
一种气动翻转取料机械手.pdf

听容****55

1/7
2/7
3/7
4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种气动翻转取料机械手.pdf
本发明公开了一种气动翻转取料机械手,包括U形安装板、旋转组件、双向气缸、两个气缸组件和两个夹手组件;其中两个气缸组件对称平行固定于U形安装板的两个内侧壁上,且两者之间留有空隙,旋转组件设置于两个气缸组件之间,且分别与两个气缸组件连接;其中双向气缸包括固定筒和两根活动杆,固定筒设置于两根活动杆的之间,并套在两根活动杆的外侧限制活动杆的行程和自由度,使其在行程范围内运动,双向气缸通过固定筒固定于旋转组件上,两个夹手组件分别与双向气缸的两根活动杆固定,使得两个夹手组件可随双向气缸的两根活动杆在行程范围内运动。本
手榴弹包装用机械手取料翻转装置.pdf
本发明涉及手榴弹包装技术领域,且公开了手榴弹包装用机械手取料翻转装置,其包括底座,所述底座上端一侧设置有第一支撑架,位于所述第一支撑架一侧的所述底座上端设置有第二支撑架,所述第二支撑架上端设置有X轴运动伺服机械手,所述X轴运动伺服机械手内设置有第一移动座,所述第一支撑架上端两侧均设置有连接架,通过设置X轴运动伺服机械手、Y轴运动伺服机械手、支撑板、第一移动座、第二移动座、运动滑轨和滑轨连接架,可使CCD检测头、视觉光源、Z轴运动气缸、安装架和旋转气爪能够便捷的移动至平面上任一坐标位置,以便对引信托盘上引信
一种翻转取料装置.pdf
一种翻转取料装置,底座上开有导向槽并于导向槽一侧处装有两个或三个的导向销,驱动机构通过移动座带动旋转轴上的导向块沿导向槽移动,旋转轴上的凸轮板设有与导向销匹配的凸轮槽,使得旋转轴沿导向槽移动的过程中,旋转轴和凸轮板依次绕导向销转动,因所有导向销的连线方向与导向槽平行,安装于旋转轴上的取料机构及其上的物料随旋转轴转动的前后即可完成180°的翻转。该翻转取料装置结构简单,通过驱动机构的直线驱动即可实现翻转,其工作过程快速、稳定,可有效提高生产效率,并降低设备、人力等生产成本。
气动翻转取坯系统.pdf
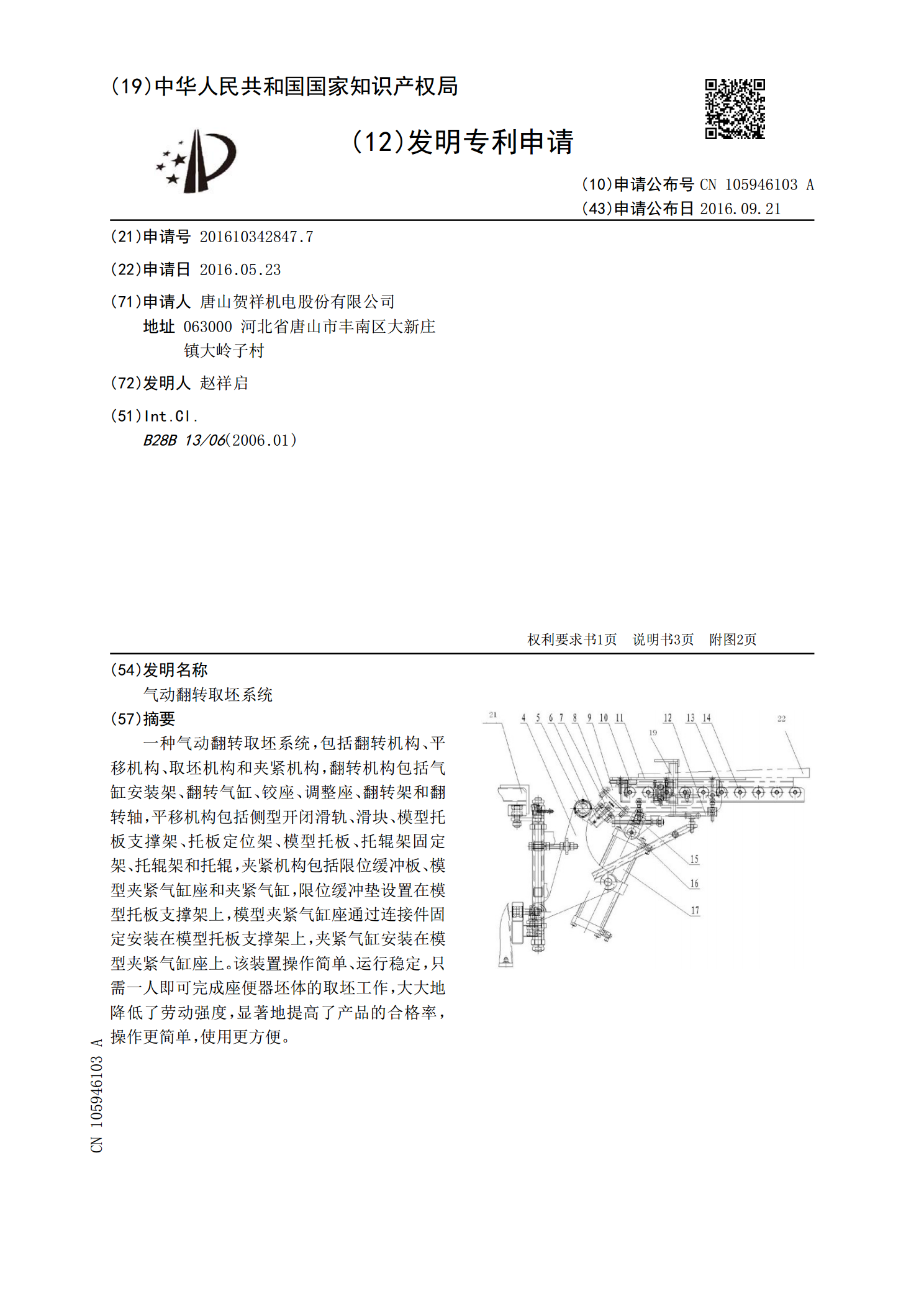
一种气动翻转取坯系统,包括翻转机构、平移机构、取坯机构和夹紧机构,翻转机构包括气缸安装架、翻转气缸、铰座、调整座、翻转架和翻转轴,平移机构包括侧型开闭滑轨、滑块、模型托板支撑架、托板定位架、模型托板、托辊架固定架、托辊架和托辊,夹紧机构包括限位缓冲板、模型夹紧气缸座和夹紧气缸,限位缓冲垫设置在模型托板支撑架上,模型夹紧气缸座通过连接件固定安装在模型托板支撑架上,夹紧气缸安装在模型夹紧气缸座上。该装置操作简单、运行稳定,只需一人即可完成座便器坯体的取坯工作,大大地降低了劳动强度,显著地提高了产品的合格率,操
一种取料机械手.pdf
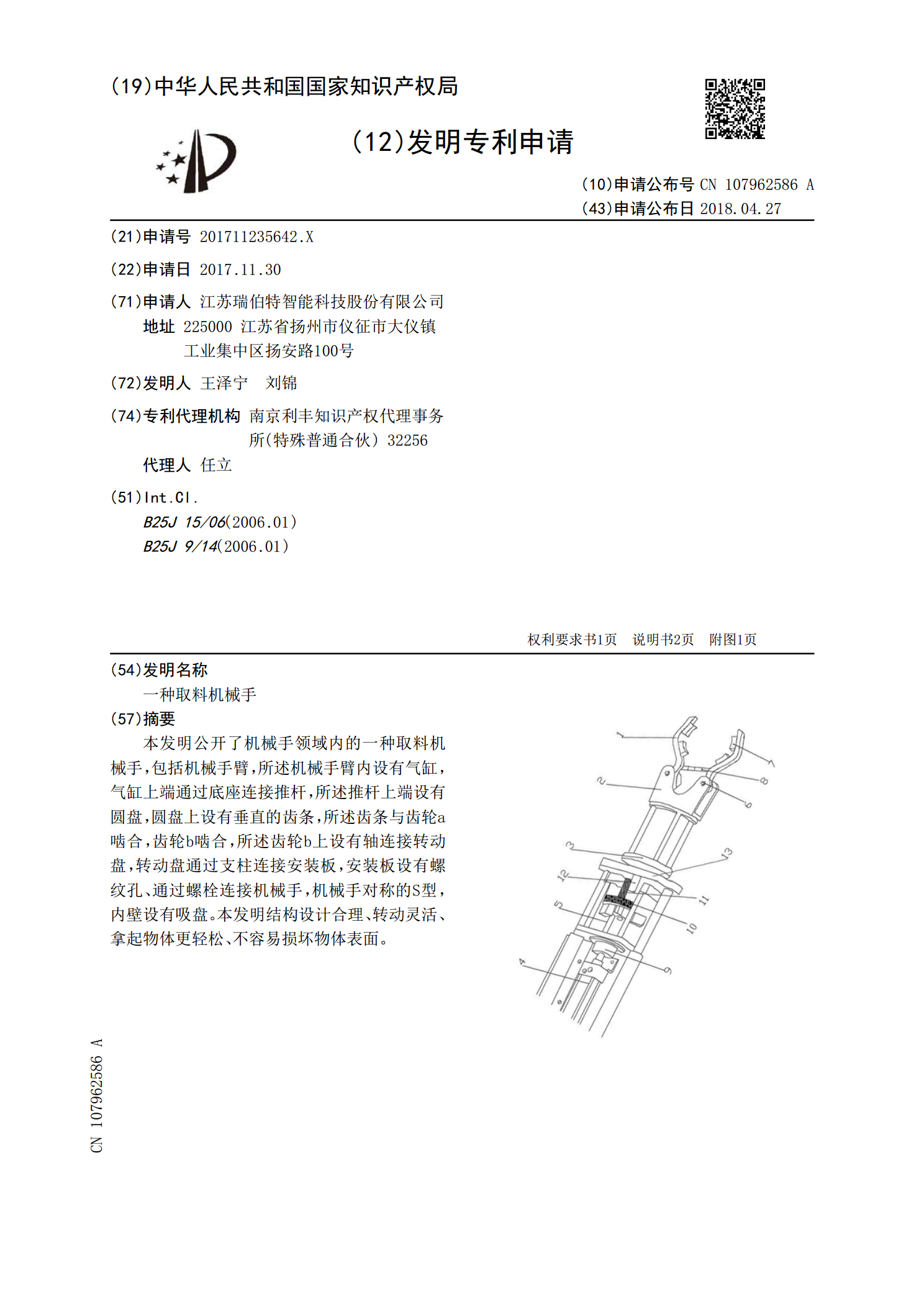
本发明公开了机械手领域内的一种取料机械手,包括机械手臂,所述机械手臂内设有气缸,气缸上端通过底座连接推杆,所述推杆上端设有圆盘,圆盘上设有垂直的齿条,所述齿条与齿轮a啮合,齿轮b啮合,所述齿轮b上设有轴连接转动盘,转动盘通过支柱连接安装板,安装板设有螺纹孔、通过螺栓连接机械手,机械手对称的S型,内壁设有吸盘。本发明结构设计合理、转动灵活、拿起物体更轻松、不容易损坏物体表面。