
一种基于深度学习的雷达虚警剔除方法.pdf

慧颖****23


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于深度学习的雷达虚警剔除方法.pdf
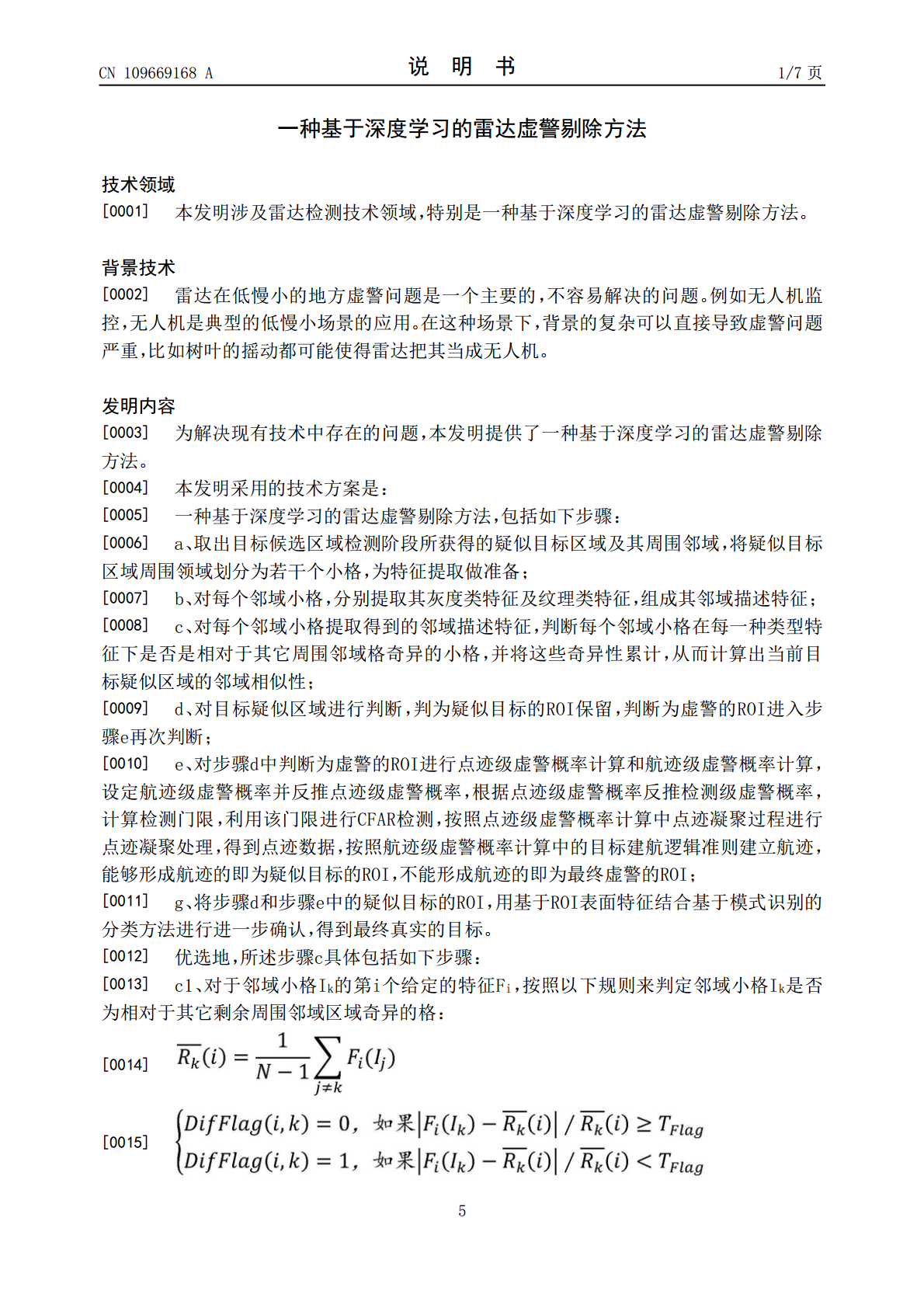
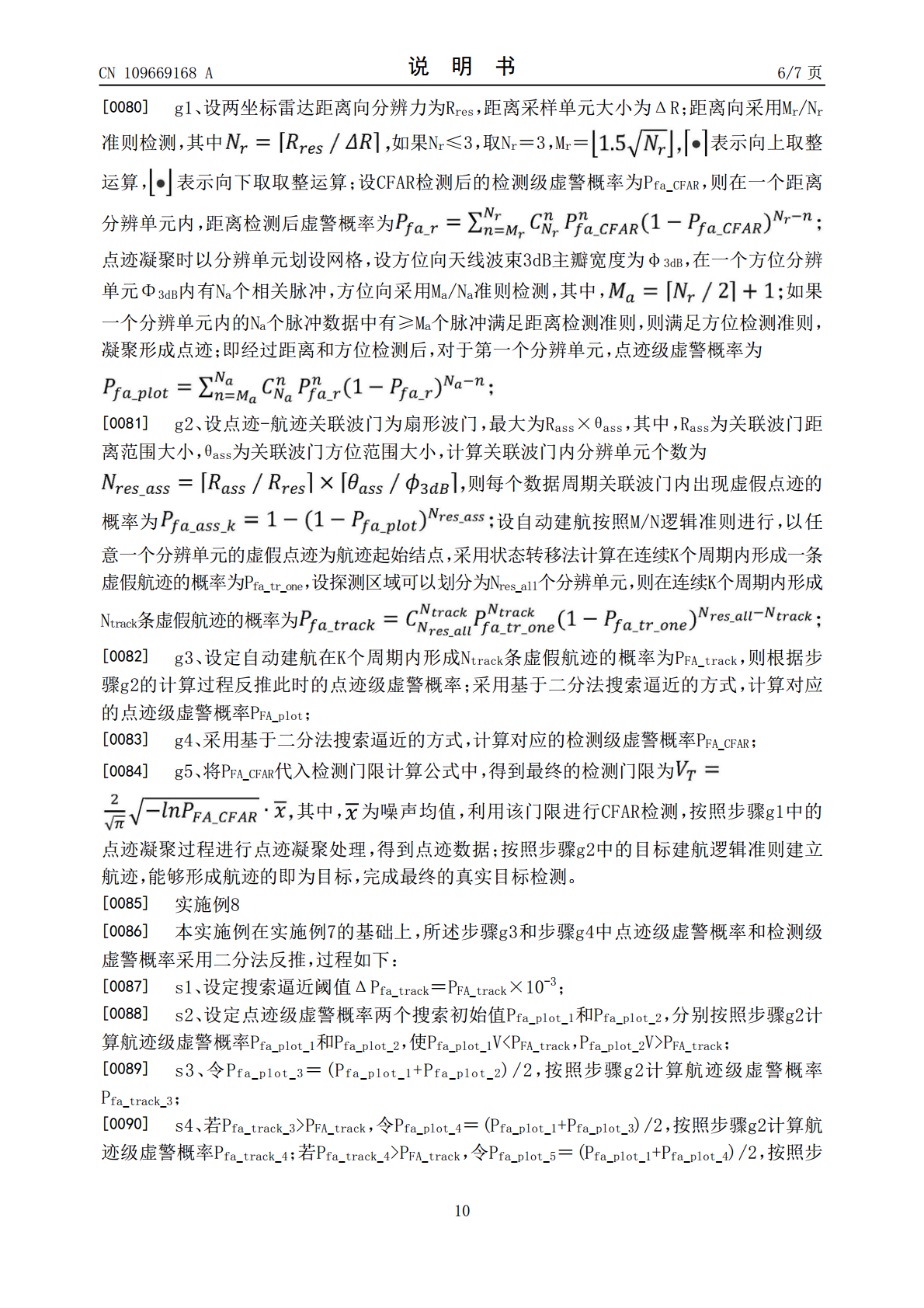
本发明公开了一种基于深度学习的雷达虚警剔除方法,包括如下步骤:a、将疑似目标区域周围领域划分为若干个小格;b、对每个邻域小格,分别提取其灰度类特征及纹理类特征,组成其邻域描述特征;c、从而计算出当前目标疑似区域的邻域相似性;d、对目标疑似区域进行判断,判为疑似目标的ROI保留,判断为虚警的ROI进入步骤e再次判断;e、对步骤d中判断为虚警的ROI进行点迹级虚警概率计算和航迹级虚警概率计算,能够形成航迹的即为疑似目标的ROI,不能形成航迹的即为最终虚警的ROI;g、将步骤d和步骤e中的疑似目标的ROI,用基
一种基于IMU的视觉障碍物检测虚警剔除方法.pdf
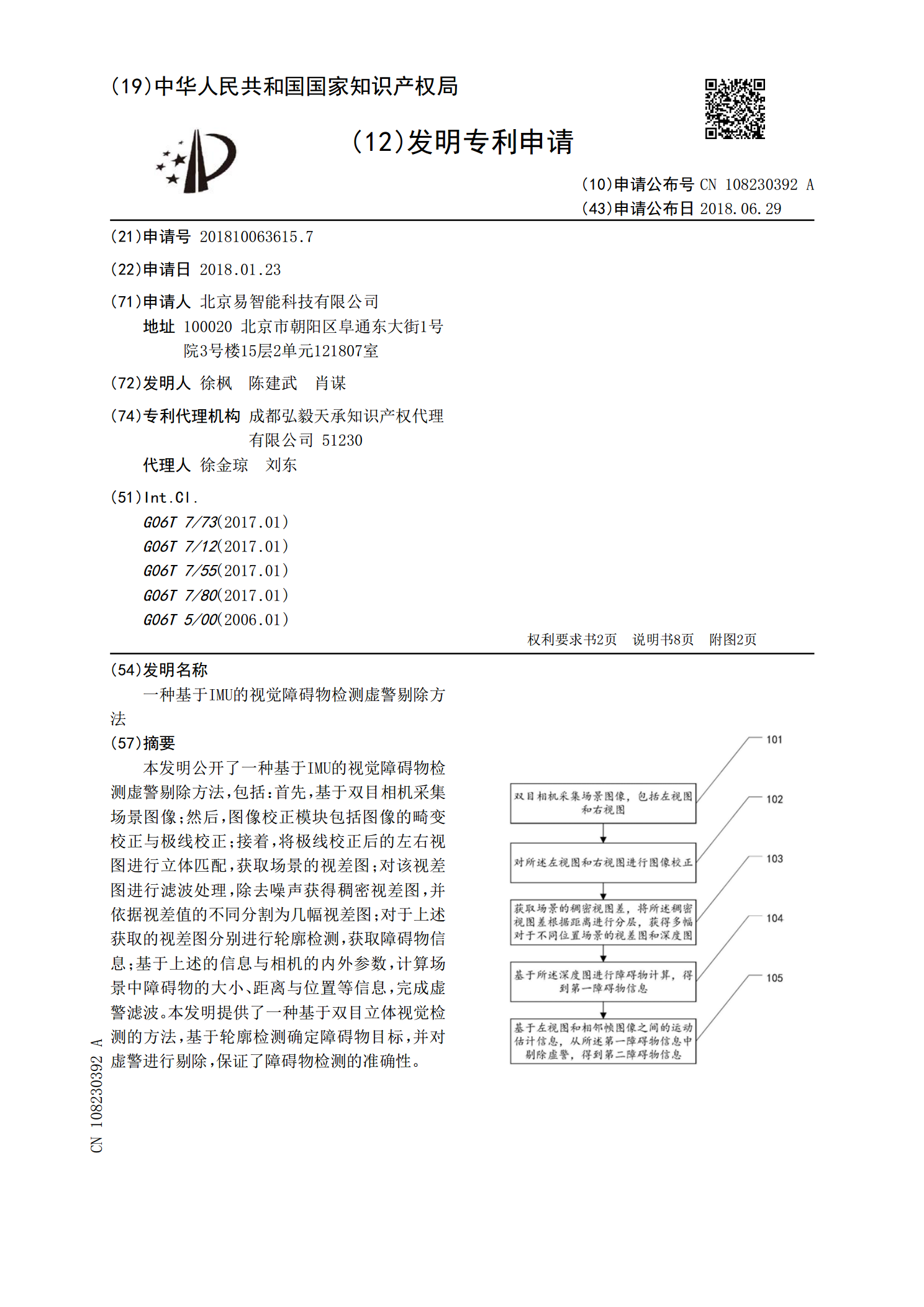
本发明公开了一种基于IMU的视觉障碍物检测虚警剔除方法,包括:首先,基于双目相机采集场景图像;然后,图像校正模块包括图像的畸变校正与极线校正;接着,将极线校正后的左右视图进行立体匹配,获取场景的视差图;对该视差图进行滤波处理,除去噪声获得稠密视差图,并依据视差值的不同分割为几幅视差图;对于上述获取的视差图分别进行轮廓检测,获取障碍物信息;基于上述的信息与相机的内外参数,计算场景中障碍物的大小、距离与位置等信息,完成虚警滤波。本发明提供了一种基于双目立体视觉检测的方法,基于轮廓检测确定障碍物目标,并对虚警进

网格化FRFT域雷达目标检测与多级联合虚警剔除方法.pdf
本发明涉及一种网格化FRFT域雷达目标检测与多级联合虚警剔除方法,属于雷达信号处理和目标检测技术领域。本发明首先解决了常规FRFT域目标检测面临的两个自变量参数搜索范围和搜索步长难以量化的问题,建立了多普勒‑加速度二维搜索网格;然后针对CFAR检测后虚警较多的问题,在距离‑多普勒‑加速度三维数据空间中,对过门限后的点迹通过二维点迹凝聚、二维检测融合以及三维点迹凝聚三个步骤实施多级联合虚警剔除。与常规FRFT域目标检测方法相比,本发明给出的FRFT域雷达目标检测及虚警剔除方法具有明确的参数搜索网格,且通过多

基于FIR多普勒滤波信息的地杂波虚警点剔除方法及系统.pdf
本发明属于雷达技术领域,具体涉及一种基于FIR多普勒滤波信息的地杂波虚警点剔除方法及系统,获取训练回波信号和测试回波信号;根据训练回波信号得到地杂波样本;根据地杂波样本和训练回波信号得到训练极大值变化率;根据极大值变化率得到最大极大值变化率,并根据最大极大值变化率得到判定门限值;根据测试回波信号得到多普勒滤波信号;根据多普勒滤波信号得到待判定目标信息;根据多普勒滤波信号进行提取操作得到待判定目标的FIR多普勒滤波信号;根据FIR多普勒滤波信号得到若干测试极大值变化率;根据判定门限值对测试极大值变化率进行比
基于多源特征迁移与虚警剔除的SAR图像目标检测方法.pdf
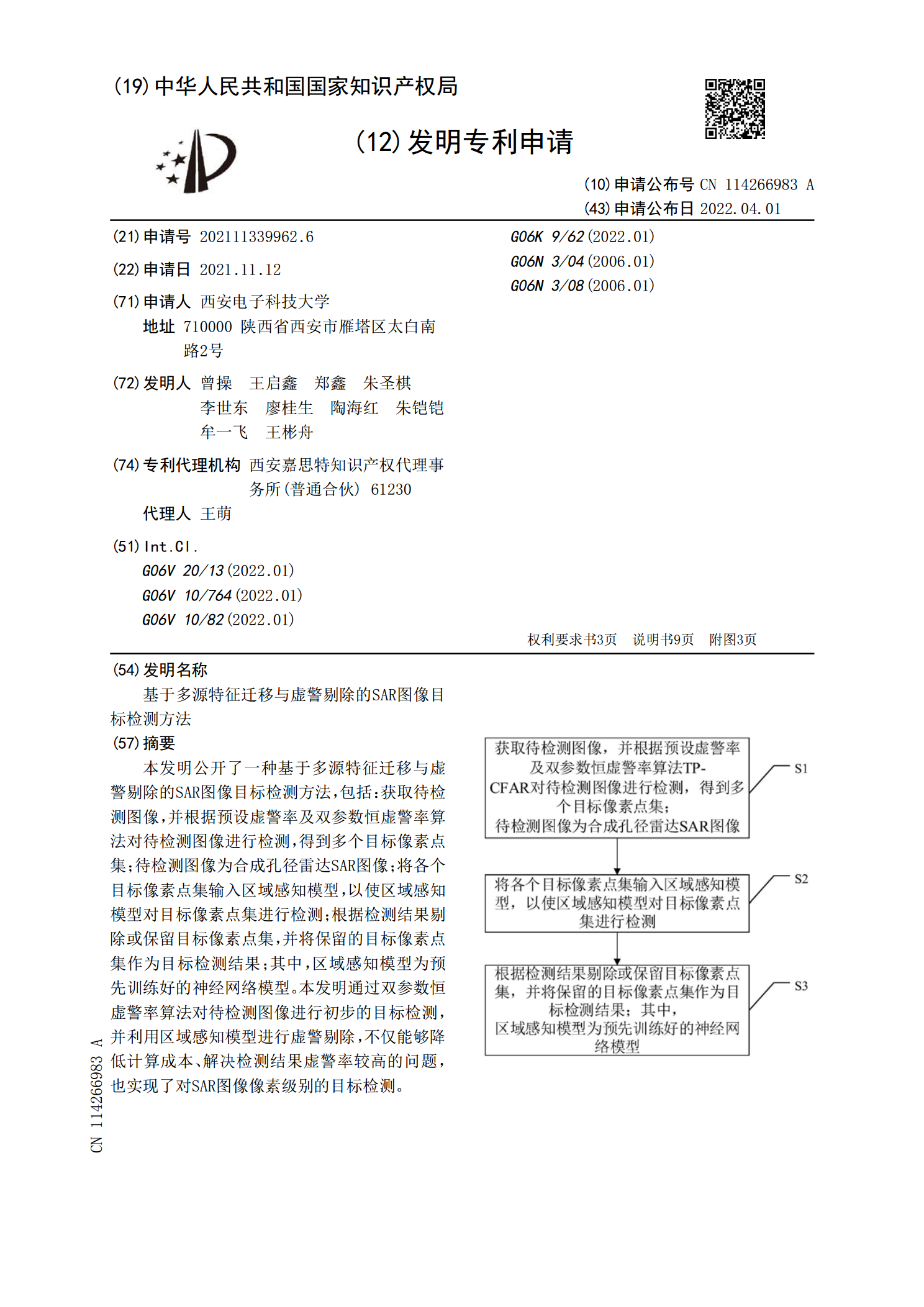
本发明公开了一种基于多源特征迁移与虚警剔除的SAR图像目标检测方法,包括:获取待检测图像,并根据预设虚警率及双参数恒虚警率算法对待检测图像进行检测,得到多个目标像素点集;待检测图像为合成孔径雷达SAR图像;将各个目标像素点集输入区域感知模型,以使区域感知模型对目标像素点集进行检测;根据检测结果剔除或保留目标像素点集,并将保留的目标像素点集作为目标检测结果;其中,区域感知模型为预先训练好的神经网络模型。本发明通过双参数恒虚警率算法对待检测图像进行初步的目标检测,并利用区域感知模型进行虚警剔除,不仅能够降低计