
一种用于无人艇平台的基于机械臂辅助和平行四连杆机构的多无人机降落装置.pdf

念珊****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于无人艇平台的基于机械臂辅助和平行四连杆机构的多无人机降落装置.pdf
本发明属于无人机辅助设备技术领域,具体公开了一种用于无人艇平台的基于机械臂辅助和平行四连杆机构的多无人机降落装置,包括无人艇,无人艇上设有多层旋转平台,多层旋转平台上的任一层平台上均设有无人机固定装置,无人机固定装置上设有无人机,无人艇上还设有与多层旋转平台相配合的舰载机械臂系统,无人艇上设有控制系统。通过无人艇上的多层旋转平台,可以起降多架无人机,无人机固定装置可以稳定的固定停留在多层旋转平台上的无人机,而且能够在无人机电量不足的情况下对无人机进行充电,无人机和无人机固定装置配合,起到无人机快速平稳地在

一种用于无人艇平台的多无人机降落系统.pdf
一种用于无人艇平台的多无人机降落系统,设置在无人艇平台上,包括舰载机械臂系统、多层旋转平台和无人机固定装置,其中,舰载机械臂系统安装在无人艇的中部,多层旋转平台设置在无人艇甲板上,无人机固定装置均匀设置在多层旋转平台上,所述舰载机械臂系统包括工业六自由度机械臂,其工作端安装有末端钳夹式执行器,用于夹持无人机的起落架;所述多层旋转平台包括平台支撑杆,平台支撑杆上设置有至少一层安装板,安装板上均匀设置有无人机固定装置。本发明结构新颖,构思巧妙,为无人艇与多个无人机的配合提供了基础,极大提高了无人艇平台上无人机
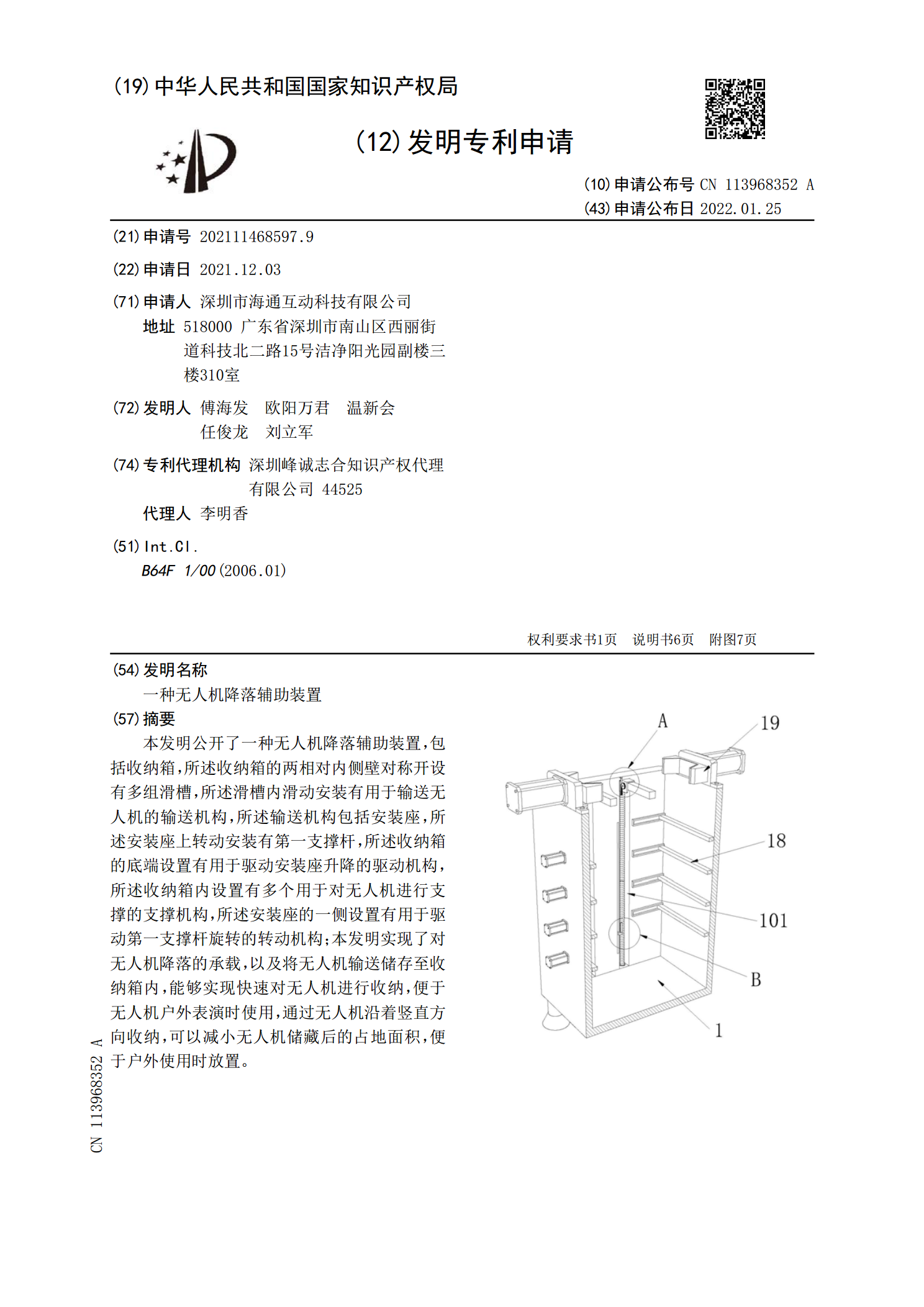
一种无人机降落辅助装置.pdf
本发明公开了一种无人机降落辅助装置,包括收纳箱,所述收纳箱的两相对内侧壁对称开设有多组滑槽,所述滑槽内滑动安装有用于输送无人机的输送机构,所述输送机构包括安装座,所述安装座上转动安装有第一支撑杆,所述收纳箱的底端设置有用于驱动安装座升降的驱动机构,所述收纳箱内设置有多个用于对无人机进行支撑的支撑机构,所述安装座的一侧设置有用于驱动第一支撑杆旋转的转动机构;本发明实现了对无人机降落的承载,以及将无人机输送储存至收纳箱内,能够实现快速对无人机进行收纳,便于无人机户外表演时使用,通过无人机沿着竖直方向收纳,可以
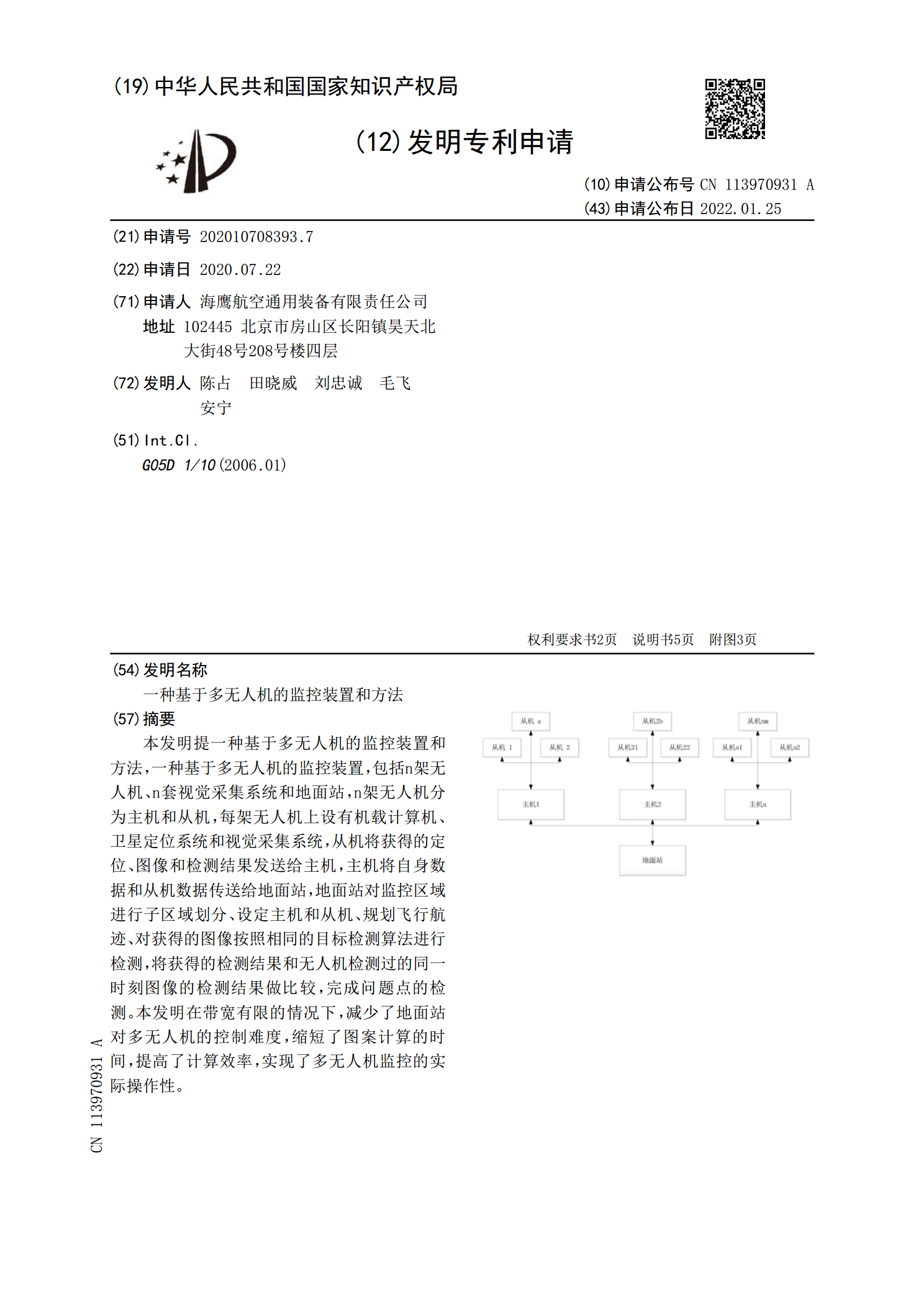
一种基于多无人机的监控装置和方法.pdf
本发明提一种基于多无人机的监控装置和方法,一种基于多无人机的监控装置,包括n架无人机、n套视觉采集系统和地面站,n架无人机分为主机和从机,每架无人机上设有机载计算机、卫星定位系统和视觉采集系统,从机将获得的定位、图像和检测结果发送给主机,主机将自身数据和从机数据传送给地面站,地面站对监控区域进行子区域划分、设定主机和从机、规划飞行航迹、对获得的图像按照相同的目标检测算法进行检测,将获得的检测结果和无人机检测过的同一时刻图像的检测结果做比较,完成问题点的检测。本发明在带宽有限的情况下,减少了地面站对多无人机

一种用于无人艇上无人机降落的缓冲固定机构.pdf
本发明公开了一种用于无人艇上无人机降落的缓冲固定机构,无人机底部设有缓冲支撑架,包括嵌于无人艇的停机箱、两片置于停机箱上侧两边的弹性固定片;所述缓冲支撑架卡接在两片弹性固定片之间,用以实现无人机降落无人艇的锁定和缓冲;所述弹性固定片一端与停机箱滑动连接,另一端相互挤压成“人”型;所述弹性固定片与停机箱连接一端到另一端由宽向窄过渡。解决了作业无人机无法准确平稳降落以及无人艇颠簸引起的无人机倾覆、落入水中等复杂水上环境所引起的一系列问题。