
车辆主动减振降噪系统及方法.pdf

猫巷****雪凝


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆主动减振降噪系统及方法.pdf
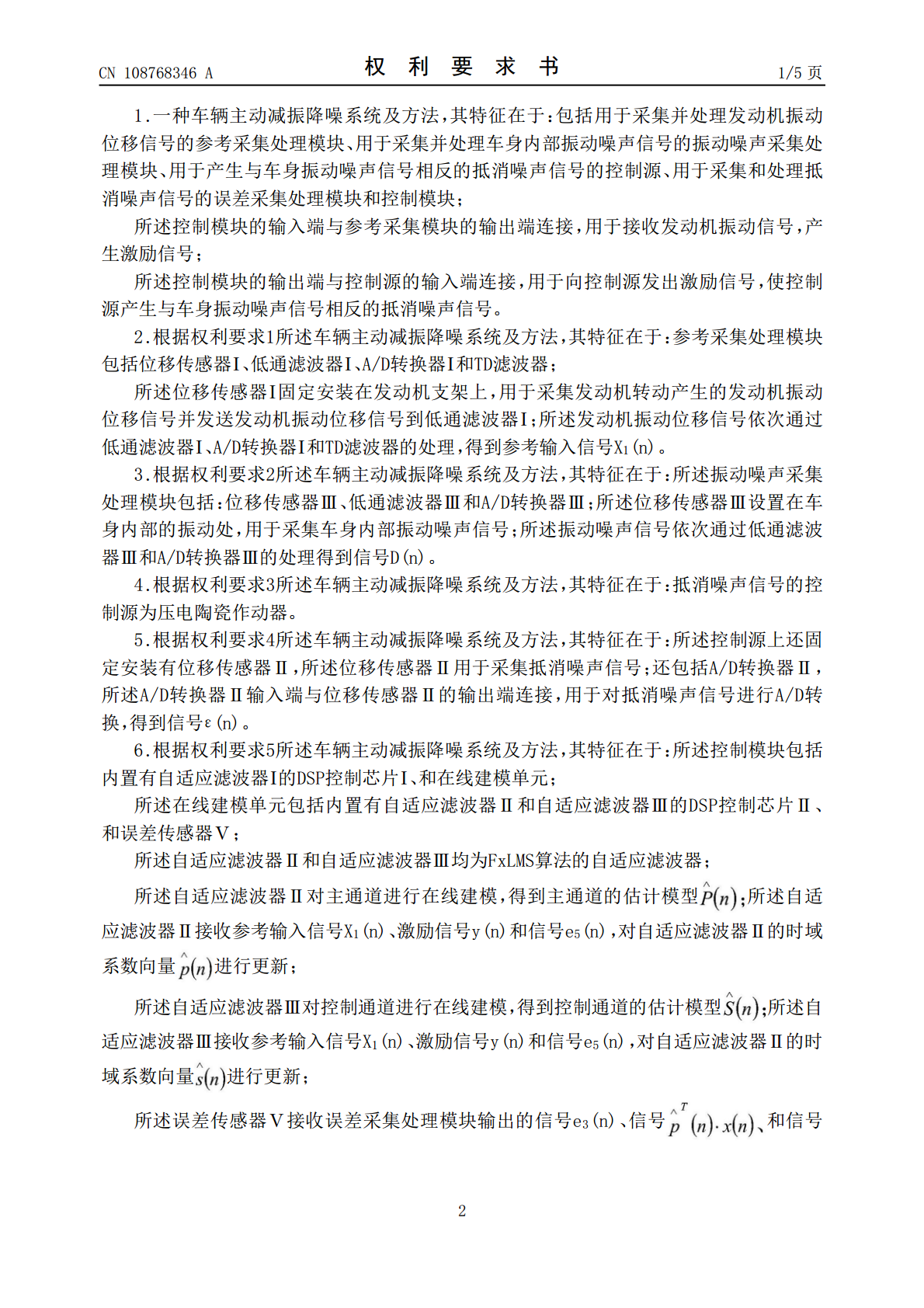
本发明提供一种车辆主动减振降噪系统及方法,包括:用于采集并处理发动机振动位移信号的参考采集处理模块、用于采集并处理车身内部振动噪声信号的振动噪声采集处理模块、用于产生与车身振动噪声信号相反的抵消噪声信号的控制源、用于采集和处理抵消噪声信号的误差采集处理模块和控制模块;所述控制模块的输入端与参考采集模块的输出端连接,用于接收发动机振动信号,产生激励信号;本发明能根据车身振动的变化自适应调节激励信号以使抵消车身内部振动后的残留信号能达到极小值,并使用于抵消车身内部振动的作动产生的噪声能够基本忽略不计,提高了车
车辆减振系统、车辆和车辆减振方法.pdf
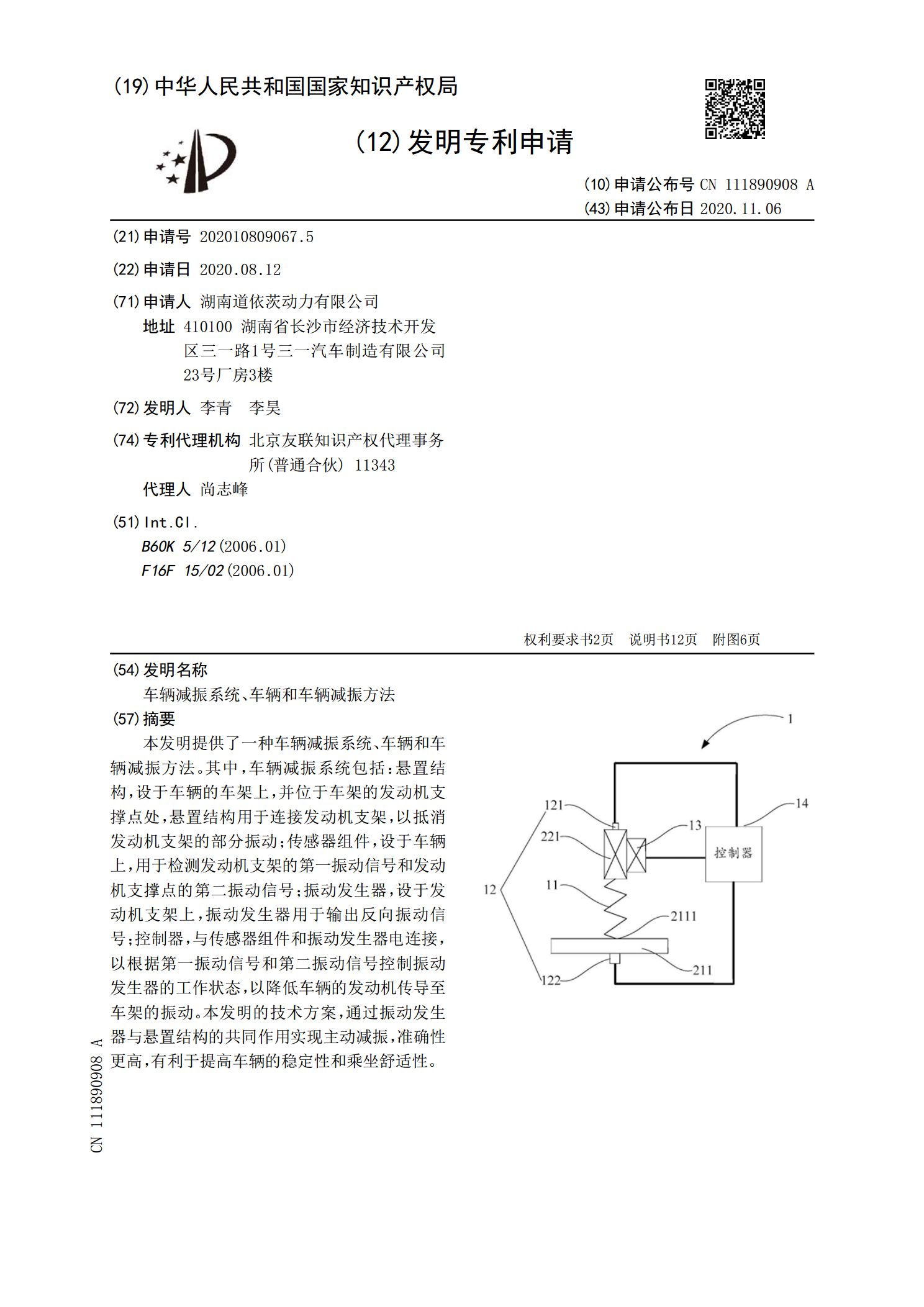
本发明提供了一种车辆减振系统、车辆和车辆减振方法。其中,车辆减振系统包括:悬置结构,设于车辆的车架上,并位于车架的发动机支撑点处,悬置结构用于连接发动机支架,以抵消发动机支架的部分振动;传感器组件,设于车辆上,用于检测发动机支架的第一振动信号和发动机支撑点的第二振动信号;振动发生器,设于发动机支架上,振动发生器用于输出反向振动信号;控制器,与传感器组件和振动发生器电连接,以根据第一振动信号和第二振动信号控制振动发生器的工作状态,以降低车辆的发动机传导至车架的振动。本发明的技术方案,通过振动发生器与悬置结构
车辆转向系统高压油管的减振降噪装置.pdf
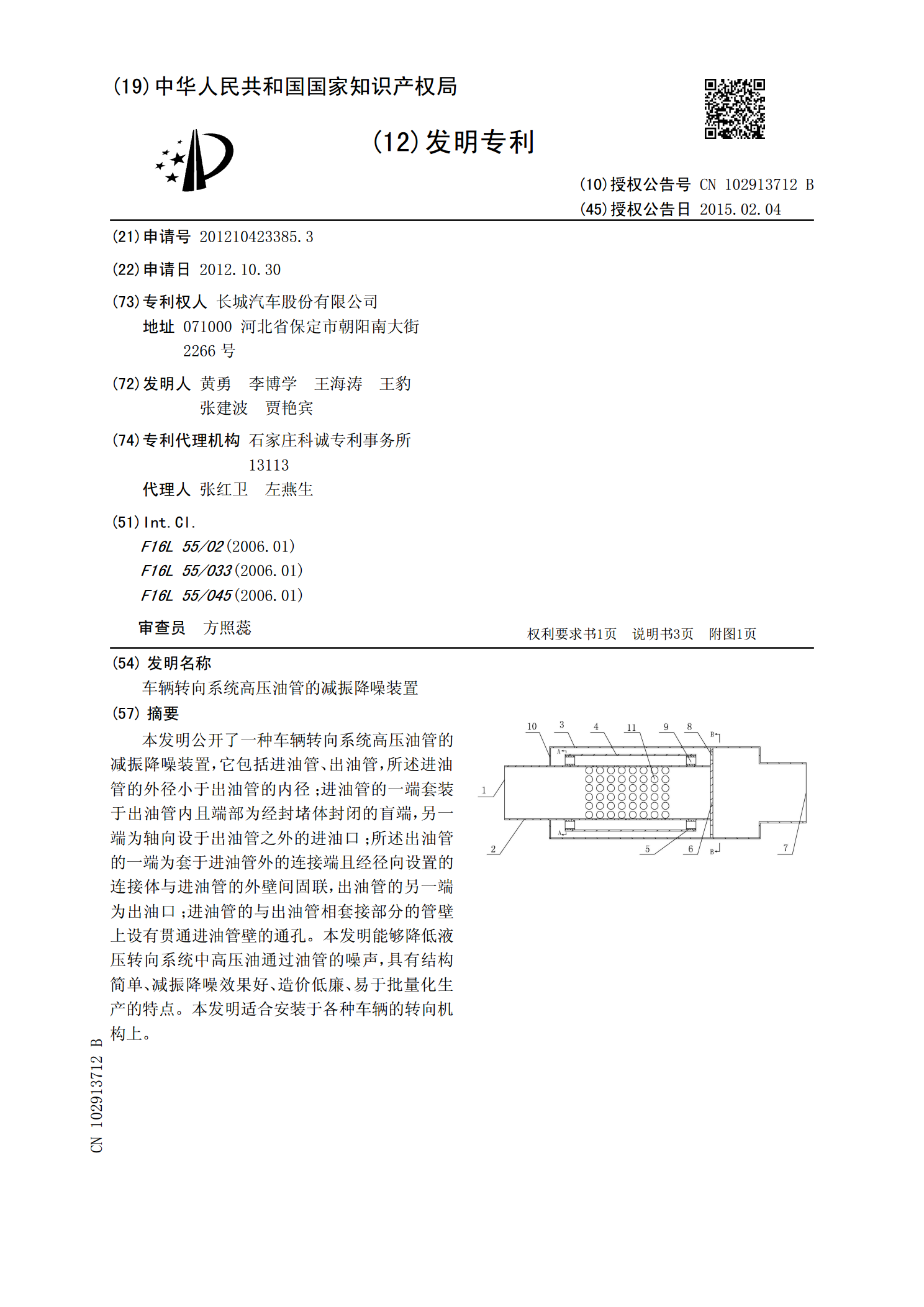
本发明公开了一种车辆转向系统高压油管的减振降噪装置,它包括进油管、出油管,所述进油管的外径小于出油管的内径;进油管的一端套装于出油管内且端部为经封堵体封闭的盲端,另一端为轴向设于出油管之外的进油口;所述出油管的一端为套于进油管外的连接端且经径向设置的连接体与进油管的外壁间固联,出油管的另一端为出油口;进油管的与出油管相套接部分的管壁上设有贯通进油管壁的通孔。本发明能够降低液压转向系统中高压油通过油管的噪声,具有结构简单、减振降噪效果好、造价低廉、易于批量化生产的特点。本发明适合安装于各种车辆的转向机构上。

基于界面调控的摩擦系统减振降噪方法.pptx
汇报人:目录PARTONEPARTTWO界面调控的摩擦系统减振降噪方法的定义界面调控的摩擦系统减振降噪方法的原理界面调控的摩擦系统减振降噪方法的优势PARTTHREE机械工程领域航空航天领域汽车工程领域其他领域PARTFOUR界面调控的摩擦系统设计摩擦材料的选择与制备摩擦系统的装配与调试减振降噪效果的测试与评估PARTFIVE减振效果的测试与评估降噪效果的测试与评估经济效益的分析与评估社会效益的分析与评估PARTSIX技术挑战与解决方案应用挑战与解决方案未来发展方向与展望THANKYOU

车辆减振装置、车辆减振系统和车辆.pdf
本发明涉及一种车辆减振装置、车辆减振系统和车辆,其中车辆减振装置包括车架(1)、第一车轴(2)、第一弹性组件(3)和第一阻尼器(4),所述第一弹性组件(3)和所述第一阻尼器(4)相对独立且并联连接于所述车架(1)和所述第一车轴(2)之间。车辆减振系统包括车辆减振装置。车辆包括车辆减振系统。本发明中第一弹性组件和第一阻尼器这两个发热单元实现了隔离设置,可以有效提升第一弹性组件和第一阻尼器的散热能力,避免第一弹性组件和第一阻尼器所散发的热量发生集聚或者交叉影响,从而缓解因热量集聚或交叉影响引起的悬架装置整体温