
多扑翼飞行器及其飞行控制方法.pdf

Jo****63

1/10

2/10

3/10
4/10

5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多扑翼飞行器及其飞行控制方法.pdf
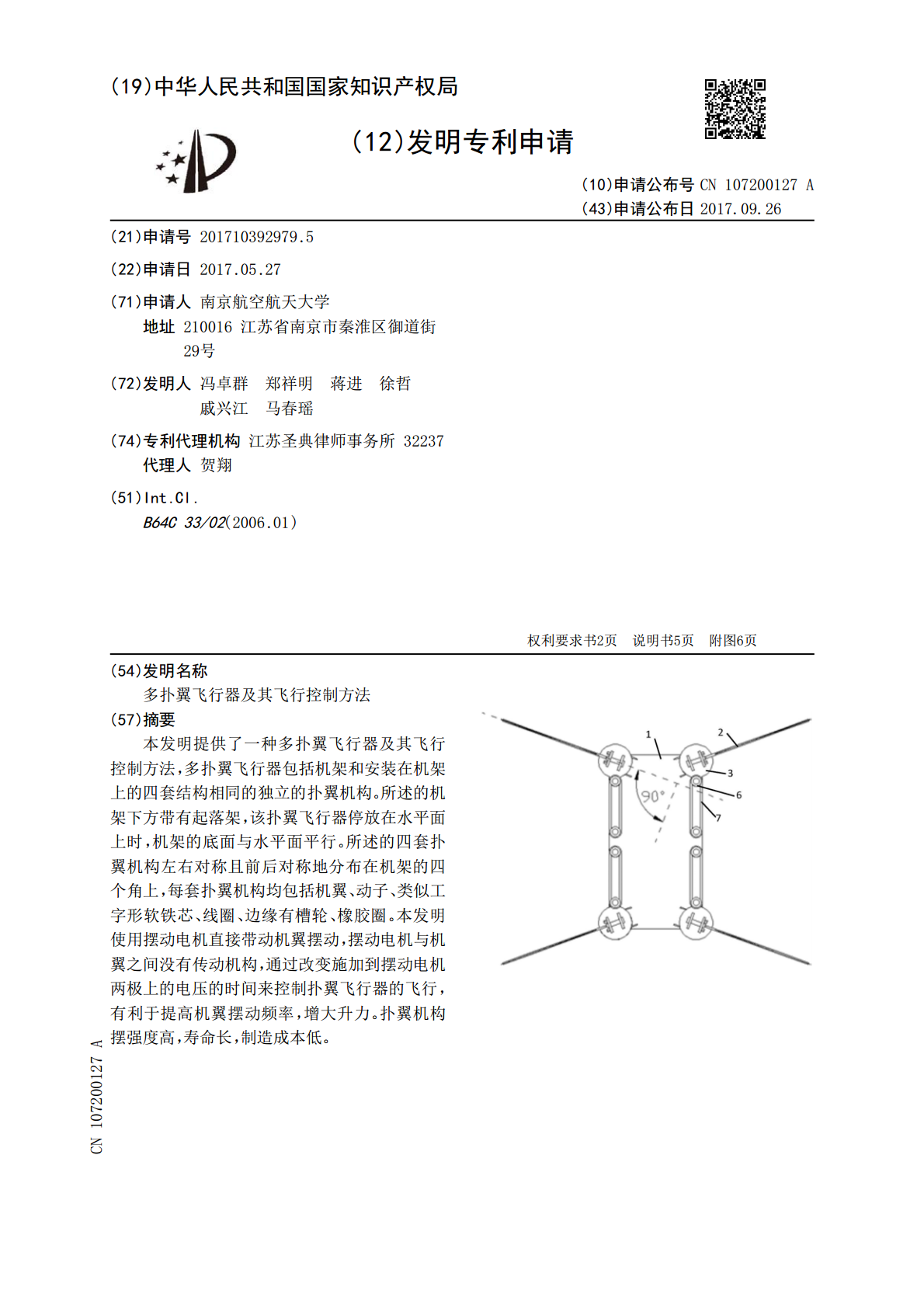
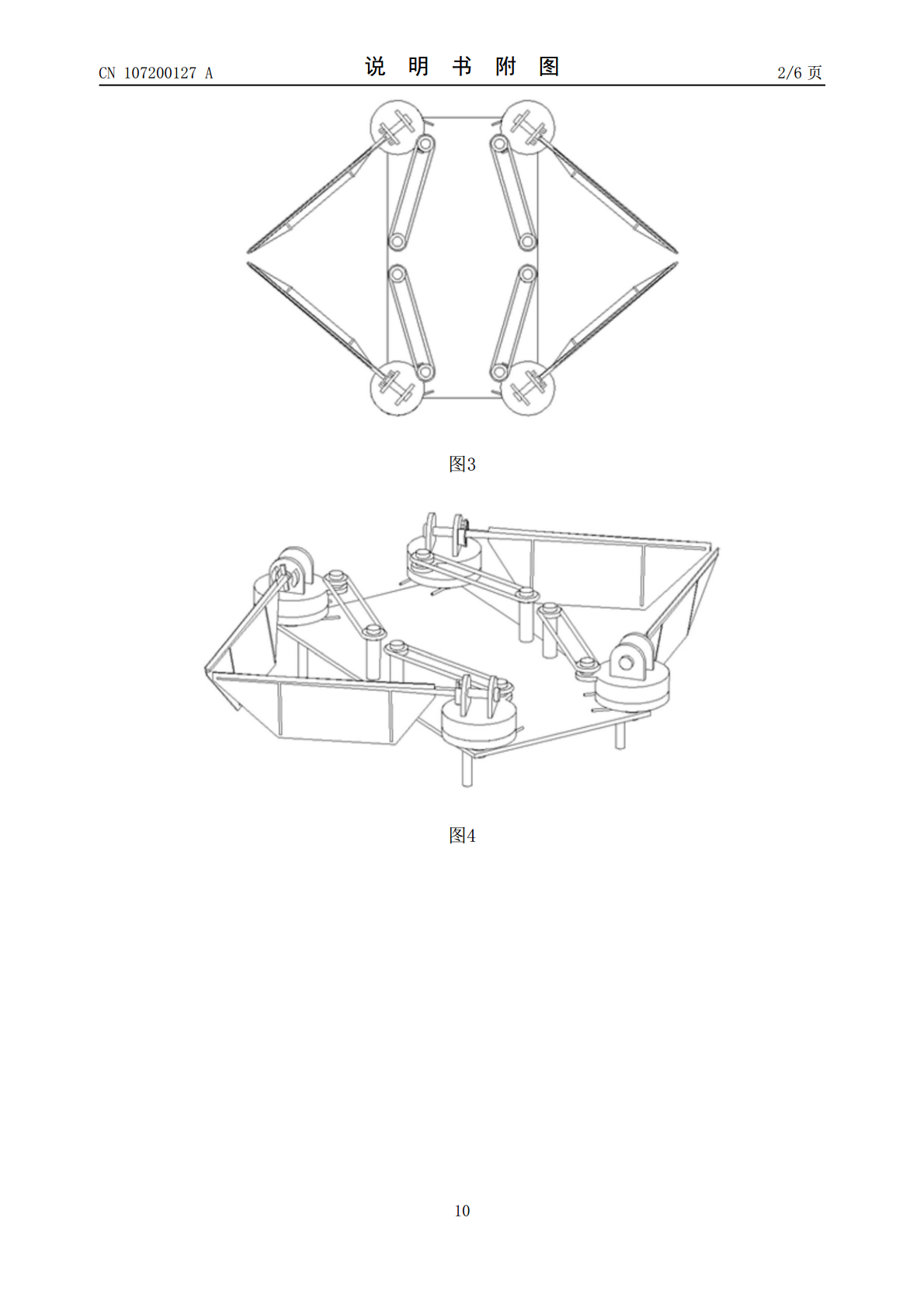
本发明提供了一种多扑翼飞行器及其飞行控制方法,多扑翼飞行器包括机架和安装在机架上的四套结构相同的独立的扑翼机构。所述的机架下方带有起落架,该扑翼飞行器停放在水平面上时,机架的底面与水平面平行。所述的四套扑翼机构左右对称且前后对称地分布在机架的四个角上,每套扑翼机构均包括机翼、动子、类似工字形软铁芯、线圈、边缘有槽轮、橡胶圈。本发明使用摆动电机直接带动机翼摆动,摆动电机与机翼之间没有传动机构,通过改变施加到摆动电机两极上的电压的时间来控制扑翼飞行器的飞行,有利于提高机翼摆动频率,增大升力。扑翼机构摆强度高,
仿生扑翼飞行器及其飞行控制方法.pdf
本发明提供了一种仿生扑翼飞行器及其飞行控制方法,仿生扑翼飞行器包括机架、连接轴和安装在机架上的两套结构相同的独立的扑翼机构。所述的机架下方带有起落架,该扑翼飞行器停放在水平面上时,机架的底面与水平面平行。每套扑翼机构均包括机翼、动子、电机座、类似工字形软铁芯、线圈、边缘有槽轮、橡胶圈、橡胶柱。本发明使用摆动电机直接带动机翼摆动,摆动电机与机翼之间没有传动机构,有利于减少扑翼飞行器的重量、能耗、噪声,通过改变施加到摆动电机两极上的电压的波形来控制扑翼飞行器的飞行,不需要复杂的控制机构来控制扑翼飞行器的飞行,
无尾扑翼飞行器及其飞行控制方法.pdf
本发明提供了一种无尾扑翼飞行器及其飞行控制方法,无尾扑翼飞行器包括机架和安装在机架上的两套结构相同的独立的扑翼机构。所述的机架下方带有起落架,该扑翼飞行器停放在水平面上时,机架的底面与水平面平行。每套扑翼机构均包括机翼、动子、类似工字形软铁芯、线圈、边缘有槽轮、橡胶圈。本发明使用摆动电机直接带动机翼摆动,摆动电机与机翼之间没有传动机构,有利于减少扑翼飞行器的重量、能耗、噪声,通过改变施加到摆动电机两极上的电压的波形来控制扑翼飞行器的飞行,不需要复杂的控制机构来控制扑翼飞行器的飞行,有利于减少扑翼飞行器的重

主动式扑翼飞行器扑翼控制的研究.docx
主动式扑翼飞行器扑翼控制的研究主动式扑翼飞行器扑翼控制的研究摘要:主动式扑翼飞行器是一种模仿鸟类翅膀扑打的飞行器,其扑打运动控制成为了科研领域的热点问题。本文通过对主动式扑翼飞行器的基本原理介绍和扑翼控制方法的研究综述,旨在为该领域的研究者提供一定的参考。关键词:主动式扑翼飞行器,扑翼控制,研究综述一、引言随着无人机技术的发展,主动式扑翼飞行器逐渐受到研究者的关注。与传统的固定翼飞行器相比,主动式扑翼飞行器在机动性和机器人学方面具有显著优势。然而,其扑翼控制仍然是一个待解决的问题。本文将重点介绍扑翼控制的
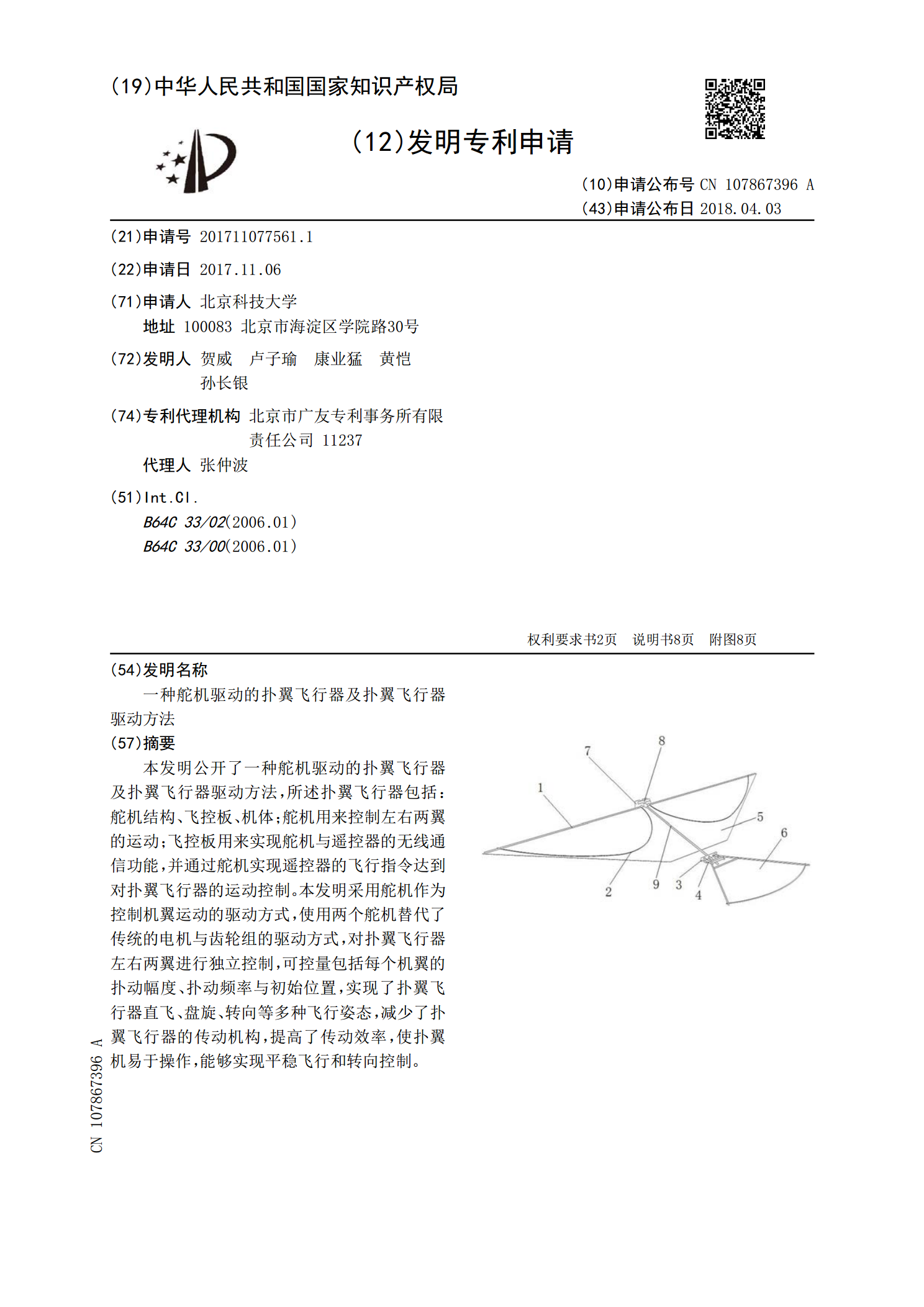
一种舵机驱动的扑翼飞行器及扑翼飞行器驱动方法.pdf
本发明公开了一种舵机驱动的扑翼飞行器及扑翼飞行器驱动方法,所述扑翼飞行器包括:舵机结构、飞控板、机体;舵机用来控制左右两翼的运动;飞控板用来实现舵机与遥控器的无线通信功能,并通过舵机实现遥控器的飞行指令达到对扑翼飞行器的运动控制。本发明采用舵机作为控制机翼运动的驱动方式,使用两个舵机替代了传统的电机与齿轮组的驱动方式,对扑翼飞行器左右两翼进行独立控制,可控量包括每个机翼的扑动幅度、扑动频率与初始位置,实现了扑翼飞行器直飞、盘旋、转向等多种飞行姿态,减少了扑翼飞行器的传动机构,提高了传动效率,使扑翼机易于操