
一种基于IMU的视觉障碍物检测虚警剔除方法.pdf

一吃****仕龙

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于IMU的视觉障碍物检测虚警剔除方法.pdf
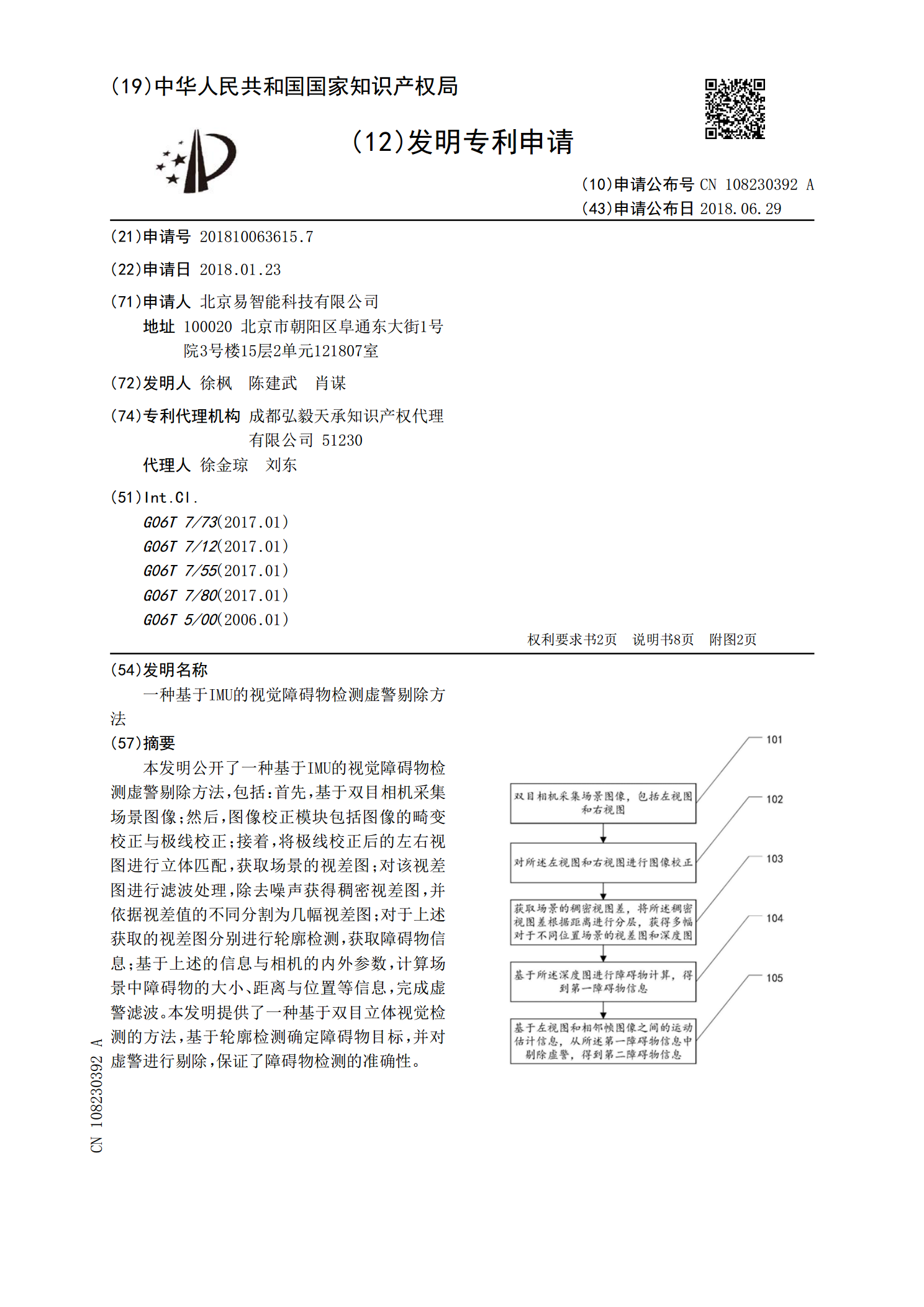
本发明公开了一种基于IMU的视觉障碍物检测虚警剔除方法,包括:首先,基于双目相机采集场景图像;然后,图像校正模块包括图像的畸变校正与极线校正;接着,将极线校正后的左右视图进行立体匹配,获取场景的视差图;对该视差图进行滤波处理,除去噪声获得稠密视差图,并依据视差值的不同分割为几幅视差图;对于上述获取的视差图分别进行轮廓检测,获取障碍物信息;基于上述的信息与相机的内外参数,计算场景中障碍物的大小、距离与位置等信息,完成虚警滤波。本发明提供了一种基于双目立体视觉检测的方法,基于轮廓检测确定障碍物目标,并对虚警进

一种基于深度学习的雷达虚警剔除方法.pdf
本发明公开了一种基于深度学习的雷达虚警剔除方法,包括如下步骤:a、将疑似目标区域周围领域划分为若干个小格;b、对每个邻域小格,分别提取其灰度类特征及纹理类特征,组成其邻域描述特征;c、从而计算出当前目标疑似区域的邻域相似性;d、对目标疑似区域进行判断,判为疑似目标的ROI保留,判断为虚警的ROI进入步骤e再次判断;e、对步骤d中判断为虚警的ROI进行点迹级虚警概率计算和航迹级虚警概率计算,能够形成航迹的即为疑似目标的ROI,不能形成航迹的即为最终虚警的ROI;g、将步骤d和步骤e中的疑似目标的ROI,用基
基于多源特征迁移与虚警剔除的SAR图像目标检测方法.pdf
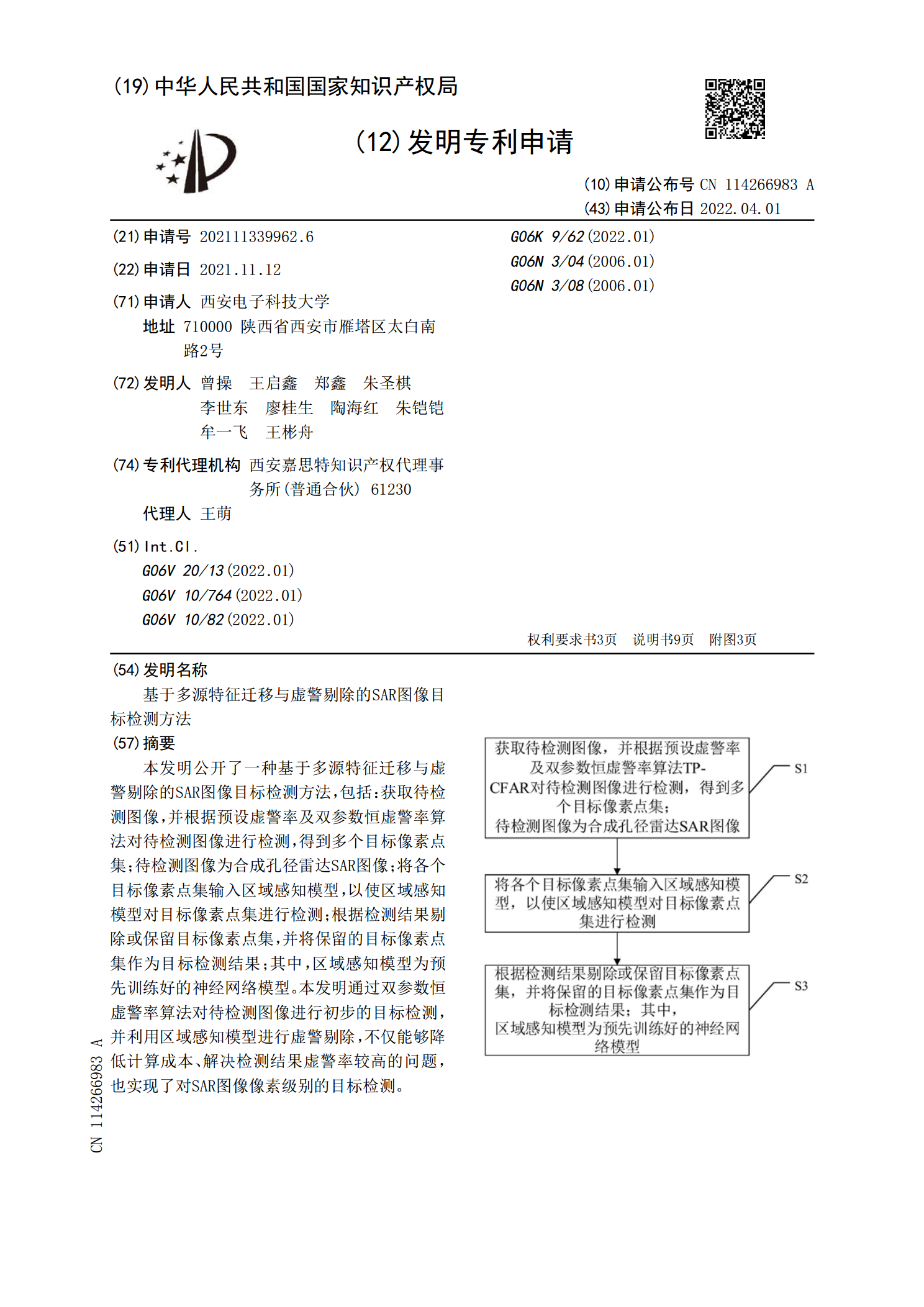
本发明公开了一种基于多源特征迁移与虚警剔除的SAR图像目标检测方法,包括:获取待检测图像,并根据预设虚警率及双参数恒虚警率算法对待检测图像进行检测,得到多个目标像素点集;待检测图像为合成孔径雷达SAR图像;将各个目标像素点集输入区域感知模型,以使区域感知模型对目标像素点集进行检测;根据检测结果剔除或保留目标像素点集,并将保留的目标像素点集作为目标检测结果;其中,区域感知模型为预先训练好的神经网络模型。本发明通过双参数恒虚警率算法对待检测图像进行初步的目标检测,并利用区域感知模型进行虚警剔除,不仅能够降低计

基于FIR多普勒滤波信息的地杂波虚警点剔除方法及系统.pdf
本发明属于雷达技术领域,具体涉及一种基于FIR多普勒滤波信息的地杂波虚警点剔除方法及系统,获取训练回波信号和测试回波信号;根据训练回波信号得到地杂波样本;根据地杂波样本和训练回波信号得到训练极大值变化率;根据极大值变化率得到最大极大值变化率,并根据最大极大值变化率得到判定门限值;根据测试回波信号得到多普勒滤波信号;根据多普勒滤波信号得到待判定目标信息;根据多普勒滤波信号进行提取操作得到待判定目标的FIR多普勒滤波信号;根据FIR多普勒滤波信号得到若干测试极大值变化率;根据判定门限值对测试极大值变化率进行比
一种基于视觉特性的盲元剔除方法.pdf
本发明公开了一种基于视觉特性的盲元剔除方法,方法包括:基于视觉特性的盲元初检测,盲元精确检测和盲元补偿。所述基于视觉的盲元初检测为根据人眼视觉特性对邻域中心灰度值高于邻域非中心像素值的最大值D或低于邻域最小值D的标记盲元点;所述盲元精确检测模块,对多场景视觉初定位结果累加,并分三个等级:1类盲元、2类盲元、3类盲元,且不断更新;所述盲元补偿模块采用改进的中值滤波方法补偿,剔除盲元。本发明所用方法简单,对硬件要求低,同时,较好的解决了传统盲元剔除方法细节丢失、误判点目标、随机盲元和老化引起新盲元问题。