
一种基于TOF相机数据的平面拟合方法.pdf

玉怡****文档


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于TOF相机数据的平面拟合方法.pdf
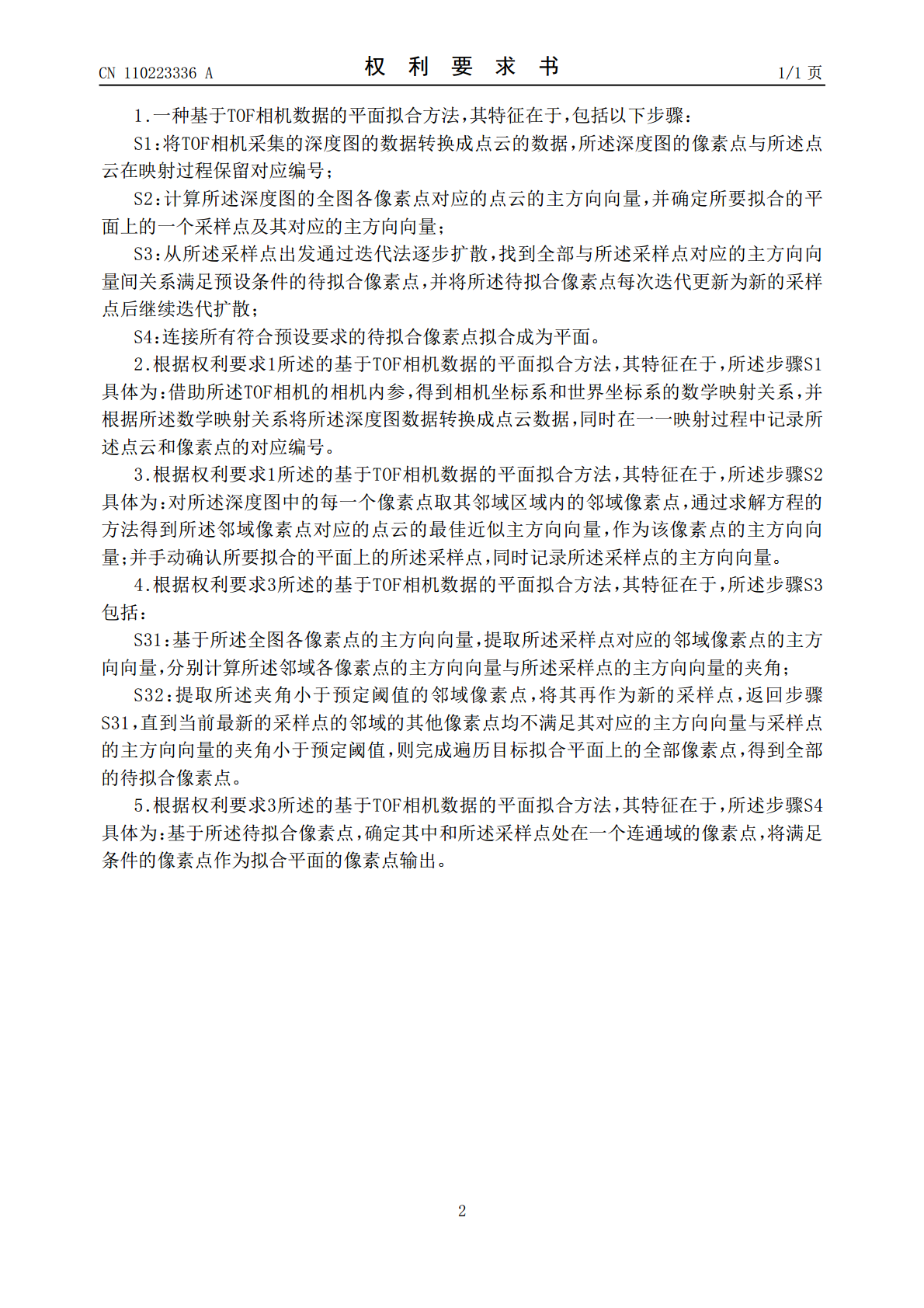
本发明提供了一种基于TOF相机数据的平面拟合方法,包括以下步骤:S1:将TOF相机采集的深度图的数据转换成点云的数据,所述深度图的像素点与所述点云在映射过程保留对应编号;S2:计算所述深度图的全图各像素点对应的点云的主方向向量,并确定所要拟合的平面上的一个采样点及其对应的主方向向量;S3:从所述采样点出发通过迭代法逐步扩散,找到全部与所述采样点对应的主方向向量间关系满足预设条件的待拟合像素点,并将所述待拟合像素点每次迭代更新为新的采样点后继续迭代扩散;S4:连接所有符合预设要求的待拟合像素点拟合成为平面。
一种基于TOF相机的车位检测方法.pdf
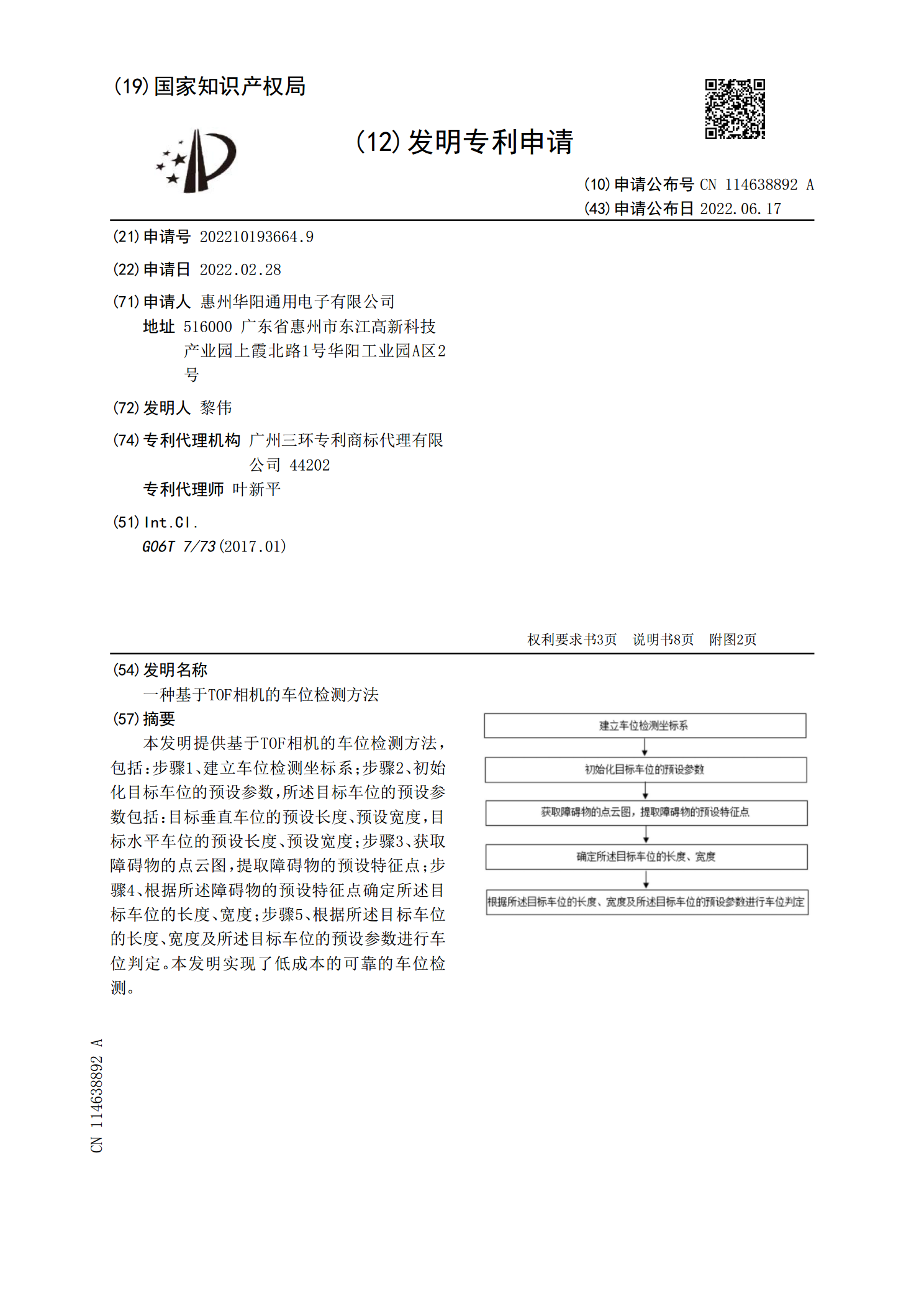
本发明提供基于TOF相机的车位检测方法,包括:步骤1、建立车位检测坐标系;步骤2、初始化目标车位的预设参数,所述目标车位的预设参数包括:目标垂直车位的预设长度、预设宽度,目标水平车位的预设长度、预设宽度;步骤3、获取障碍物的点云图,提取障碍物的预设特征点;步骤4、根据所述障碍物的预设特征点确定所述目标车位的长度、宽度;步骤5、根据所述目标车位的长度、宽度及所述目标车位的预设参数进行车位判定。本发明实现了低成本的可靠的车位检测。
一种基于TOF相机的煤流量实时动态计量方法.pdf
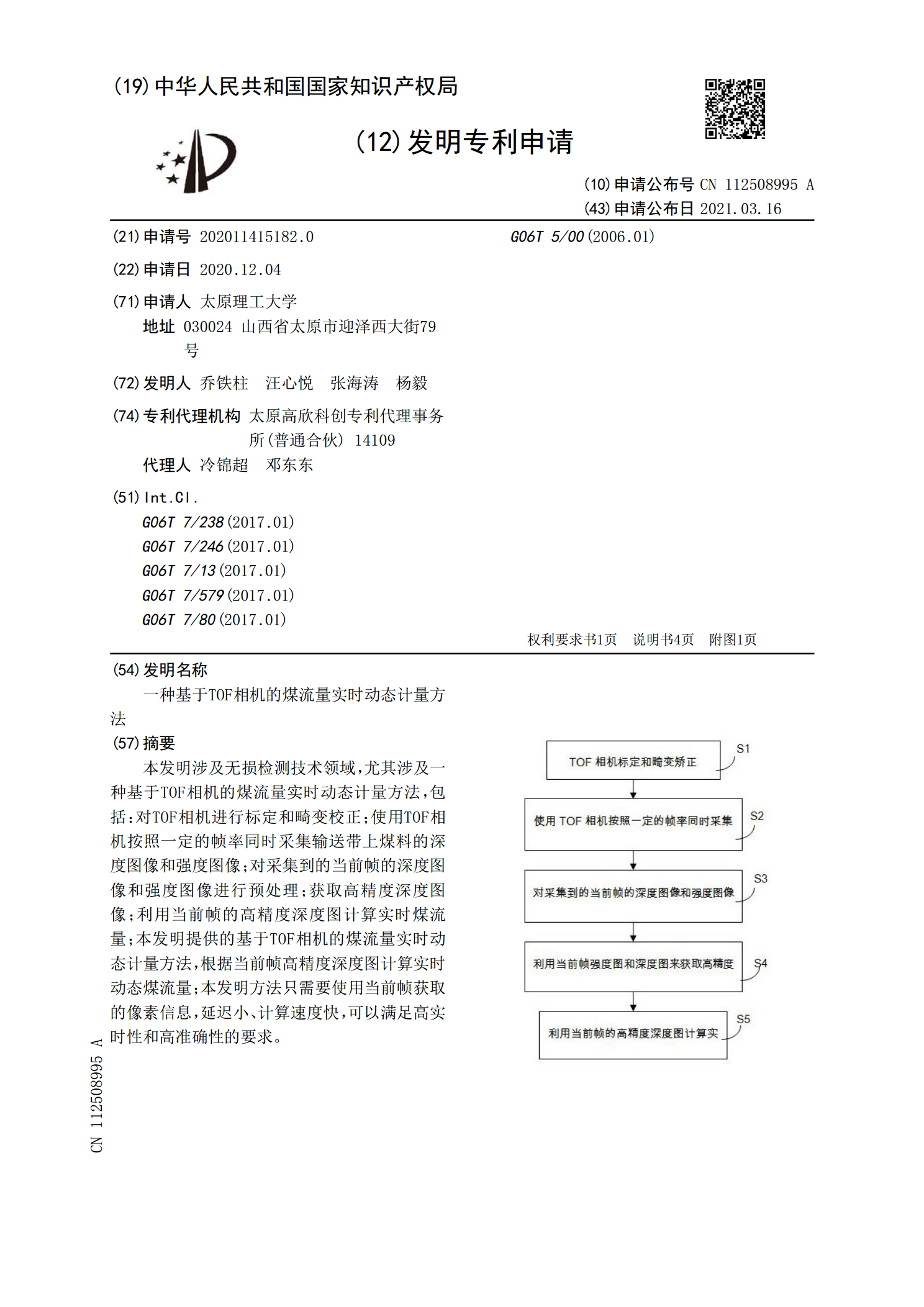
本发明涉及无损检测技术领域,尤其涉及一种基于TOF相机的煤流量实时动态计量方法,包括:对TOF相机进行标定和畸变校正;使用TOF相机按照一定的帧率同时采集输送带上煤料的深度图像和强度图像;对采集到的当前帧的深度图像和强度图像进行预处理;获取高精度深度图像;利用当前帧的高精度深度图计算实时煤流量;本发明提供的基于TOF相机的煤流量实时动态计量方法,根据当前帧高精度深度图计算实时动态煤流量;本发明方法只需要使用当前帧获取的像素信息,延迟小、计算速度快,可以满足高实时性和高准确性的要求。

基于TOF相机的车流量及车型检测方法.pdf
本发明公开了一种基于TOF相机的车流量及车型检测方法,利用TOF相机获取的被测路面的视频图像设置矩形虚拟检测区域,当车辆经过虚拟检测区域时,根据TOF相机提供的距离信息,虚拟检测区域内的距离算术平均值会发生改变,本方法利用距离变化的特点对车流量进行检测;同时利用TOF相机提供的距离信息可以得到车辆的高度,通过判断车辆高度的轮廓线,实现车型的检测。
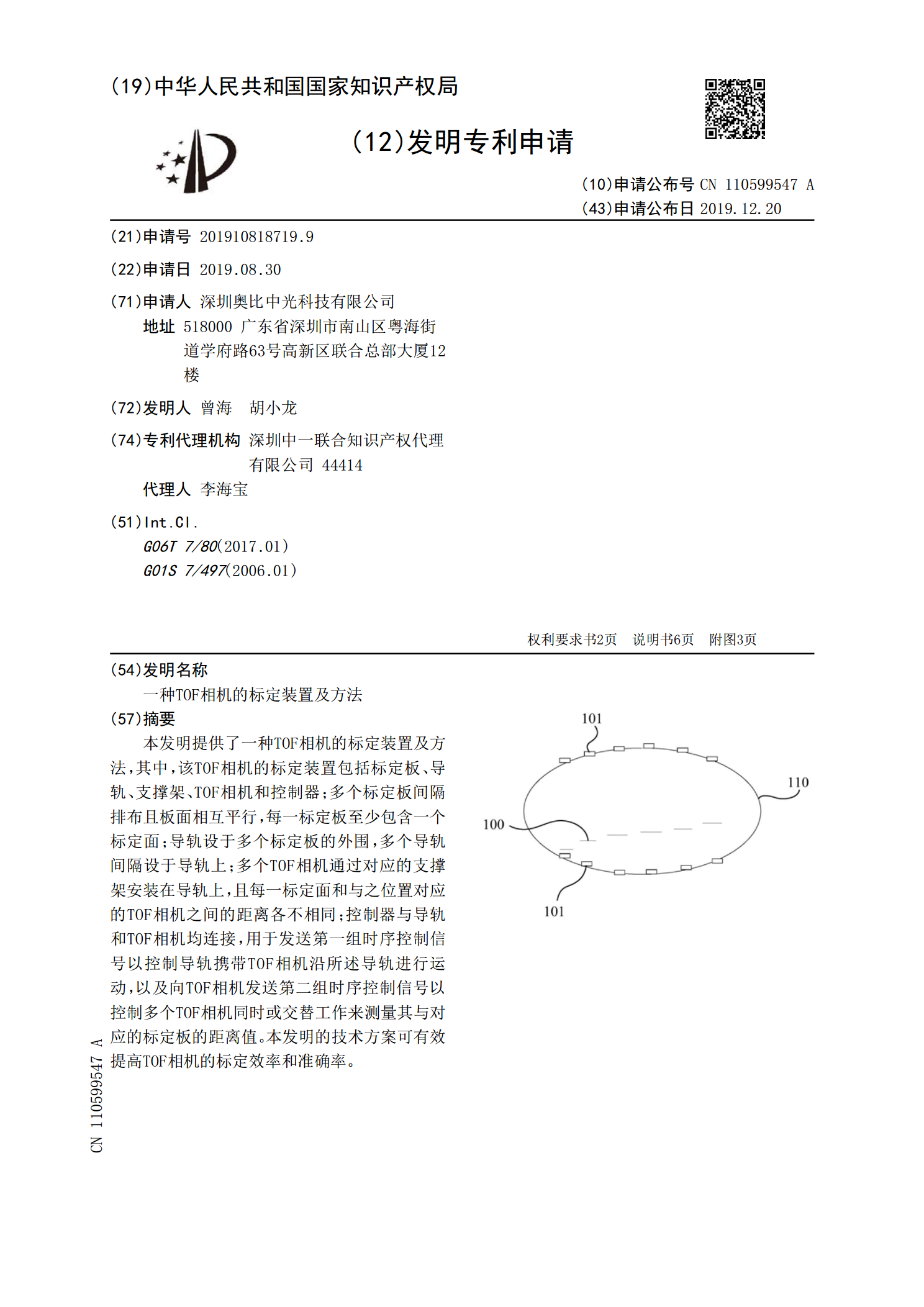
一种TOF相机的标定装置及方法.pdf
本发明提供了一种TOF相机的标定装置及方法,其中,该TOF相机的标定装置包括标定板、导轨、支撑架、TOF相机和控制器;多个标定板间隔排布且板面相互平行,每一标定板至少包含一个标定面;导轨设于多个标定板的外围,多个导轨间隔设于导轨上;多个TOF相机通过对应的支撑架安装在导轨上,且每一标定面和与之位置对应的TOF相机之间的距离各不相同;控制器与导轨和TOF相机均连接,用于发送第一组时序控制信号以控制导轨携带TOF相机沿所述导轨进行运动,以及向TOF相机发送第二组时序控制信号以控制多个TOF相机同时或交替工作来