
一种改进的图像边缘检测方法.pdf

俊英****22

1/6
2/6

3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种改进的图像边缘检测方法.pdf
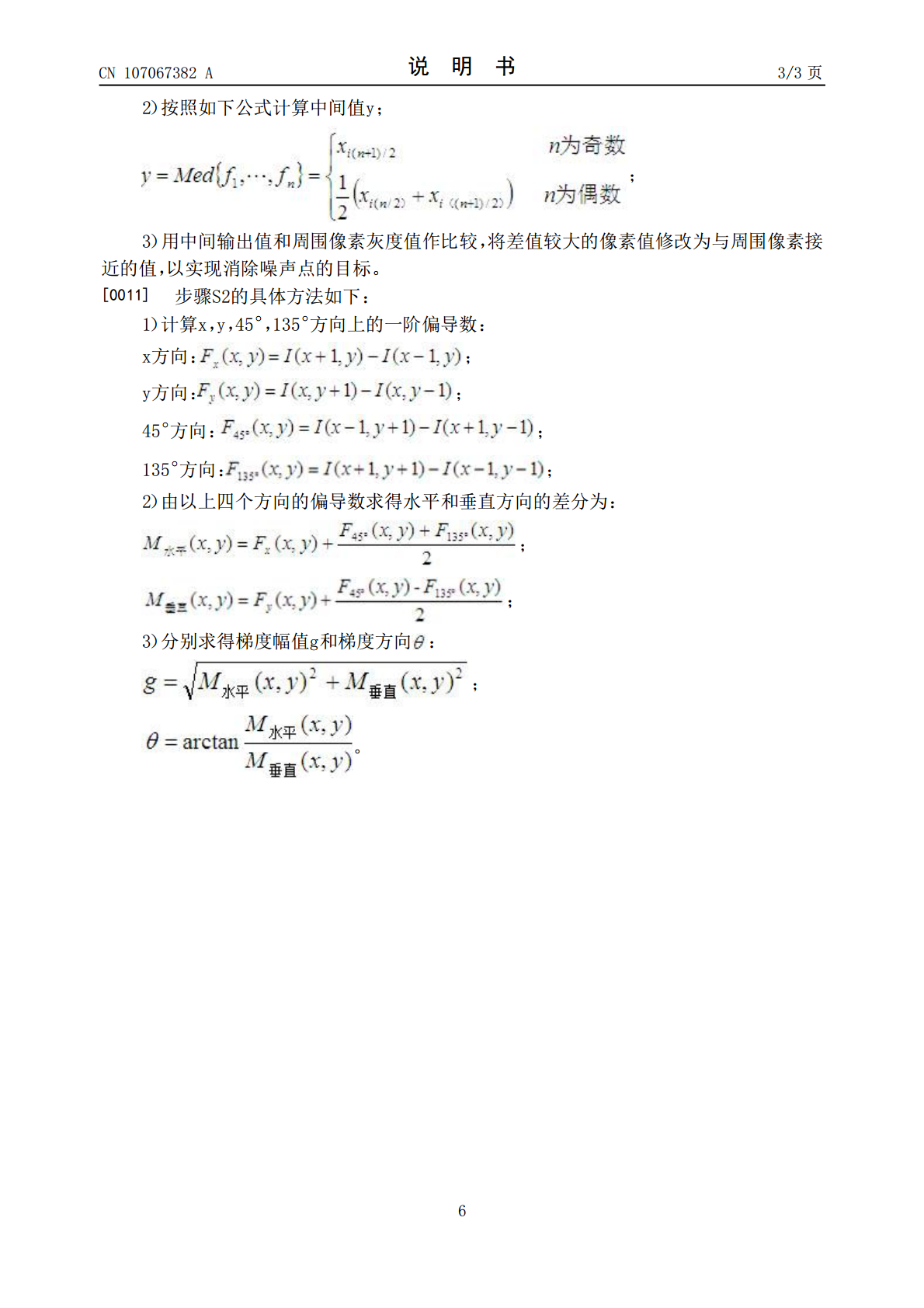
本发明公开了一种改进的图像边缘检测方法,包括以下步骤:S1:对图像进行平滑处理,使用改进的中值滤波器抑制噪声;S2:通过x,y,45°,135°方向上的一阶偏导数,求出水平和垂直方向的差分,进而求得梯度幅值和梯度方向;S3:对梯度幅值进行非极大值抑制;S4:利用梯度直方图求出高阈值和低阈值,然后利用双阈值算法对图像进行边缘检测;S5:锐化处理,并连接边缘,得到最终的边缘图像。本发明使用带权中值滤波代替高斯滤波,使用四个方向的偏导数求梯度幅值和方向,使用梯度直方图确定高低阈值,该方法降低了误检率,提高了检测
一种可抗噪声的改进Canny图像边缘检测方法.pdf
本发明公开了一种可抗噪声的改进Canny图像边缘检测方法,改进算法在Canny算法的基础上,首先结合自适应中值滤波替代高斯滤波对图像降噪,从而较好地滤除椒盐噪声干扰;然后结合最大类间方差法和最大熵法,改进了双阈值选取方法,得到高低阈值,实现对图像的边缘检测,使目标图像在尽可能地保留边缘信息的同时,又过滤掉不必要的干扰边缘。本发明实现了在椒盐噪声污染的情况下图像边缘的检测和一种适应性比较强的双阈值选取方法,应用参考价值高。
一种图像边缘检测方法.pdf
一种图像边缘检测方法属于图像提取方法技术领域,尤其涉及一种图像边缘检测方法。本发明提供一种定位精度高的图像边缘检测方法。本发明包括以下步骤:1)选取一个初始阈值的估计值;2)利用阈值将图像分为两组;3)计算两个区域灰度值;4)选取新的阈值;5)分割图像,变成二值图像,挖空同一区域内部像素点,留下图像的轮廓,检测图像边缘。
基于窗口改进的多级中值滤波的图像边缘检测方法.pdf
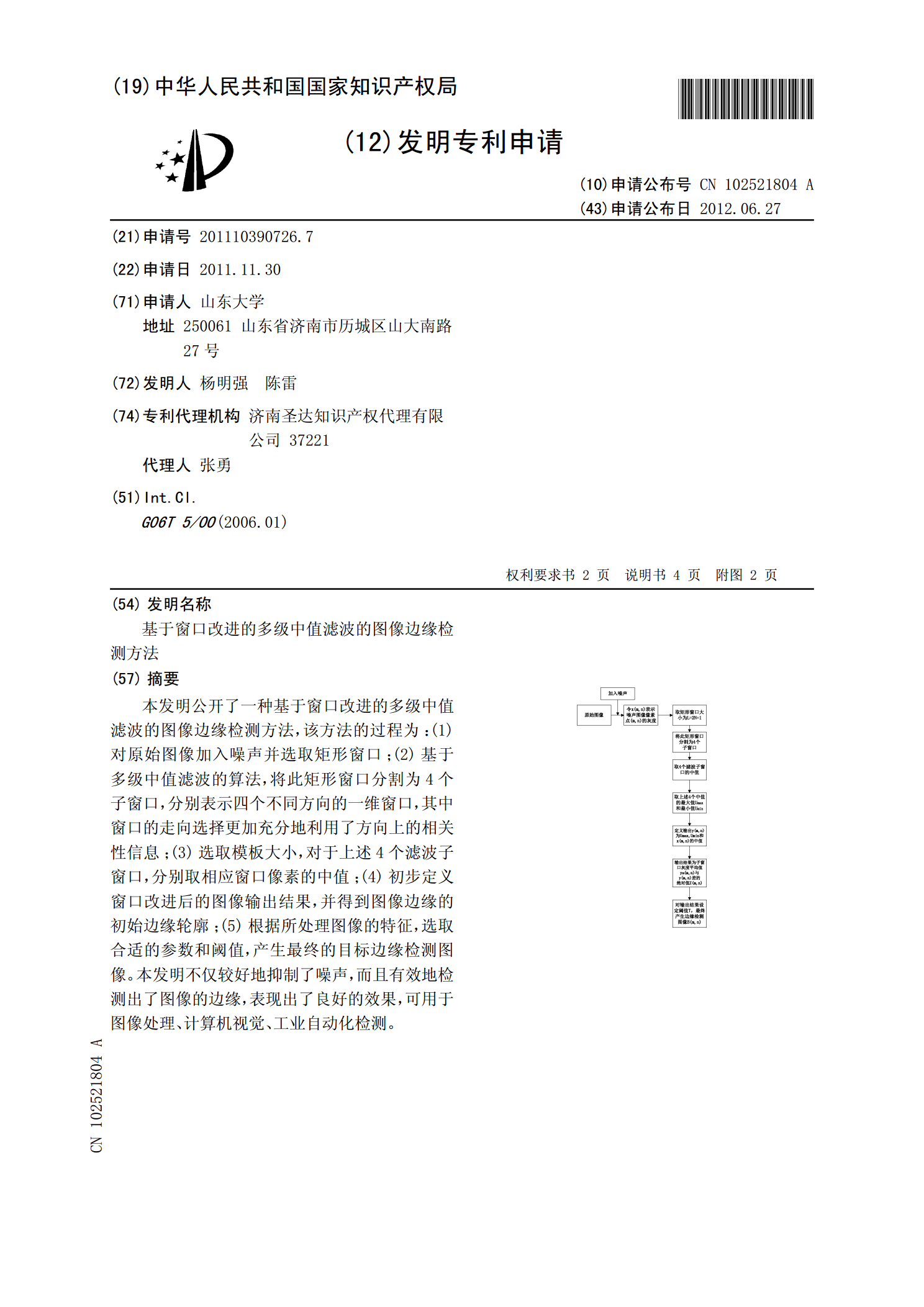
本发明公开了一种基于窗口改进的多级中值滤波的图像边缘检测方法,该方法的过程为:(1)对原始图像加入噪声并选取矩形窗口;(2)基于多级中值滤波的算法,将此矩形窗口分割为4个子窗口,分别表示四个不同方向的一维窗口,其中窗口的走向选择更加充分地利用了方向上的相关性信息;(3)选取模板大小,对于上述4个滤波子窗口,分别取相应窗口像素的中值;(4)初步定义窗口改进后的图像输出结果,并得到图像边缘的初始边缘轮廓;(5)根据所处理图像的特征,选取合适的参数和阈值,产生最终的目标边缘检测图像。本发明不仅较好地抑制了噪声,

一种图像边缘的检测方法.pdf
本发明公开了一种图像边缘的检测方法。该方法包括:滤除空间目标图像中的噪声;计算单一尺度下图像的形态学梯度;根据所述单一尺度下图像的形态学梯度,计算得到多尺度形态学梯度图像;确定多尺度形态学梯度图像中的极大值点的位置;使用过零点位置模板选取对应的形态学梯度边缘,并根据预设阈值去除伪边缘;保留目标边缘的主干并去除边缘中的碎片,得到所述空间目标图像的边缘。通过使用本发明所提供的图像边缘的检测方法,可以有效地提取空间目标图像的边缘信息。