
一种基于自适应布谷鸟搜索算法的水面无人艇路径规划方法.pdf

纪阳****公主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于自适应布谷鸟搜索算法的水面无人艇路径规划方法.pdf
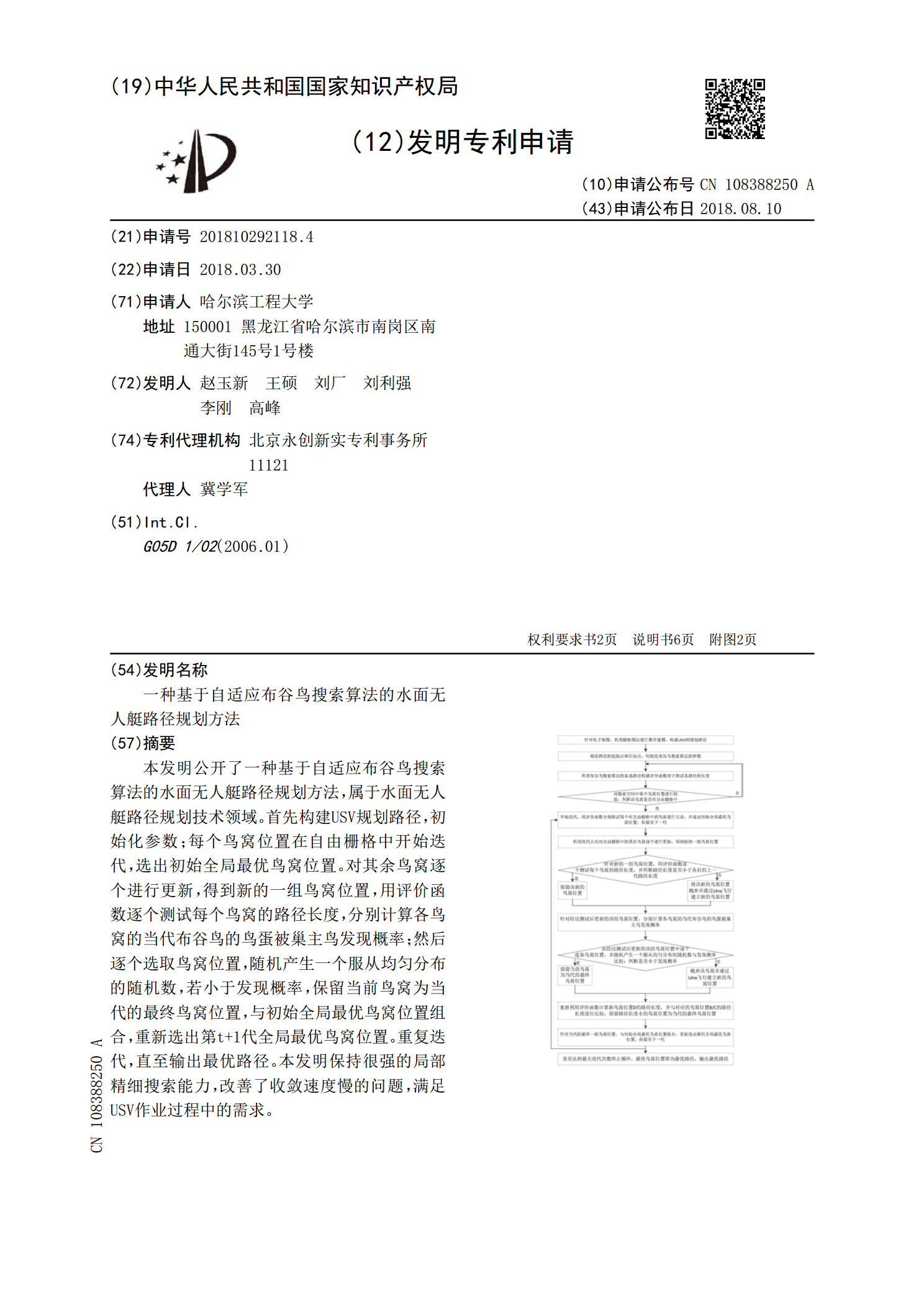
本发明公开了一种基于自适应布谷鸟搜索算法的水面无人艇路径规划方法,属于水面无人艇路径规划技术领域。首先构建USV规划路径,初始化参数;每个鸟窝位置在自由栅格中开始迭代,选出初始全局最优鸟窝位置。对其余鸟窝逐个进行更新,得到新的一组鸟窝位置,用评价函数逐个测试每个鸟窝的路径长度,分别计算各鸟窝的当代布谷鸟的鸟蛋被巢主鸟发现概率;然后逐个选取鸟窝位置,随机产生一个服从均匀分布的随机数,若小于发现概率,保留当前鸟窝为当代的最终鸟窝位置,与初始全局最优鸟窝位置组合,重新选出第t+1代全局最优鸟窝位置。重复迭代,直
基于深度强化学习的水面无人艇路径跟踪方法.pdf
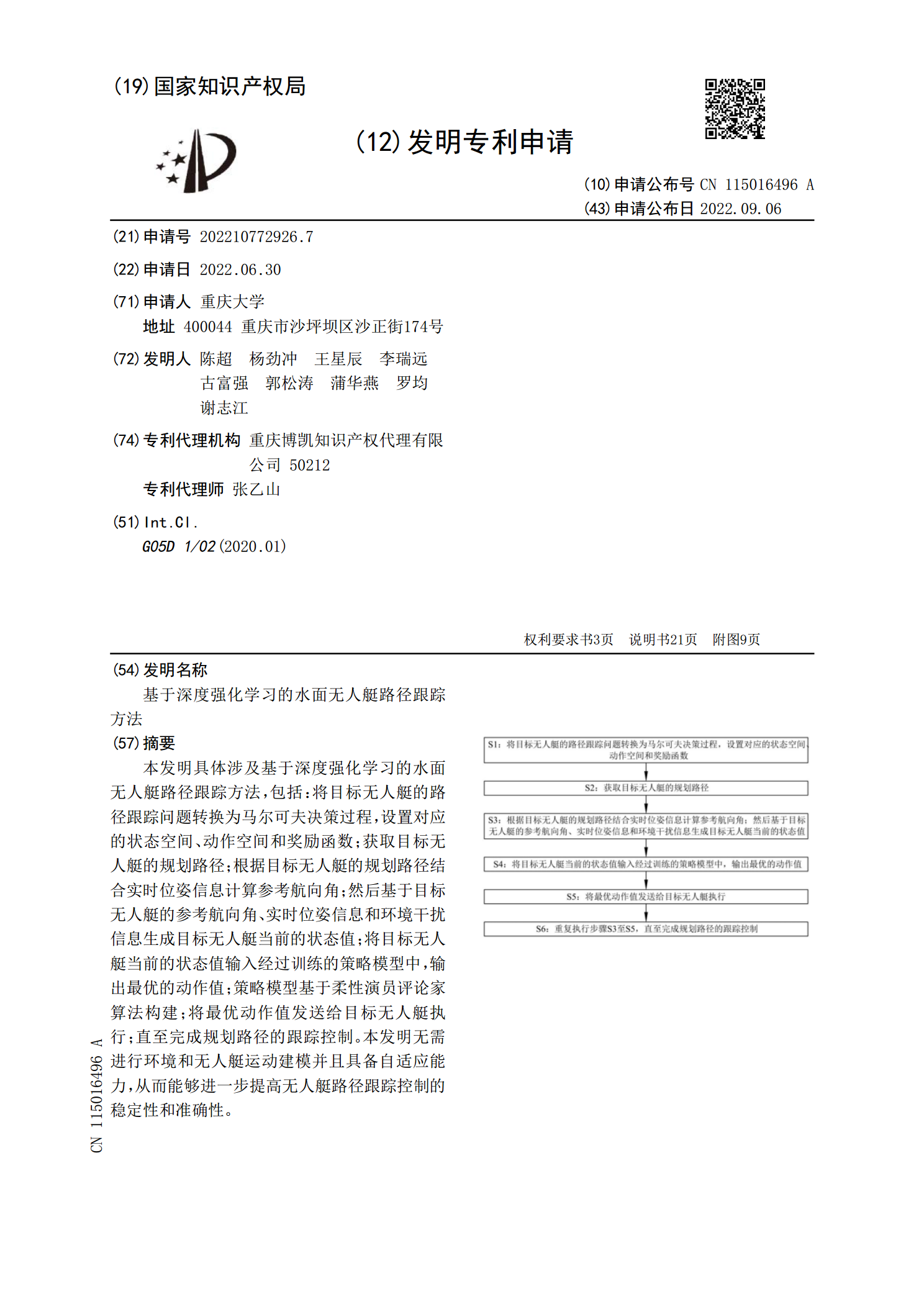
本发明具体涉及基于深度强化学习的水面无人艇路径跟踪方法,包括:将目标无人艇的路径跟踪问题转换为马尔可夫决策过程,设置对应的状态空间、动作空间和奖励函数;获取目标无人艇的规划路径;根据目标无人艇的规划路径结合实时位姿信息计算参考航向角;然后基于目标无人艇的参考航向角、实时位姿信息和环境干扰信息生成目标无人艇当前的状态值;将目标无人艇当前的状态值输入经过训练的策略模型中,输出最优的动作值;策略模型基于柔性演员评论家算法构建;将最优动作值发送给目标无人艇执行;直至完成规划路径的跟踪控制。本发明无需进行环境和无人
一种基于改进EMPC的高速无人艇路径跟踪控制方法.pdf
本发明公开了一种基于改进EMPC的高速无人艇路径跟踪控制方法,包括如下步骤:步骤1:构建欠驱动水面高速无人艇的基础模型和坐标系;步骤2:在制导方法中,结合当前船速通过动态视线法对LOS前视园半径进行优化,在优化后的LOS前视园半径基础上结合横侧偏差率获取期望航向角;步骤3:在EMPC控制器离线状态中,通过白鹭群优化算法,对离线状态下的各个状态分区进行最优控制律求解,得到各个状态分区及对应分区上的线性控制律;步骤4:在EMPC控制器在线状态中,通过可达分区查找法查找步骤3中获得的对应分区上的线性控制律,控制

一种基于区域建议网络的无人艇水面目标检测方法.pdf
本发明公开了一种基于区域建议网络的无人艇水面目标检测方法,应用更快速‑区域神经网络和区域建议网络在线进行水面目标检测,基于特征融合原理,在使用区域建议网络的基础上,修改了锚点的生成机制,提出一种使用特征融合方法构造新的特征层,并将锚点分线路在不同特征图上生成的区域建议方法,同时根据特征图大小采用间隔采样策略减少计算量。方法的优点在于最大程度上保留了潜在目标,每个区域建议都有对应的分类结果而不会被有重叠区域的其他区域兼并,以增加一定计算量为代价提升目标物体的召回率,一定程度上降低其漏检概率。
一种无人水面艇收放无人潜航器装置.pdf
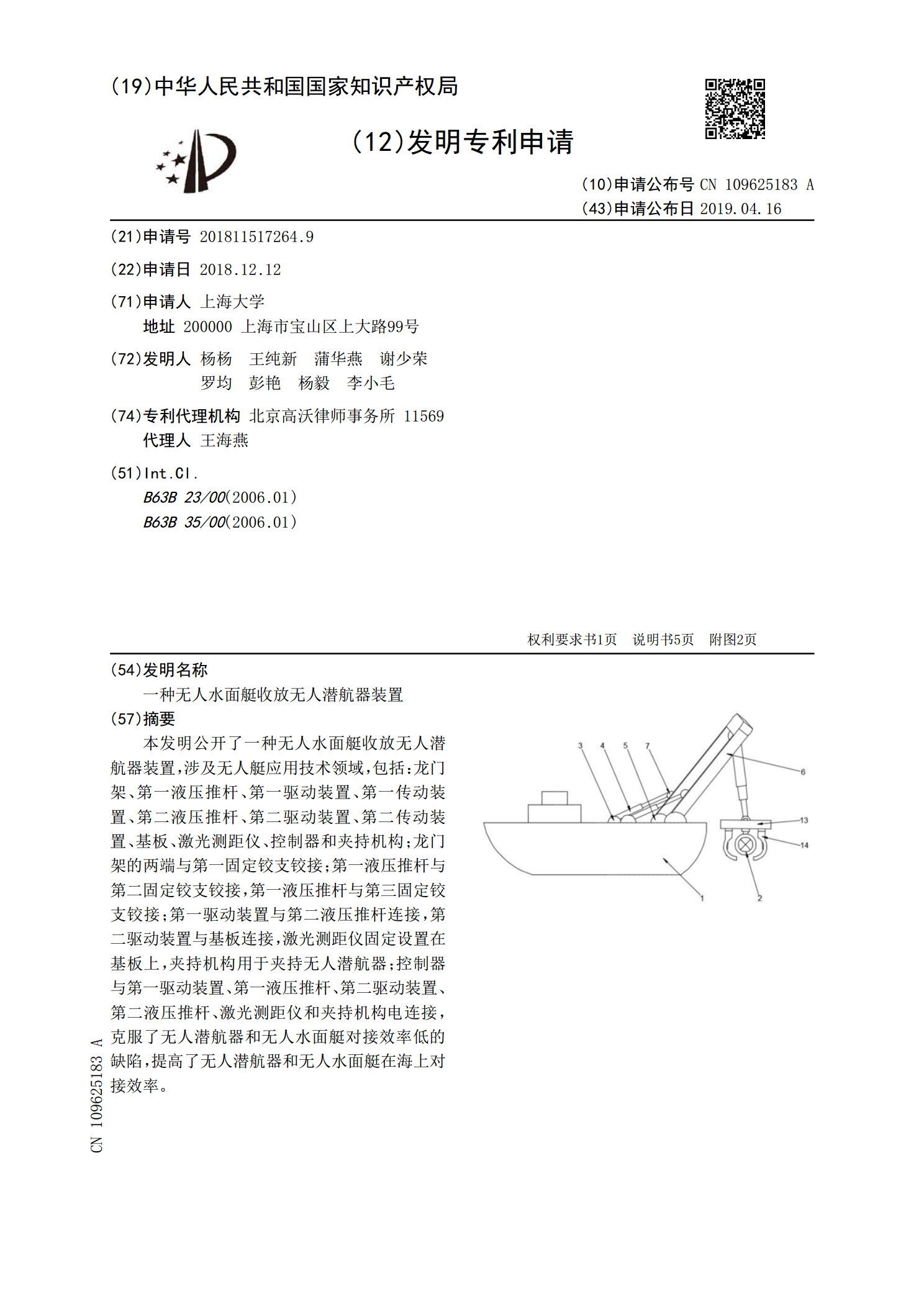
本发明公开了一种无人水面艇收放无人潜航器装置,涉及无人艇应用技术领域,包括:龙门架、第一液压推杆、第一驱动装置、第一传动装置、第二液压推杆、第二驱动装置、第二传动装置、基板、激光测距仪、控制器和夹持机构;龙门架的两端与第一固定铰支铰接;第一液压推杆与第二固定铰支铰接,第一液压推杆与第三固定铰支铰接;第一驱动装置与第二液压推杆连接,第二驱动装置与基板连接,激光测距仪固定设置在基板上,夹持机构用于夹持无人潜航器;控制器与第一驱动装置、第一液压推杆、第二驱动装置、第二液压推杆、激光测距仪和夹持机构电连接,克服了