
一种小型中高精度光纤陀螺寻北装置及方法.pdf

努力****爱敏


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种小型中高精度光纤陀螺寻北装置及方法.pdf
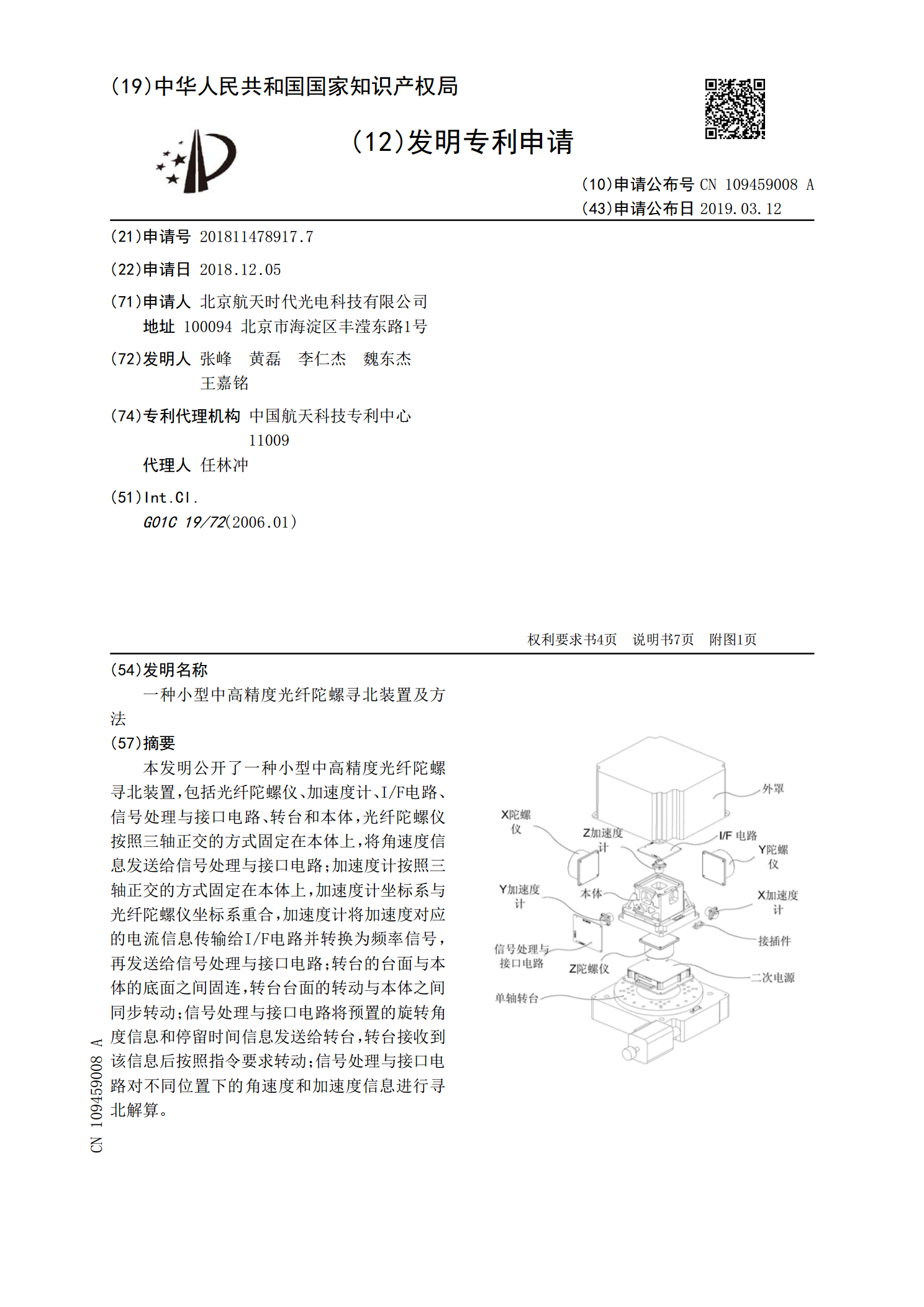
本发明公开了一种小型中高精度光纤陀螺寻北装置,包括光纤陀螺仪、加速度计、I/F电路、信号处理与接口电路、转台和本体,光纤陀螺仪按照三轴正交的方式固定在本体上,将角速度信息发送给信号处理与接口电路;加速度计按照三轴正交的方式固定在本体上,加速度计坐标系与光纤陀螺仪坐标系重合,加速度计将加速度对应的电流信息传输给I/F电路并转换为频率信号,再发送给信号处理与接口电路;转台的台面与本体的底面之间固连,转台台面的转动与本体之间同步转动;信号处理与接口电路将预置的旋转角度信息和停留时间信息发送给转台,转台接收到该信
一种光纤陀螺寻北仪.pdf
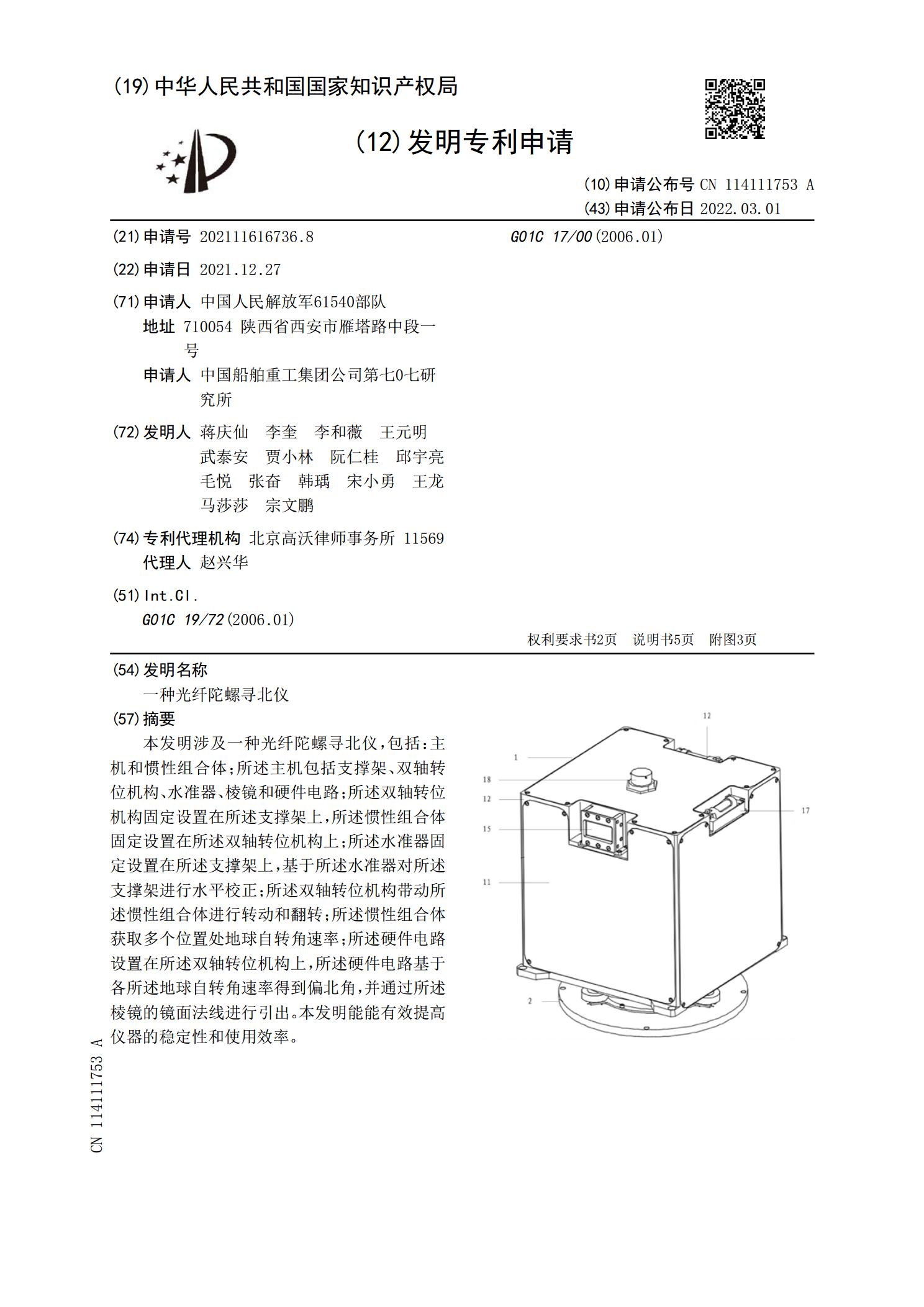
本发明涉及一种光纤陀螺寻北仪,包括:主机和惯性组合体;所述主机包括支撑架、双轴转位机构、水准器、棱镜和硬件电路;所述双轴转位机构固定设置在所述支撑架上,所述惯性组合体固定设置在所述双轴转位机构上;所述水准器固定设置在所述支撑架上,基于所述水准器对所述支撑架进行水平校正;所述双轴转位机构带动所述惯性组合体进行转动和翻转;所述惯性组合体获取多个位置处地球自转角速率;所述硬件电路设置在所述双轴转位机构上,所述硬件电路基于各所述地球自转角速率得到偏北角,并通过所述棱镜的镜面法线进行引出。本发明能能有效提高仪器的稳
一种陀螺寻北仪现场校准装置.pdf
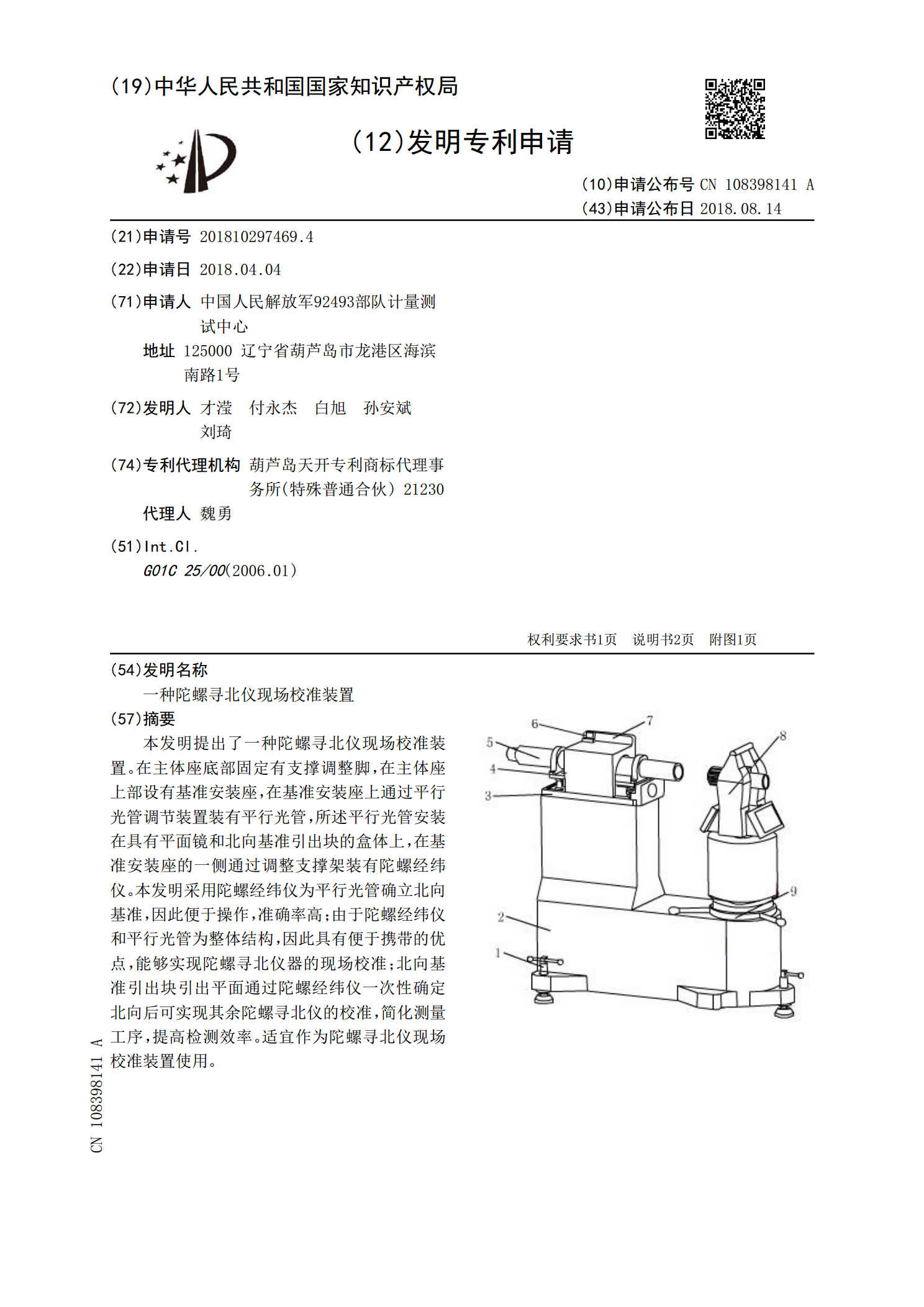
本发明提出了一种陀螺寻北仪现场校准装置。在主体座底部固定有支撑调整脚,在主体座上部设有基准安装座,在基准安装座上通过平行光管调节装置装有平行光管,所述平行光管安装在具有平面镜和北向基准引出块的盒体上,在基准安装座的一侧通过调整支撑架装有陀螺经纬仪。本发明采用陀螺经纬仪为平行光管确立北向基准,因此便于操作,准确率高;由于陀螺经纬仪和平行光管为整体结构,因此具有便于携带的优点,能够实现陀螺寻北仪器的现场校准;北向基准引出块引出平面通过陀螺经纬仪一次性确定北向后可实现其余陀螺寻北仪的校准,简化测量工序,提高检测
一种光纤陀螺光纤熔点保护方法及装置.pdf
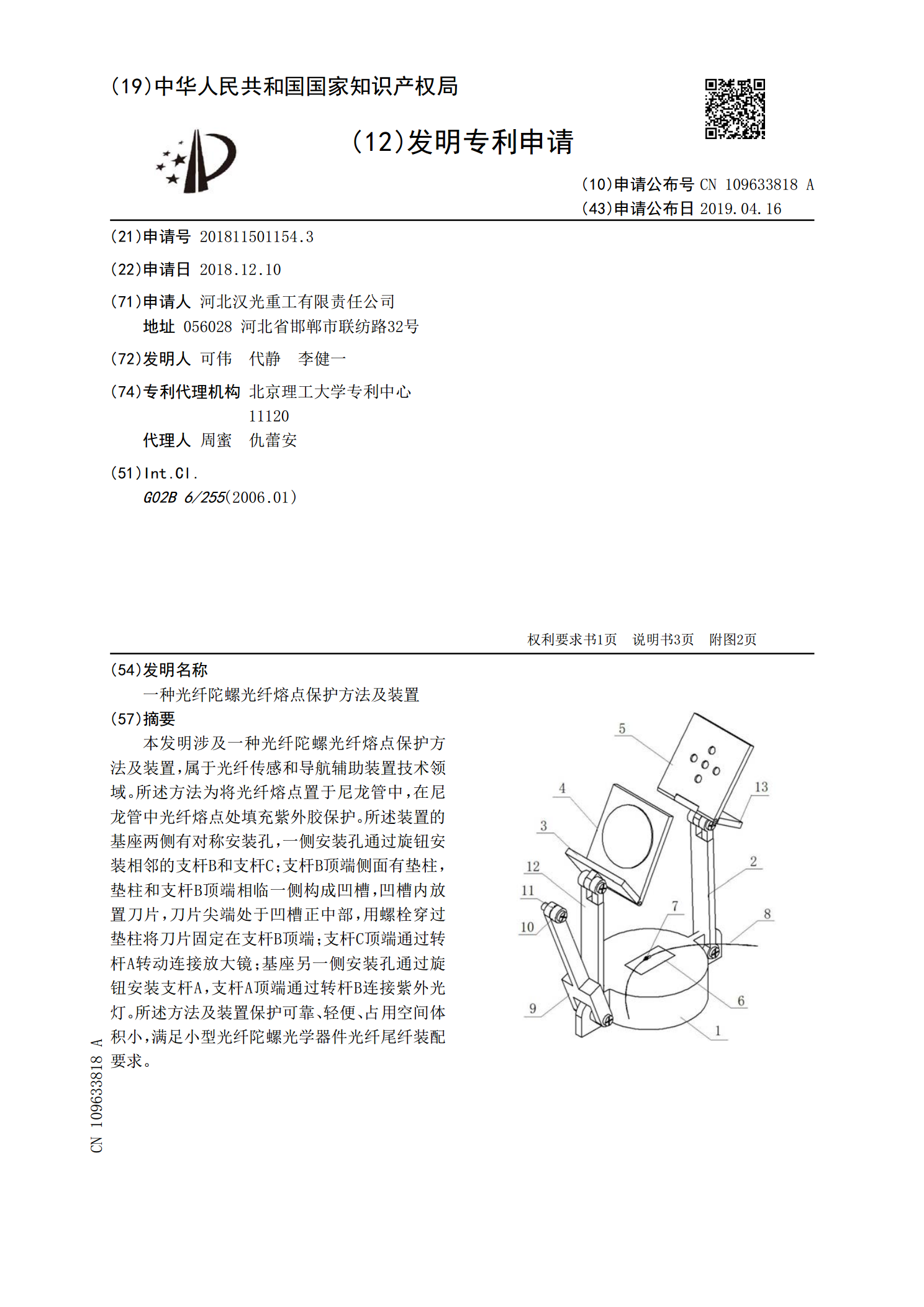
本发明涉及一种光纤陀螺光纤熔点保护方法及装置,属于光纤传感和导航辅助装置技术领域。所述方法为将光纤熔点置于尼龙管中,在尼龙管中光纤熔点处填充紫外胶保护。所述装置的基座两侧有对称安装孔,一侧安装孔通过旋钮安装相邻的支杆B和支杆C;支杆B顶端侧面有垫柱,垫柱和支杆B顶端相临一侧构成凹槽,凹槽内放置刀片,刀片尖端处于凹槽正中部,用螺栓穿过垫柱将刀片固定在支杆B顶端;支杆C顶端通过转杆A转动连接放大镜;基座另一侧安装孔通过旋钮安装支杆A,支杆A顶端通过转杆B连接紫外光灯。所述方法及装置保护可靠、轻便、占用空间体积

光纤陀螺经纬仪及其寻北方法.pdf
本发明涉及一种光纤陀螺经纬仪及其寻北方法,光纤陀螺经纬仪包括光纤陀螺和经纬仪,本发明中的经纬仪涵盖全站仪。光纤陀螺安装在经纬仪的水平旋转部,该光纤陀螺闭合光路法向与经纬仪水平旋转轴垂直,经纬仪底座固定部分外侧安装一个经纬仪底座齿轮,该经纬仪底座齿轮通过齿轮组连接一个安装在经纬仪水平旋转部上的驱动马达。光纤陀螺经纬仪寻北方法包括动态寻北和静态寻北。本发明是一种结构紧凑、体积小、重量轻、适合单人携带在地形复杂地区使用的光纤陀螺经纬仪。本仪器及其寻北方法具有操作简单、快捷、一键寻北、便于使用等优点。此外,本光纤