
一种保留局部边缘方向的图像边缘提取方法.pdf

绮兰****文章


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种保留局部边缘方向的图像边缘提取方法.pdf
本发明公开了一种保留局部边缘方向的图像边缘提取方法,包括以下步骤:S1、读入待处理的三通道RGB图片;S2、设置边缘提取阈值threshold;S3、将待处理的三通道RGB图片转化为灰度图片;S4、根据边缘提取阈值threshold,使用边缘提取算子对灰度图片进行边缘提取,得到边缘图。本发明可以在提取图片边缘的基础上,保留图片边缘的局部方向,使得处理后得到的边缘图保留了更多的局部信息。
图像边缘提取的方法.pdf
本分案申请公开了一种图像边缘提取的方法,属于检测领域,用于优化钢轨磨耗的检测及计算过程,其技术要点是:任取一条沿水平方向分布像素点的中值滤波亮度曲线,在该曲线最大峰值两侧分别取出亮度梯度变化最大的连续点,取该两组连续点的中点p和q,p和q之间距离作为检测模板直径;效果是实现了图像边缘提取。
一种手指静脉图像边缘提取及方向矫正方法.pdf
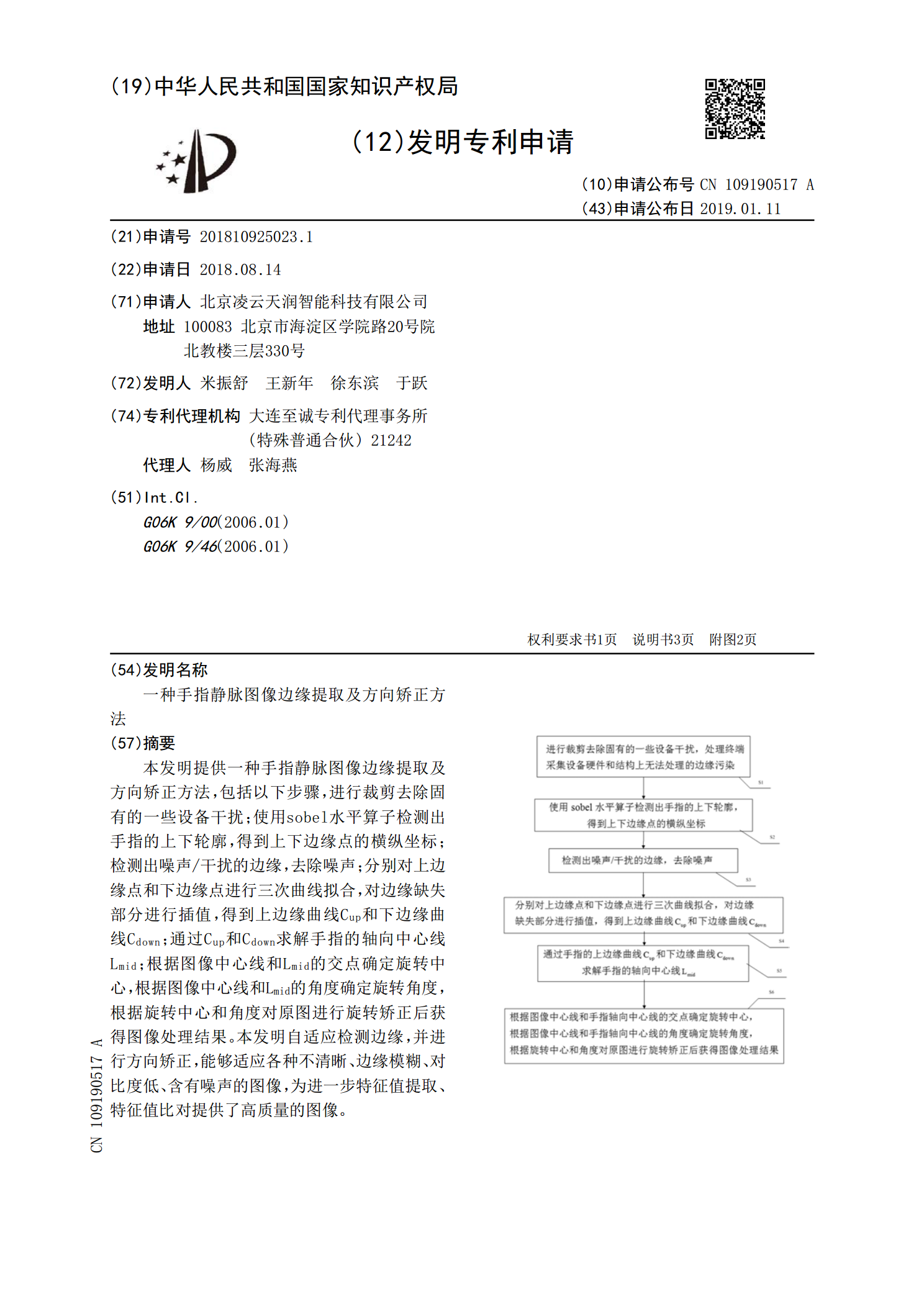
本发明提供一种手指静脉图像边缘提取及方向矫正方法,包括以下步骤,进行裁剪去除固有的一些设备干扰;使用sobel水平算子检测出手指的上下轮廓,得到上下边缘点的横纵坐标;检测出噪声/干扰的边缘,去除噪声;分别对上边缘点和下边缘点进行三次曲线拟合,对边缘缺失部分进行插值,得到上边缘曲线C
一种保留图像边缘的图像滤波方法、装置及存储介质.pdf
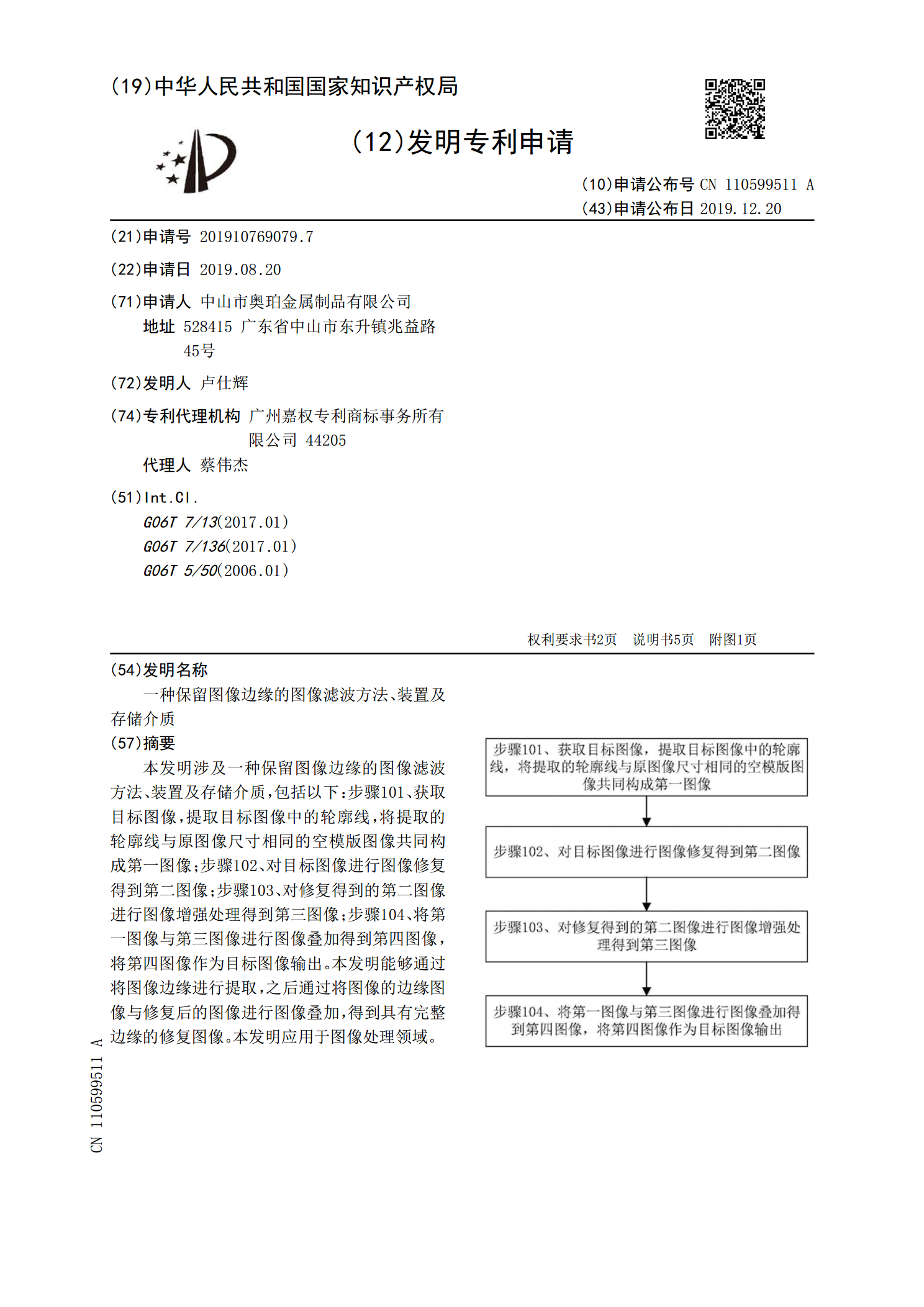
本发明涉及一种保留图像边缘的图像滤波方法、装置及存储介质,包括以下:步骤101、获取目标图像,提取目标图像中的轮廓线,将提取的轮廓线与原图像尺寸相同的空模版图像共同构成第一图像;步骤102、对目标图像进行图像修复得到第二图像;步骤103、对修复得到的第二图像进行图像增强处理得到第三图像;步骤104、将第一图像与第三图像进行图像叠加得到第四图像,将第四图像作为目标图像输出。本发明能够通过将图像边缘进行提取,之后通过将图像的边缘图像与修复后的图像进行图像叠加,得到具有完整边缘的修复图像。本发明应用于图像处理领

基于边缘提取的图像处理方法及图像处理装置.pdf
本发明提供一种基于边缘提取的图像处理方法及图像处理装置,所述图像处理方法包括以下步骤:对待处理图像进行边缘提取计算,获取所述待处理图像的边缘区;将所述待处理图像中除所述边缘区以外的区域划分为噪声区和平坦区;分别对所述噪声区和所述平坦区进行对应程度的降噪处理;将经过降噪处理后的所述噪声区和所述平坦区与所述边缘区合成,得到处理后的合成图像。本发明对噪声区和平坦区进行基于不同权重值的双边滤波,使得各个区域都能够在保留有用信息的同时最大限度去除噪声成分,使得合成图像更加清晰。本发明将边缘区附近的侵蚀区也作为噪声区