
光纤陀螺经纬仪及其寻北方法.pdf

星星****眨眼


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

光纤陀螺经纬仪及其寻北方法.pdf
本发明涉及一种光纤陀螺经纬仪及其寻北方法,光纤陀螺经纬仪包括光纤陀螺和经纬仪,本发明中的经纬仪涵盖全站仪。光纤陀螺安装在经纬仪的水平旋转部,该光纤陀螺闭合光路法向与经纬仪水平旋转轴垂直,经纬仪底座固定部分外侧安装一个经纬仪底座齿轮,该经纬仪底座齿轮通过齿轮组连接一个安装在经纬仪水平旋转部上的驱动马达。光纤陀螺经纬仪寻北方法包括动态寻北和静态寻北。本发明是一种结构紧凑、体积小、重量轻、适合单人携带在地形复杂地区使用的光纤陀螺经纬仪。本仪器及其寻北方法具有操作简单、快捷、一键寻北、便于使用等优点。此外,本光纤

基于光纤陀螺的寻北系统的研究.pptx
基于光纤陀螺的寻北系统的研究目录添加目录项标题介绍光纤陀螺概述寻北系统简介论文研究背景系统设计系统架构设计硬件设计软件设计系统调试与测试算法研究寻北算法概述算法实现过程算法性能评估实验与分析实验环境搭建实验数据采集与处理结果分析与讨论结论与展望研究成果总结未来研究方向展望感谢观看

光纤陀螺及其寻北应用中的信号处理方法研究的任务书.docx
光纤陀螺及其寻北应用中的信号处理方法研究的任务书任务书一、研究背景光纤陀螺是一种基于旋转惯性的导航仪器,在军事、工程、机械等领域有广泛的应用。由于其具有高精度、高稳定性、高可靠性等优点,已成为导航、定位和测量中不可缺少的重要工具。光纤陀螺的底座采用光纤传感器进行检测,从而实现对自身的旋转角速度进行测量。然而,由于环境因素、噪声干扰等原因,光纤陀螺的测量信号存在失真、漂移等问题,影响其寻北精度。因此,研究光纤陀螺测量信号处理方法,提高精度和稳定性,对于提高陀螺仪的实际应用价值具有重要意义。二、研究任务及目标
一种光纤陀螺寻北仪.pdf
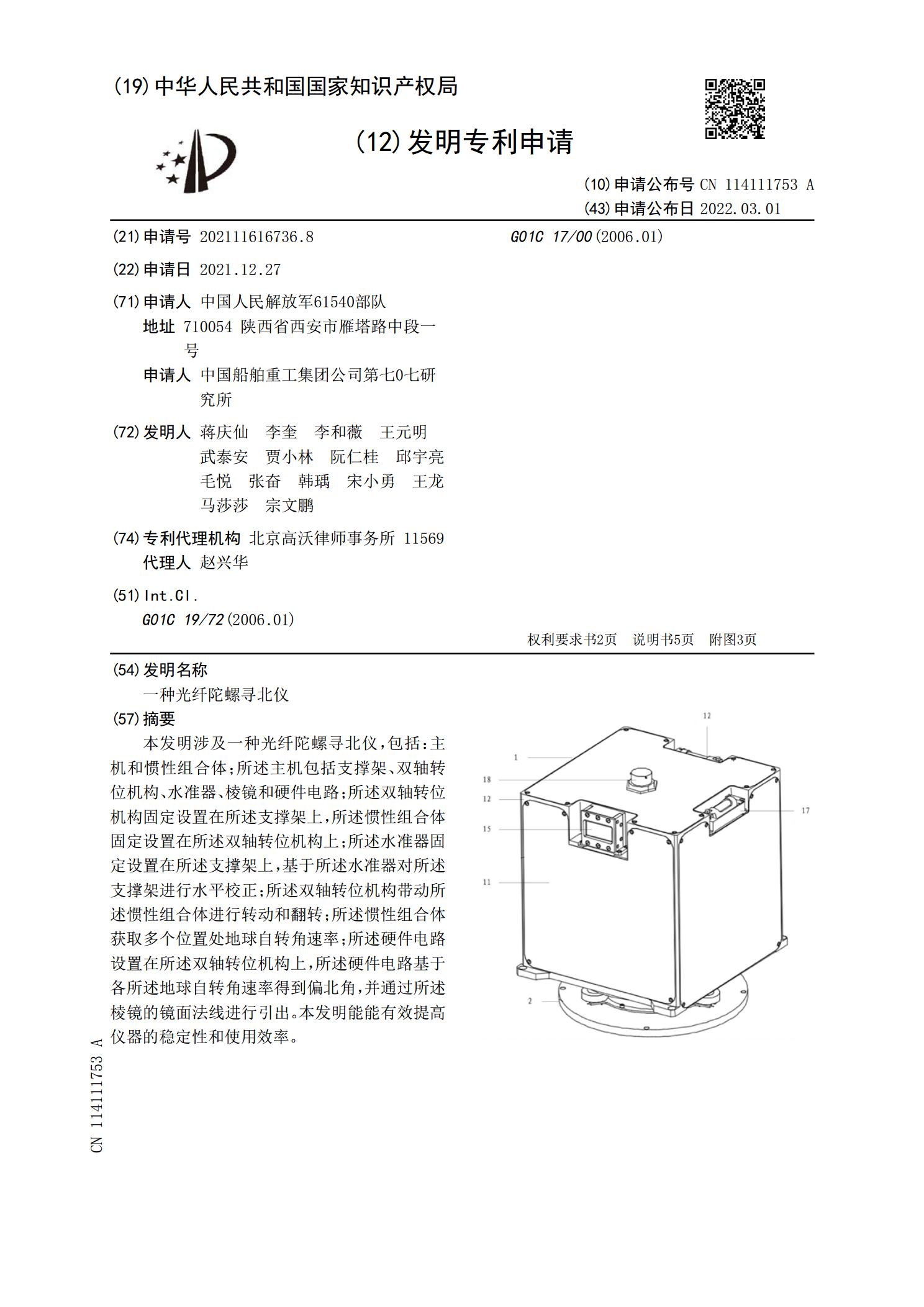
本发明涉及一种光纤陀螺寻北仪,包括:主机和惯性组合体;所述主机包括支撑架、双轴转位机构、水准器、棱镜和硬件电路;所述双轴转位机构固定设置在所述支撑架上,所述惯性组合体固定设置在所述双轴转位机构上;所述水准器固定设置在所述支撑架上,基于所述水准器对所述支撑架进行水平校正;所述双轴转位机构带动所述惯性组合体进行转动和翻转;所述惯性组合体获取多个位置处地球自转角速率;所述硬件电路设置在所述双轴转位机构上,所述硬件电路基于各所述地球自转角速率得到偏北角,并通过所述棱镜的镜面法线进行引出。本发明能能有效提高仪器的稳

基于光纤陀螺的教学实验寻北仪.docx
基于光纤陀螺的教学实验寻北仪标题:基于光纤陀螺的教学实验寻北仪摘要:教学实验寻北仪是一种基于光纤陀螺原理的设备,能够在地面及地下环境中通过光纤陀螺的测量,快速准确地确定地理方向。本文将介绍寻北仪的原理、结构以及实验操作方法,并对其在教学中的应用进行分析。关键词:光纤陀螺、寻北仪、教学实验、地理方向1.引言寻北仪作为一种基于光纤陀螺原理的设备,能够在地面及地下环境中通过测量光纤陀螺的角速度和角位移,快速准确地确定地理方向。其在教学中具有重要的应用价值。本文将详细介绍寻北仪的原理、结构以及实验操作方法,并探讨