和地面制动力,从而达到车辆的行车安全。本课题的研究旨在提高ABS制动系统的分析、匹配和优化能力,并为新开发某车的制动系统性能提高提供技术支持。在