
一种可抗噪声的改进Canny图像边缘检测方法.pdf

桂香****盟主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种可抗噪声的改进Canny图像边缘检测方法.pdf
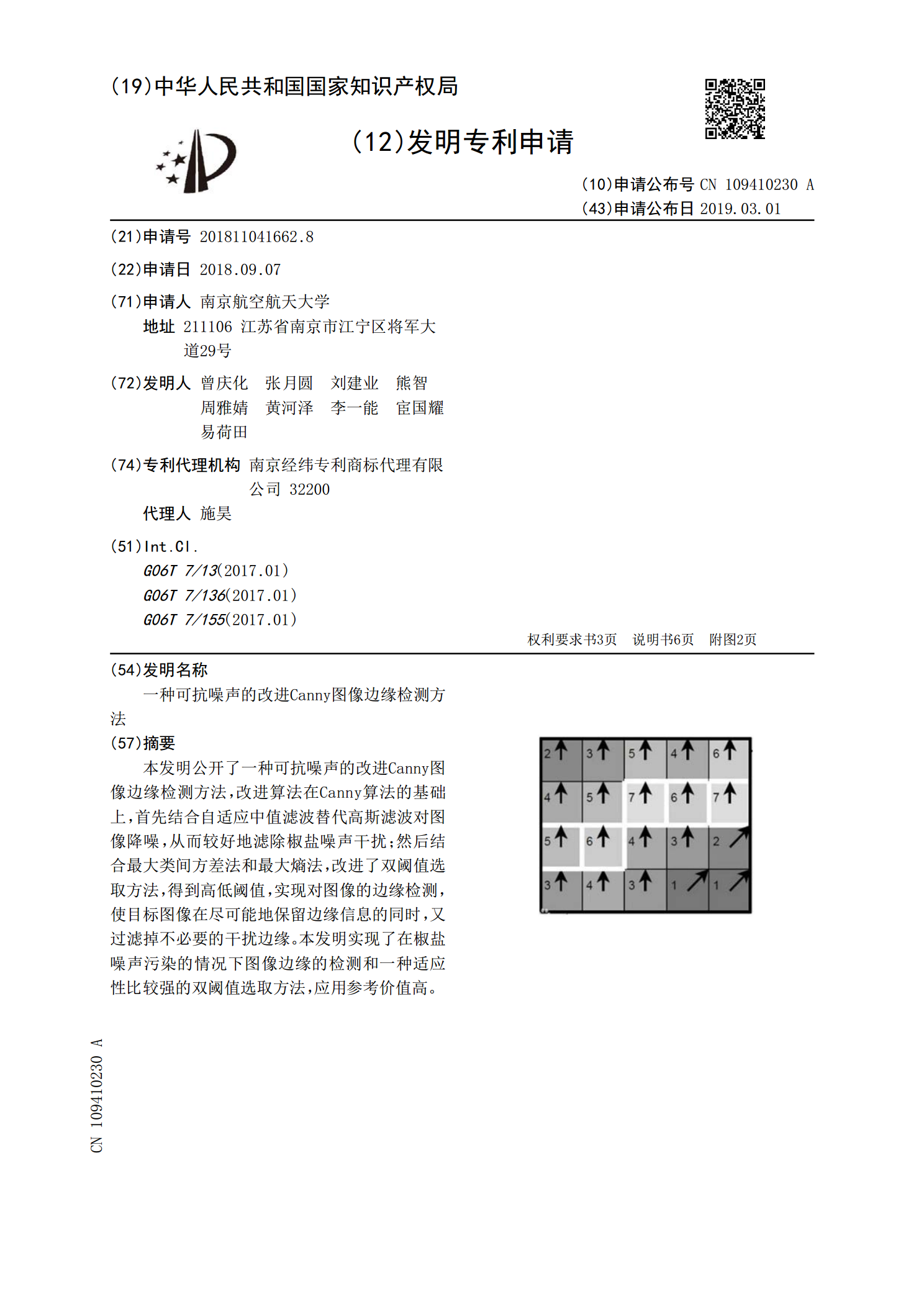
本发明公开了一种可抗噪声的改进Canny图像边缘检测方法,改进算法在Canny算法的基础上,首先结合自适应中值滤波替代高斯滤波对图像降噪,从而较好地滤除椒盐噪声干扰;然后结合最大类间方差法和最大熵法,改进了双阈值选取方法,得到高低阈值,实现对图像的边缘检测,使目标图像在尽可能地保留边缘信息的同时,又过滤掉不必要的干扰边缘。本发明实现了在椒盐噪声污染的情况下图像边缘的检测和一种适应性比较强的双阈值选取方法,应用参考价值高。
一种改进的图像边缘检测方法.pdf
本发明公开了一种改进的图像边缘检测方法,包括以下步骤:S1:对图像进行平滑处理,使用改进的中值滤波器抑制噪声;S2:通过x,y,45°,135°方向上的一阶偏导数,求出水平和垂直方向的差分,进而求得梯度幅值和梯度方向;S3:对梯度幅值进行非极大值抑制;S4:利用梯度直方图求出高阈值和低阈值,然后利用双阈值算法对图像进行边缘检测;S5:锐化处理,并连接边缘,得到最终的边缘图像。本发明使用带权中值滤波代替高斯滤波,使用四个方向的偏导数求梯度幅值和方向,使用梯度直方图确定高低阈值,该方法降低了误检率,提高了检测

一种基于改进canny算法的工业图像检测方法.pdf
本发明涉及一种基于改进canny算法的工业图像检测方法,通过将图像中的每个点转换为RGB三维空间中的向量,计算向量之间的向量相似度和欧式距离,根据向量之间的相似度和欧式距离建立坐标系,对向量进行聚类得到不同类别的图像,获取每类图像与原图像的差图,对差图进行插值补全,计算出补全后的差图的色彩不连续性和纹理不连续性,综合得到补全后的差图的不连续性,根据不连续性最小的差图得到噪声图像和噪声概率图,将噪声概率图中超过阈值的概率值对应的像素点进行密度聚类,根据密度分布设置不同尺寸的高斯核进行滤波,对图像检测中的高斯
一种基于Retinex‑分水岭‑Canny算子的红外图像边缘检测方法.pdf
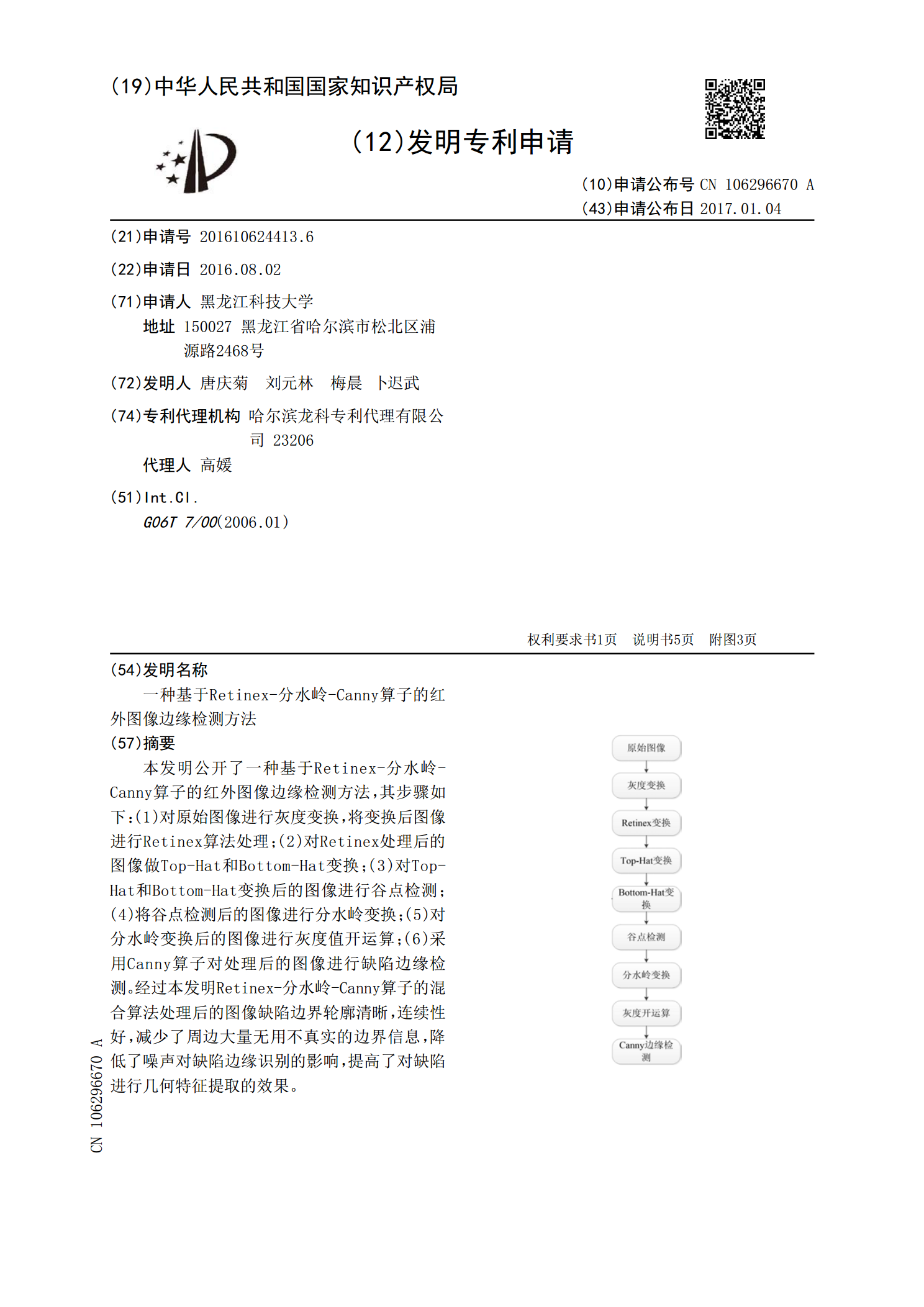
本发明公开了一种基于Retinex‑分水岭‑Canny算子的红外图像边缘检测方法,其步骤如下:(1)对原始图像进行灰度变换,将变换后图像进行Retinex算法处理;(2)对Retinex处理后的图像做Top‑Hat和Bottom‑Hat变换;(3)对Top‑Hat和Bottom‑Hat变换后的图像进行谷点检测;(4)将谷点检测后的图像进行分水岭变换;(5)对分水岭变换后的图像进行灰度值开运算;(6)采用Canny算子对处理后的图像进行缺陷边缘检测。经过本发明Retinex‑分水岭‑Canny算子的混合算法
基于改进Canny边缘检测算法的受电弓磨耗检测方法.pdf
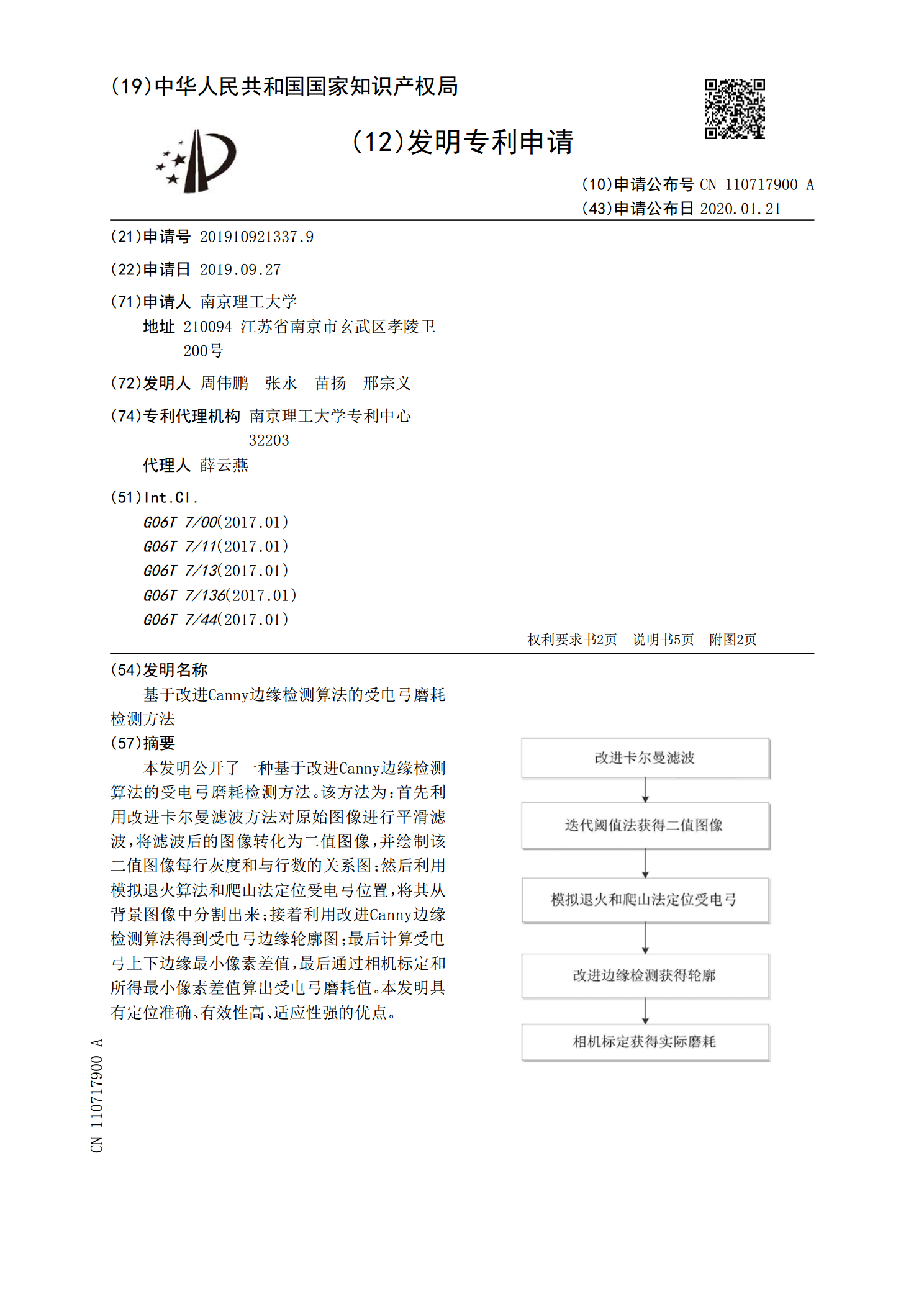
本发明公开了一种基于改进Canny边缘检测算法的受电弓磨耗检测方法。该方法为:首先利用改进卡尔曼滤波方法对原始图像进行平滑滤波,将滤波后的图像转化为二值图像,并绘制该二值图像每行灰度和与行数的关系图;然后利用模拟退火算法和爬山法定位受电弓位置,将其从背景图像中分割出来;接着利用改进Canny边缘检测算法得到受电弓边缘轮廓图;最后计算受电弓上下边缘最小像素差值,最后通过相机标定和所得最小像素差值算出受电弓磨耗值。本发明具有定位准确、有效性高、适应性强的优点。