
一种智能型水面机器人.pdf

贤惠****66


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种智能型水面机器人.pdf
本发明公开了一种智能型水面机器人,包括船体(1),其特征在于:所述船体(1)的一侧开设有收集槽(2),所述的收集槽(2)内设有搜集装置(3),所述的搜集装置(3)包括设置在收集槽(2)内的转轴(3.1),所述的转轴(3.1)上套设有滚筒(3.2),所述滚筒(3.2)的外围设有若干个均匀分布的搜集桨(3.3),所述收集槽(2)的一侧设有与搜集桨(3.3)配合的弧形预留板(4),所述的船体(1)内靠近弧形预留板(4)的一侧设有储存槽(5),所述的储存槽(5)内设有过滤板(6),所述的过滤板(6)下设有集水斗(
一种水面捕捞机器人.pdf
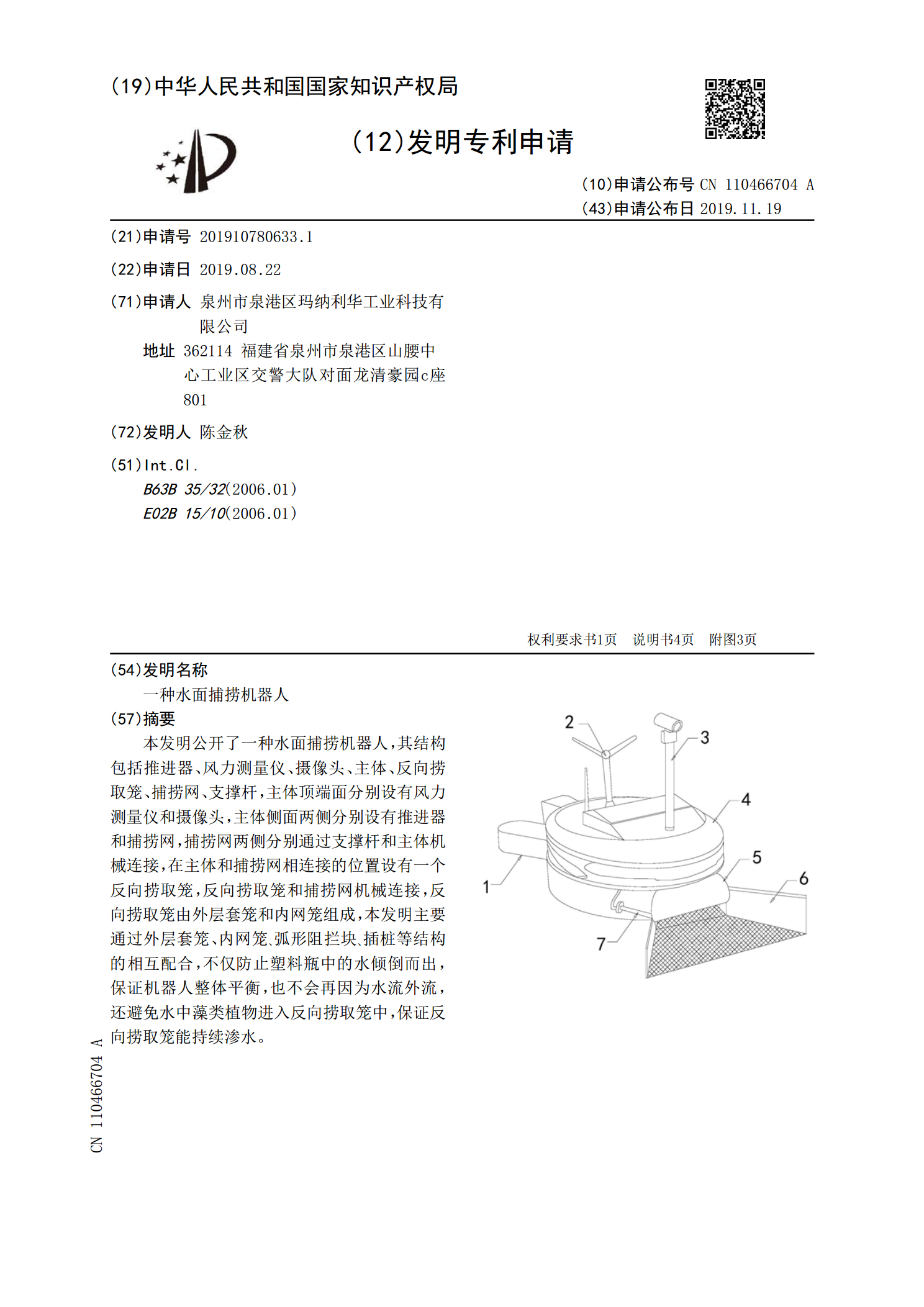
本发明公开了一种水面捕捞机器人,其结构包括推进器、风力测量仪、摄像头、主体、反向捞取笼、捕捞网、支撑杆,主体顶端面分别设有风力测量仪和摄像头,主体侧面两侧分别设有推进器和捕捞网,捕捞网两侧分别通过支撑杆和主体机械连接,在主体和捕捞网相连接的位置设有一个反向捞取笼,反向捞取笼和捕捞网机械连接,反向捞取笼由外层套笼和内网笼组成,本发明主要通过外层套笼、内网笼

一种水面捕捞机器人.pdf
本发明公开了一种水面清理设备,特别是一种水面捕捞机器人,其结构中第一测距传感器监测水面捕捞机器人前进方向上的离岸距离,而第二测距传感器则监测左右方向上的离岸距离;第一电机驱动一对毛刷轮沿不同方向旋转,通过控制一对电磁离合器能够实现任意一个毛刷轮单独旋转;第二电机驱动水面捕捞机器人前后运行;控制器根据第一测距传感器以及第二测距传感器的电信号,判断及确定水面捕捞机器人的前进方向上以及左右方向上的各自离岸距离,切换第一电机、第二电机以及电磁离合器的工作状态,能够自动调整水面捕捞机器人的运行状态及路径。其解决了“
一种智能型机器人.pdf
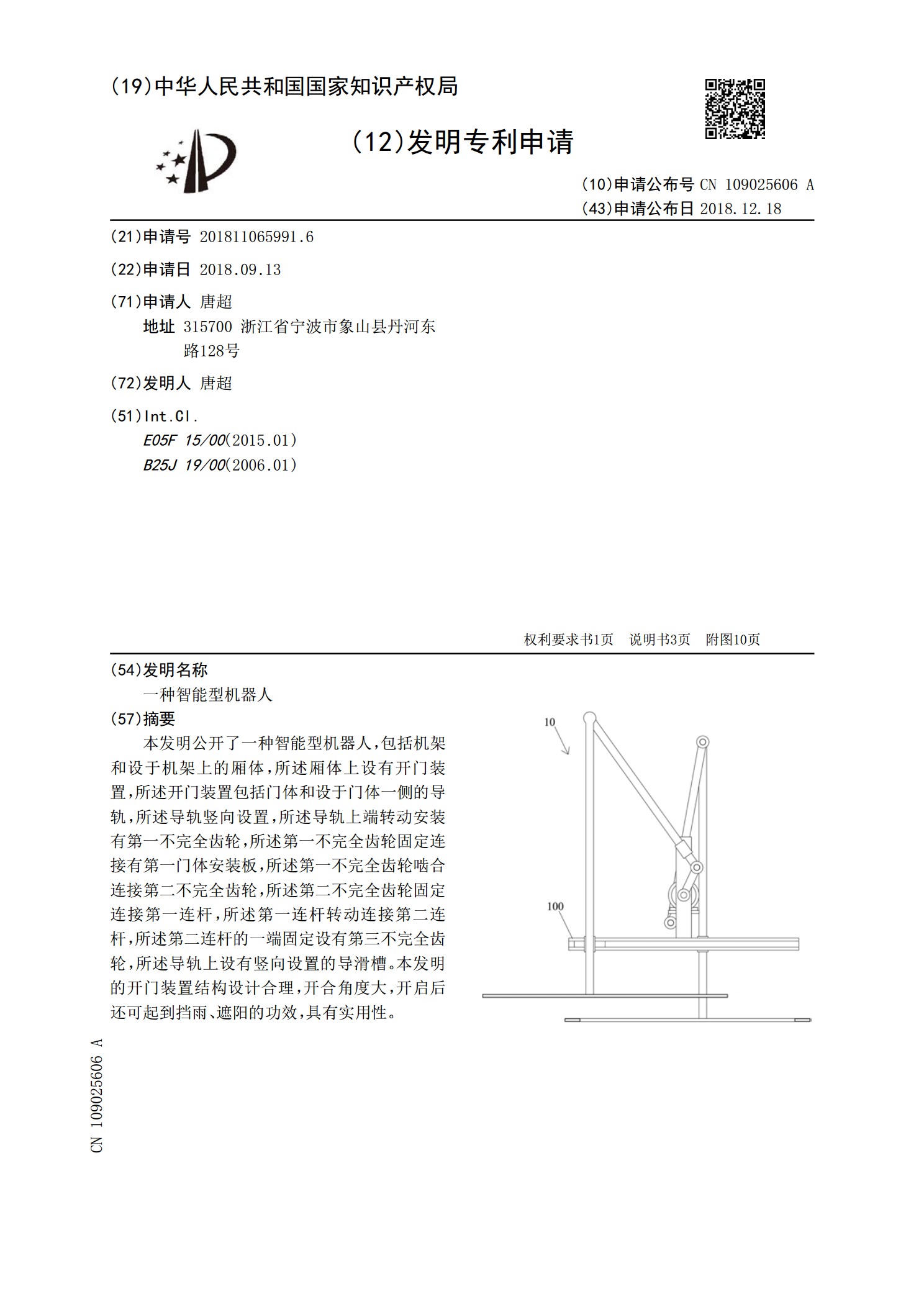
本发明公开了一种智能型机器人,包括机架和设于机架上的厢体,所述厢体上设有开门装置,所述开门装置包括门体和设于门体一侧的导轨,所述导轨竖向设置,所述导轨上端转动安装有第一不完全齿轮,所述第一不完全齿轮固定连接有第一门体安装板,所述第一不完全齿轮啮合连接第二不完全齿轮,所述第二不完全齿轮固定连接第一连杆,所述第一连杆转动连接第二连杆,所述第二连杆的一端固定设有第三不完全齿轮,所述导轨上设有竖向设置的导滑槽。本发明的开门装置结构设计合理,开合角度大,开启后还可起到挡雨、遮阳的功效,具有实用性。
一种水面垃圾收集机器人.pdf
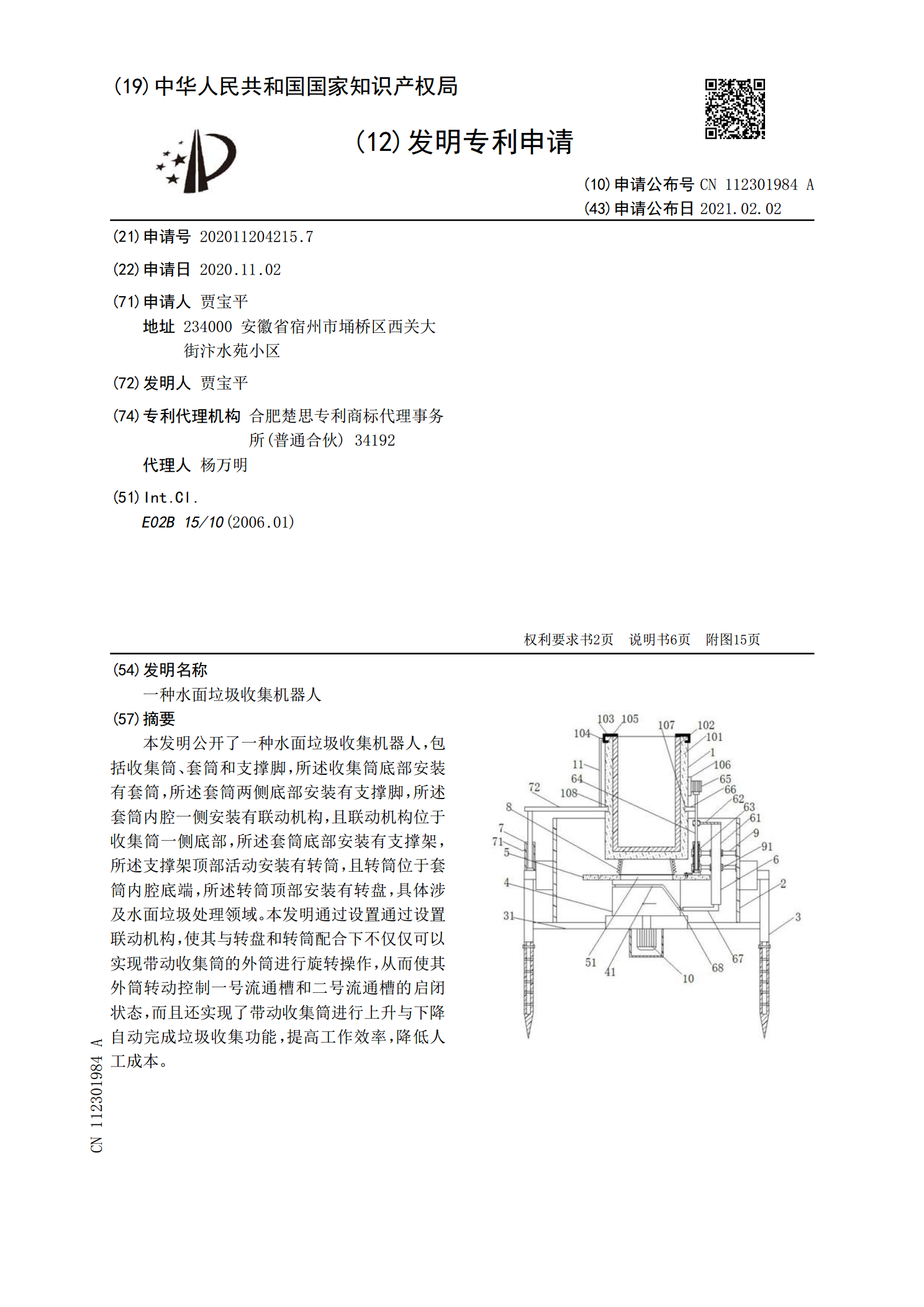
本发明公开了一种水面垃圾收集机器人,包括收集筒、套筒和支撑脚,所述收集筒底部安装有套筒,所述套筒两侧底部安装有支撑脚,所述套筒内腔一侧安装有联动机构,且联动机构位于收集筒一侧底部,所述套筒底部安装有支撑架,所述支撑架顶部活动安装有转筒,且转筒位于套筒内腔底端,所述转筒顶部安装有转盘,具体涉及水面垃圾处理领域。本发明通过设置通过设置联动机构,使其与转盘和转筒配合下不仅仅可以实现带动收集筒的外筒进行旋转操作,从而使其外筒转动控制一号流通槽和二号流通槽的启闭状态,而且还实现了带动收集筒进行上升与下降自动完成垃圾