
一种液压-机械复合驱动装置.pdf

一只****iu


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种液压-机械复合驱动装置.pdf
本发明公开了一种液压‑机械复合驱动装置,包括电动机、液压马达、传动箱组件、轴承组件、滚珠丝杠传动组件、位移/速度传感器、转速/转矩/转角传感器、电子开关、加法器、控制器、电机控制器和液压回路。该液压‑机械复合驱动装置将电动机与液压马达串联连接,共同组成动力源进行驱动,并通过传动箱与滚珠丝杠副将旋转运动转换成直线运动。该液压‑机械复合驱动装置保留了电动缸优点的同时,增加了液压系统功率密度大的优点,通过液压和电动机的复合驱动,可以在较小尺寸的情况下,提高电动缸功率/重量比,以适应冲击、重载的场合。
一种液压驱动快换接头装置及机械装置.pdf
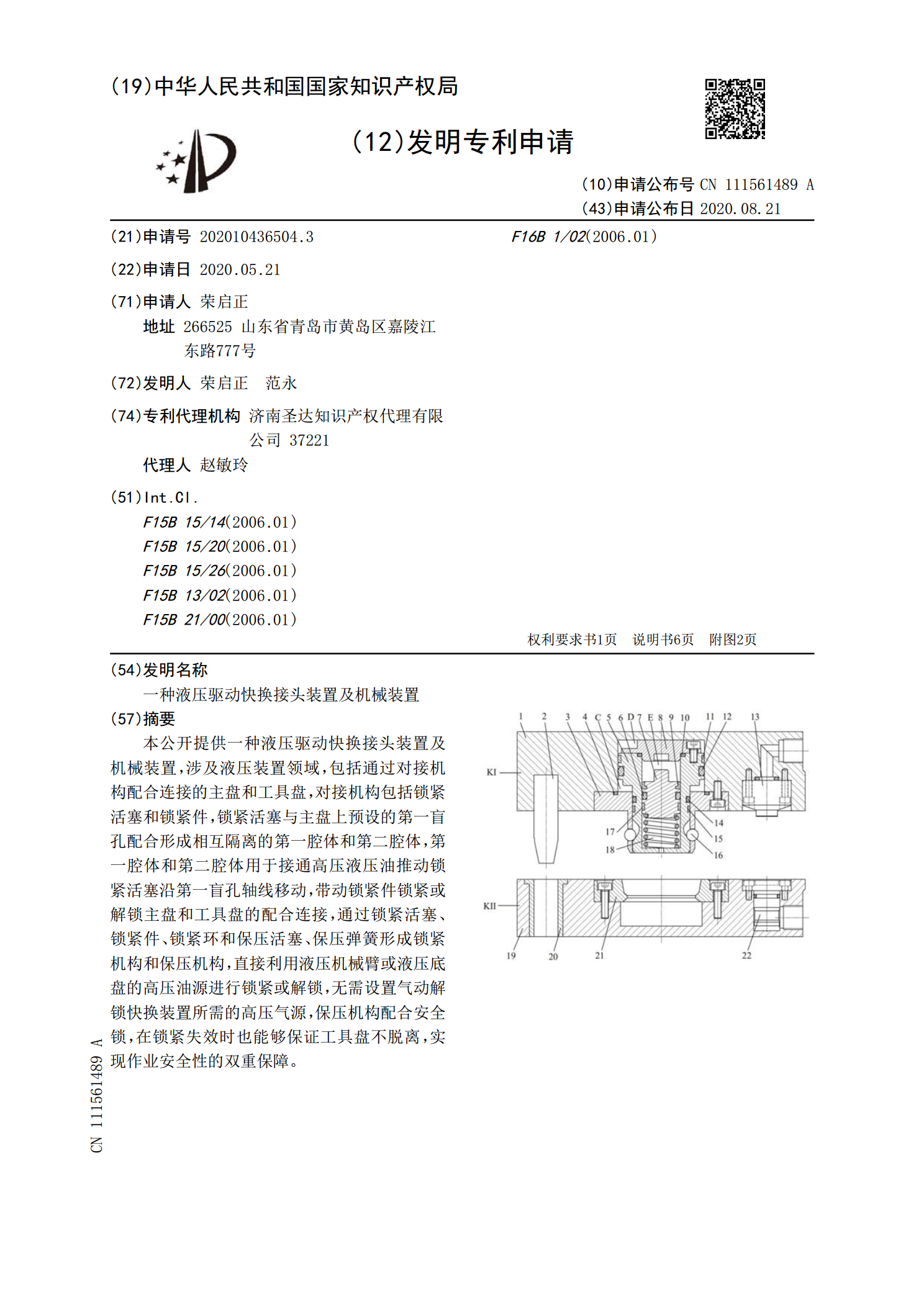
本公开提供一种液压驱动快换接头装置及机械装置,涉及液压装置领域,包括通过对接机构配合连接的主盘和工具盘,对接机构包括锁紧活塞和锁紧件,锁紧活塞与主盘上预设的第一盲孔配合形成相互隔离的第一腔体和第二腔体,第一腔体和第二腔体用于接通高压液压油推动锁紧活塞沿第一盲孔轴线移动,带动锁紧件锁紧或解锁主盘和工具盘的配合连接,通过锁紧活塞、锁紧件、锁紧环和保压活塞、保压弹簧形成锁紧机构和保压机构,直接利用液压机械臂或液压底盘的高压油源进行锁紧或解锁,无需设置气动解锁快换装置所需的高压气源,保压机构配合安全锁,在锁紧失效

一种TBM刀盘电机液压马达复合驱动装置.pdf
本发明公开了一种TBM刀盘电机液压马达复合驱动装置,包括大齿圈和变频电机驱动机构,变频电机驱动机构包括第一小齿轮、第一减速器和变频电机,第一小齿轮与大齿圈啮合,第一减速器的输出轴与第一小齿轮固定连接,第一减速器输入轴与变频电机输出轴连接;此外还包括液压马达驱动机构,液压马达驱动机构包括第二小齿轮、第二减速器、粘性离合器和液压马达,第二小齿轮与大齿圈啮合,第二减速器输出轴与第二小齿轮固定连接,第二减速器输入轴与粘性离合器输出轴连接,粘性离合器的输入轴与液压马达的输出轴连接。本发明显著增强了TBM的脱困能力和

一种机械液压复合传动装置及控制方法.pdf
本发明公开了一种机械液压复合传动装置及控制方法,包括输入轴、分流机构、液压传动组件、机械传动组件、汇流机构和输出轴,所述输入轴通过分流机构与相互并联的液压传动组件和机械传动组件连接,所述液压传动组件和机械传动组件通过汇流机构分别与输出轴连接;有益效果:本发明将行星齿轮结构与制动器和离合器的切换相结合,实现功率分流与汇流结构形式的转换。实现正向传动和反向传动时,功率分流和功率汇流结构形式多样化并且能够相互兼顾,有利于优化结构参数,并且避免产生循环功率,提高了传动效率。具有多模式的传动装置内设置了多种可供选择

液压驱动机械手装置.docx
题目四自由度机械手的设计(第一、二、三阶段)小组成员姓名与学号杨骏威(3100104453)黄元(3100101605)姚津津(3100103253)马韶君(3100100557)年级与专业机械电子工程1002班所在学院机械工程学系第一部分:机构设计、油缸设计与马达选型机构设计根据需求,我们小组的总体机构设计原理图:机械臂设计需求(1)机械臂在0.6米全伸距下提供25kg的举力(2)基座左右回转、上下摆动90度(3)腕关节360度回转,转速8~35rpm,最大扭矩50Mm(4)手爪开合油缸最大抓力为100