
基于多模态控制的飞翼无人机机动飞行控制方法.pdf

新月****姐a


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共43页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于多模态控制的飞翼无人机机动飞行控制方法.pdf
本发明提供一种基于多模态控制的飞翼无人机机动飞行控制方法,包括如下步骤:步骤1:对数个典型机动动作进行动力学分析,从中提取出多个机动子模态;步骤2:先进行针对飞翼无人机的纵向、横向、航向三通道的增稳设计,然后设计各机动子模态的控制器;步骤3:通过不同机动子模态的组合,即机动子模态控制器的切换,来实现不同的机动动作;步骤4:针对机动时的耦合问题,将前馈解耦补偿设计与机动子模态控制器结合。相比于目前只停留在理论研究阶段的先进控制方法,本发明采用的RSLQR与PID控制方法均是有实际工程应用基础的,都已经在实际

多旋翼无人机飞行控制方法讲解.docx
多旋翼无人机飞行控制方法讲解多旋翼无人机飞行控制方法讲解为了克服某些线性控制方法的限制,一些非线性的控制方法被提出并且被运用到飞行器的控制中。下面是小编为大家分享多旋翼无人机飞行控制方法讲解,欢迎大家阅读浏览。1线性飞行控制方法常规的飞行器控制方法以及早期的对飞行器控制的尝试都是建立在线性飞行控制理论上的,这其中就又有诸如PID、H∞、LQR以及增益调度法。1.PIDPID控制属于传统控制方法,是目前最成功、用的最广泛的控制方法之一。其控制方法简单,无需前期建模工作,参数物理意义明确,适用于飞

基于增益调度的倾转旋翼无人机模态转换飞行控制的开题报告.docx
基于增益调度的倾转旋翼无人机模态转换飞行控制的开题报告一、研究背景近年来,随着无人机技术的不断发展,倾转旋翼无人机作为一种新型无人机深受研究者们的关注。倾转旋翼无人机可以实现垂直起降和水平飞行,并能够在低速飞行和飞行中转换模态,具有灵活性和适应性等优点,因此在实际应用中有着很广泛的应用。但是,转换过程中存在控制困难、动力匹配、结构设计等诸多问题亟待解决。本课题旨在基于增益调度的方法,探究倾转旋翼无人机的模态转换控制问题,在保证飞行安全的前提下,实现高效、稳定、平滑的模态转换,在实际应用中发挥出倾转旋翼无人

小型旋翼无人机的机动飞行控制的任务书.docx
小型旋翼无人机的机动飞行控制的任务书一、背景介绍小型旋翼无人机目前在军事和民用领域得到广泛应用,包括侦察、搜救、航拍、农业等。在这些任务中,需要对小型旋翼无人机进行精准的机动飞行控制,以确保其能够安全、高效地完成任务。因此,机动飞行控制是小型旋翼无人机的重要研究方向之一。二、任务目的本次任务的目的是了解小型旋翼无人机机动飞行控制的基本原理和方法,掌握小型旋翼无人机的机动飞行控制技术,并在实验中进行验证和应用。三、任务内容1.了解小型旋翼无人机的机动飞行控制基本原理和方法。小型旋翼无人机的机动飞行控制主要涉
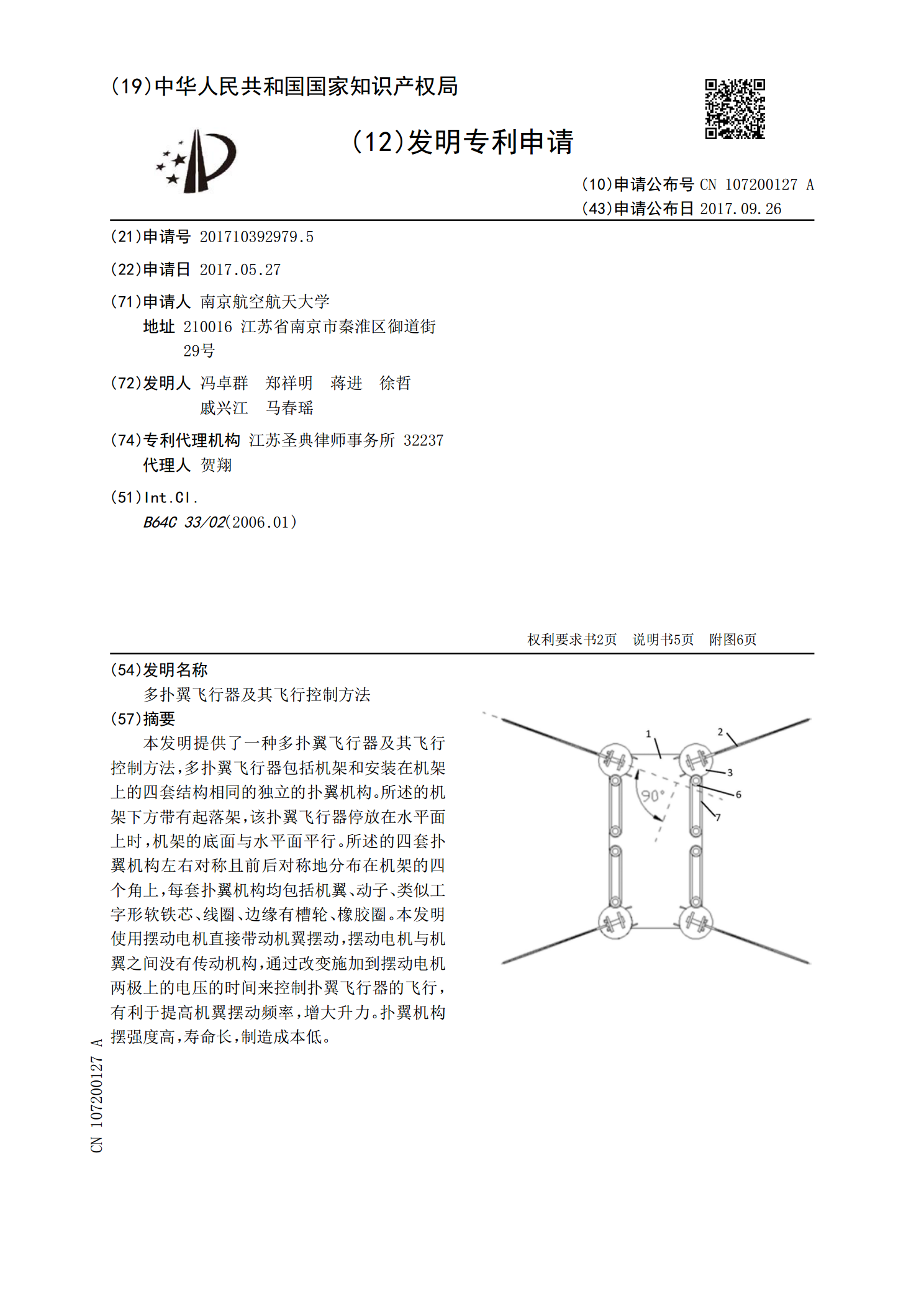
多扑翼飞行器及其飞行控制方法.pdf
本发明提供了一种多扑翼飞行器及其飞行控制方法,多扑翼飞行器包括机架和安装在机架上的四套结构相同的独立的扑翼机构。所述的机架下方带有起落架,该扑翼飞行器停放在水平面上时,机架的底面与水平面平行。所述的四套扑翼机构左右对称且前后对称地分布在机架的四个角上,每套扑翼机构均包括机翼、动子、类似工字形软铁芯、线圈、边缘有槽轮、橡胶圈。本发明使用摆动电机直接带动机翼摆动,摆动电机与机翼之间没有传动机构,通过改变施加到摆动电机两极上的电压的时间来控制扑翼飞行器的飞行,有利于提高机翼摆动频率,增大升力。扑翼机构摆强度高,