
基于改进Canny边缘检测算法的受电弓磨耗检测方法.pdf

书生****35

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于改进Canny边缘检测算法的受电弓磨耗检测方法.pdf
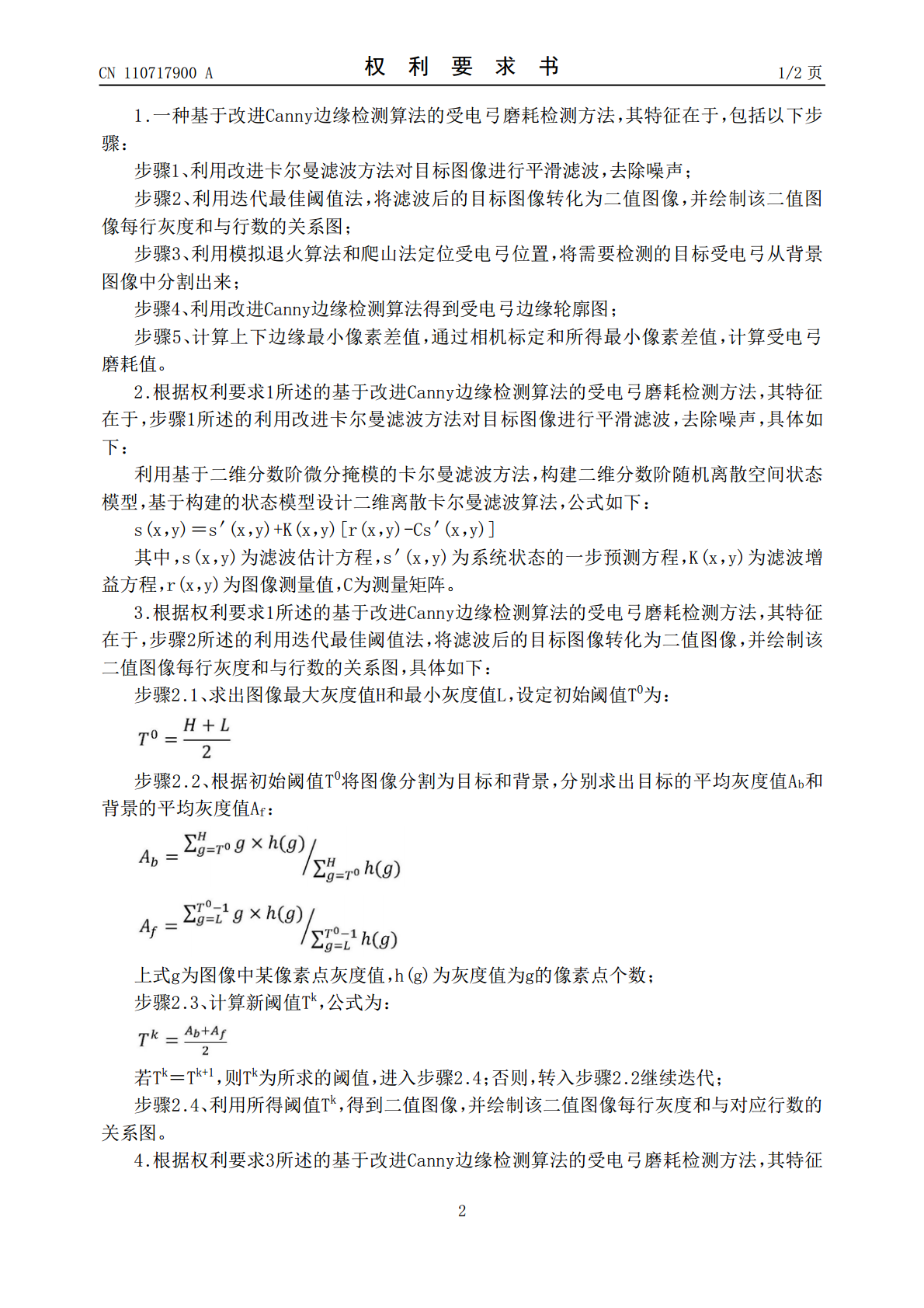
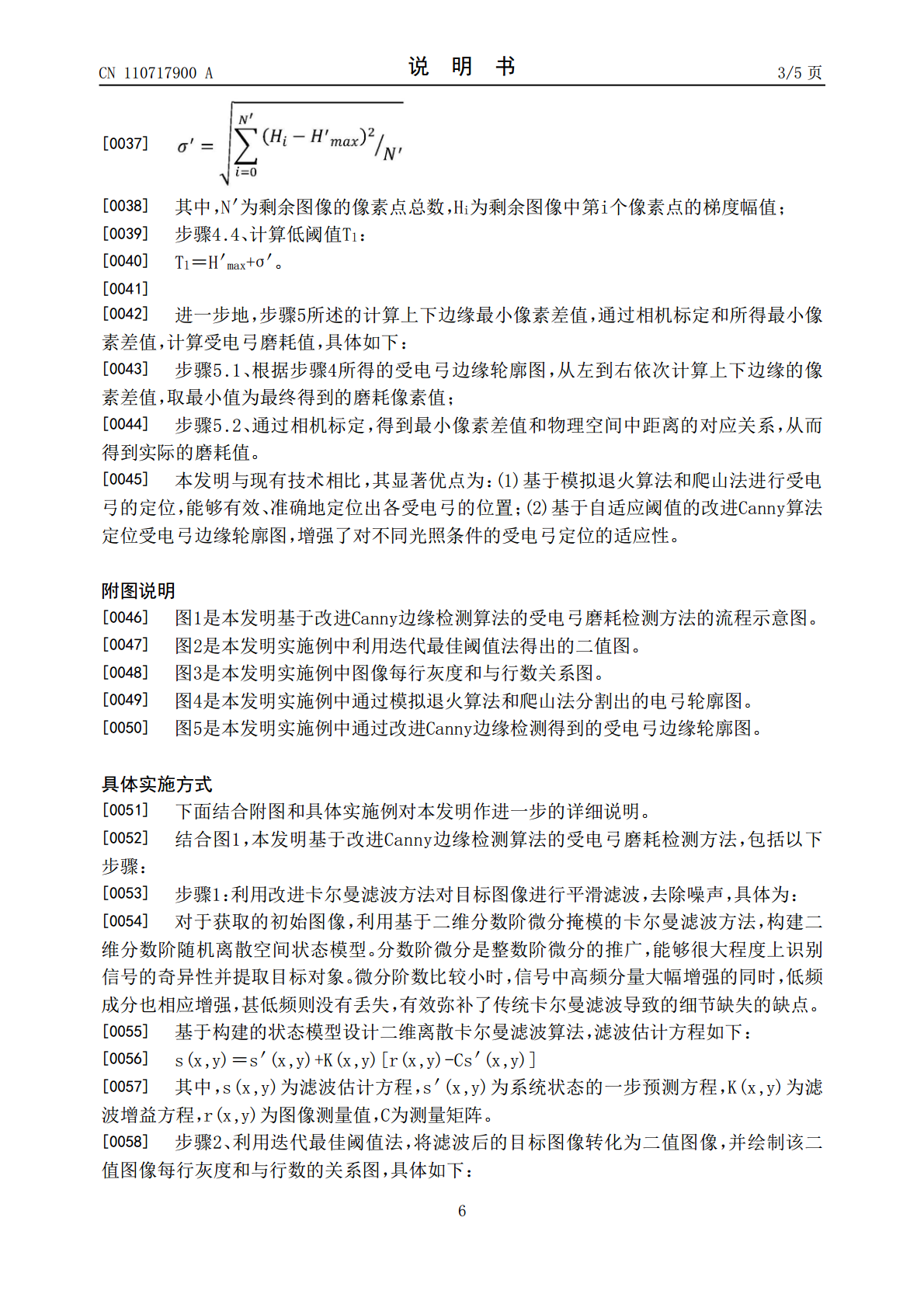
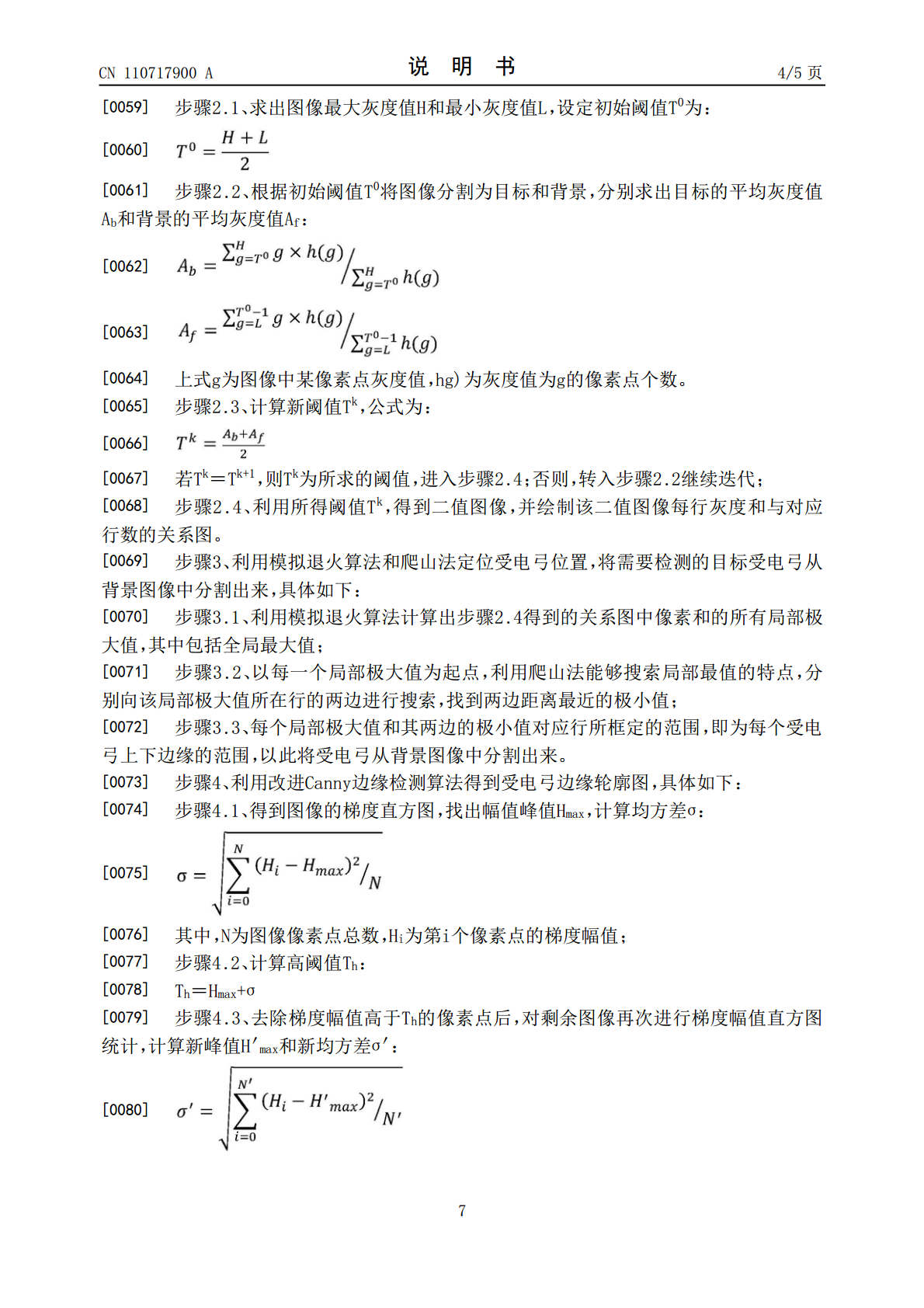
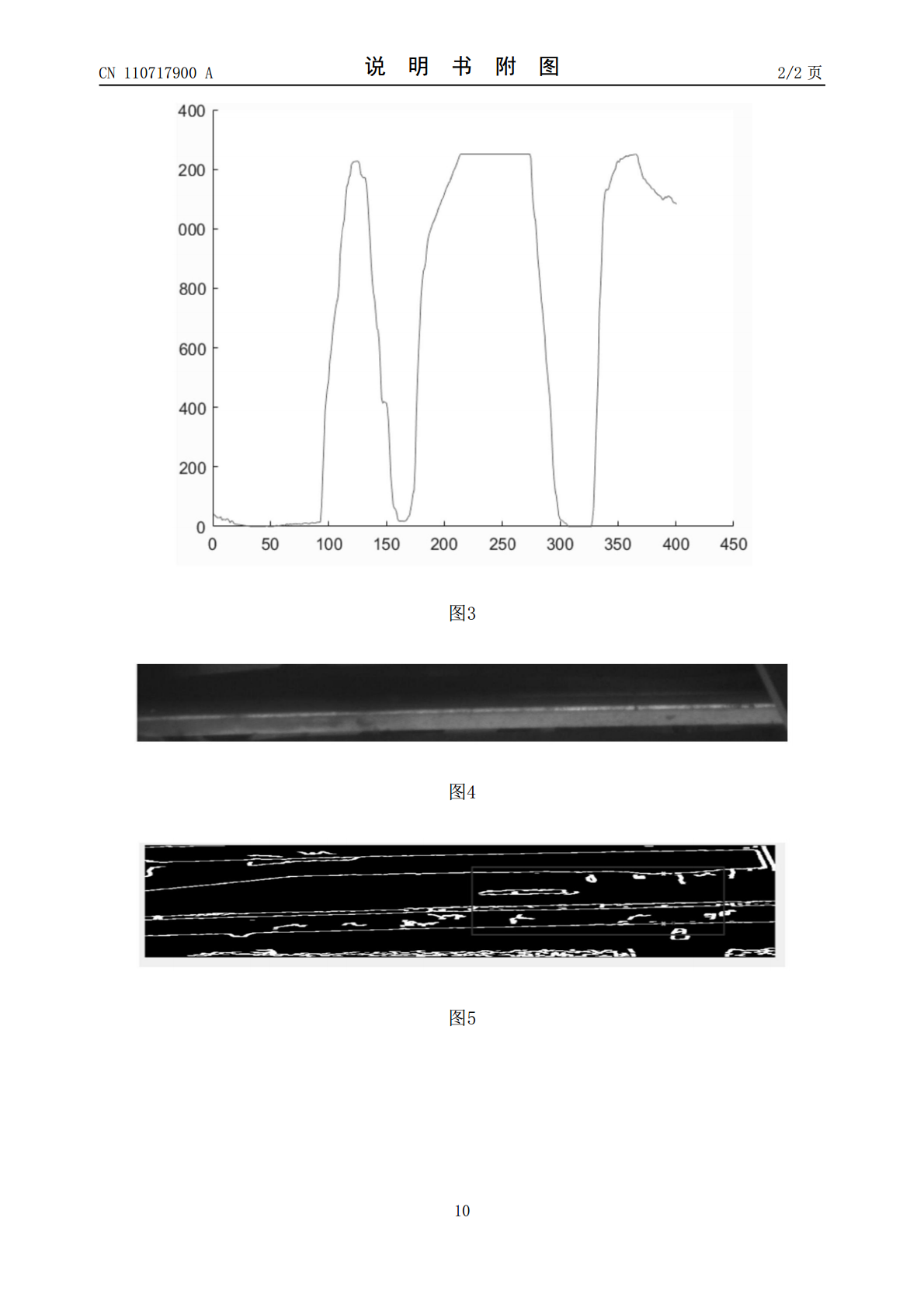
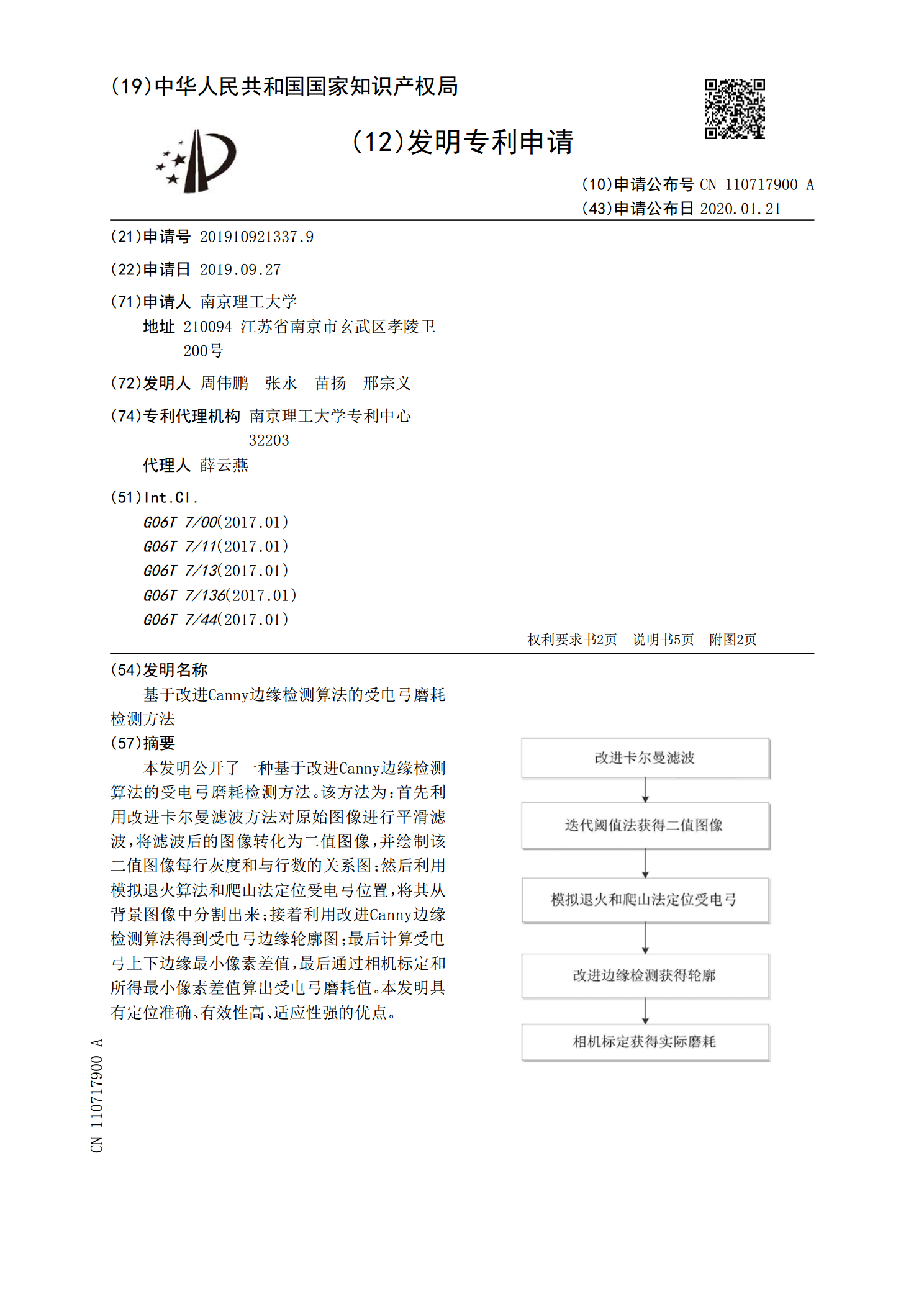
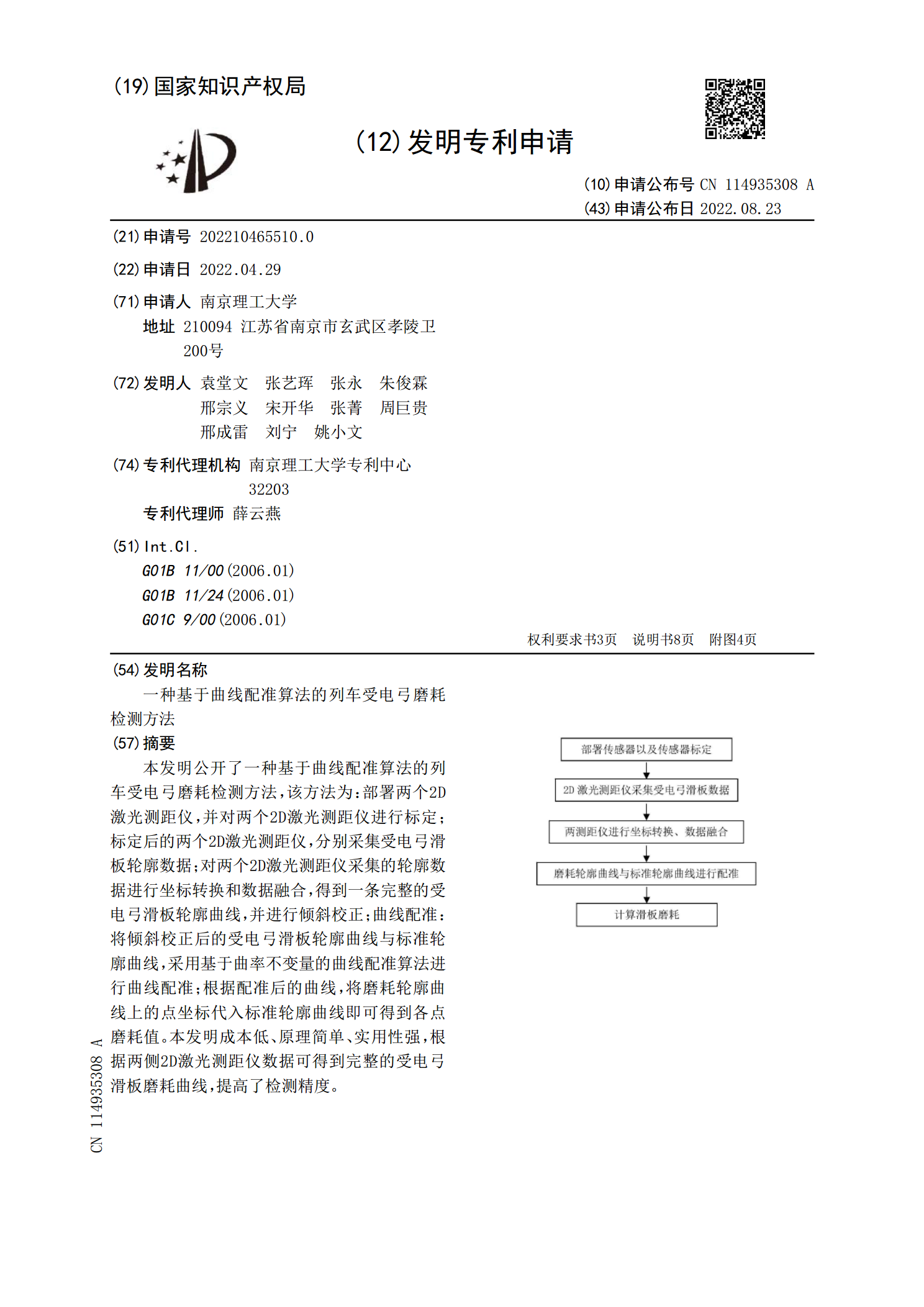
本发明公开了一种基于改进Canny边缘检测算法的受电弓磨耗检测方法。该方法为:首先利用改进卡尔曼滤波方法对原始图像进行平滑滤波,将滤波后的图像转化为二值图像,并绘制该二值图像每行灰度和与行数的关系图;然后利用模拟退火算法和爬山法定位受电弓位置,将其从背景图像中分割出来;接着利用改进Canny边缘检测算法得到受电弓边缘轮廓图;最后计算受电弓上下边缘最小像素差值,最后通过相机标定和所得最小像素差值算出受电弓磨耗值。本发明具有定位准确、有效性高、适应性强的优点。

基于改进Canny算法的工件边缘检测方法.docx
基于改进Canny算法的工件边缘检测方法基于改进Canny算法的工件边缘检测方法摘要:工件边缘检测在图像处理中具有重要的应用价值。Canny算法作为边缘检测的传统方法,在实际应用中仍面临一些挑战。本论文介绍了一种基于改进Canny算法的工件边缘检测方法,通过优化Canny算法的四个关键步骤,包括图像滤波、计算梯度、非极大值抑制和双阈值滞后判断,实现更准确、鲁棒和高效的工件边缘检测。关键词:工件边缘检测,Canny算法,图像滤波,计算梯度,非极大值抑制,双阈值滞后判断。一、引言工件边缘检测是机器视觉和图像处

基于改进Canny算法的铁轨边缘检测.docx
基于改进Canny算法的铁轨边缘检测摘要:铁路交通系统作为一种重要的运输方式,具有较高的安全性、可靠性和效率。铁路轨道的运行平稳性和安全性得到保证,其中铁路边缘检测算法是实现铁路运行稳定和安全的重要组成部分。本文介绍了铁路边缘检测算法的研究现状及其意义,分析了Canny边缘检测算法的基本原理及其存在的问题,提出了针对铁路边缘检测的改进Canny算法,并从实验结果中表明方法的有效性以及实用性。改进后的Canny算法在保证铁路边缘检测准确性的情况下,可大大减少边缘漏检率和误检率,提高了边缘检测效率和运算速度。

基于Canny的改进图像边缘检测算法.docx
基于Canny的改进图像边缘检测算法基于Canny的改进图像边缘检测算法摘要:图像边缘检测是计算机视觉和图像处理中的重要任务之一。Canny边缘检测算法是一种经典的方法,具有较好的边缘检测性能。然而,Canny算法在一些特定情况下仍存在一定的缺陷。因此,为了进一步改进Canny算法的性能,有必要进行一些改进。本文提出了一种基于Canny的改进图像边缘检测算法,通过引入自适应阈值和非最大值抑制等技术,提高了边缘检测的准确性和鲁棒性。1.引言图像边缘检测作为图像处理的基本任务之一,对于计算机视觉和模式识别等领
一种基于曲线配准算法的列车受电弓磨耗检测方法.pdf
本发明公开了一种基于曲线配准算法的列车受电弓磨耗检测方法,该方法为:部署两个2D激光测距仪,并对两个2D激光测距仪进行标定;标定后的两个2D激光测距仪,分别采集受电弓滑板轮廓数据;对两个2D激光测距仪采集的轮廓数据进行坐标转换和数据融合,得到一条完整的受电弓滑板轮廓曲线,并进行倾斜校正;曲线配准:将倾斜校正后的受电弓滑板轮廓曲线与标准轮廓曲线,采用基于曲率不变量的曲线配准算法进行曲线配准;根据配准后的曲线,将磨耗轮廓曲线上的点坐标代入标准轮廓曲线即可得到各点磨耗值。本发明成本低、原理简单、实用性强,根据两