
一种基于多无人机的监控装置和方法.pdf

羽沫****魔王

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多无人机的监控装置和方法.pdf
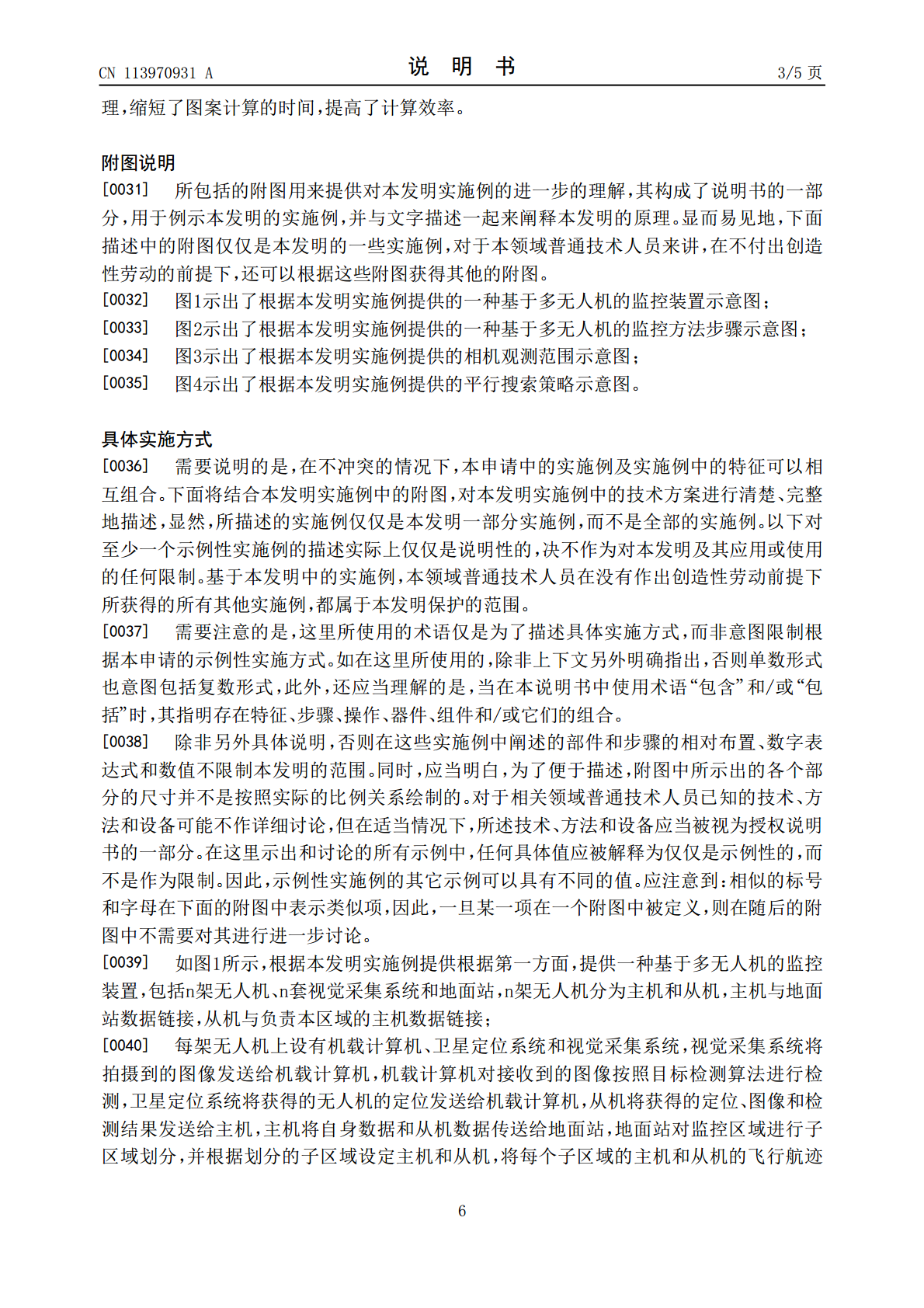
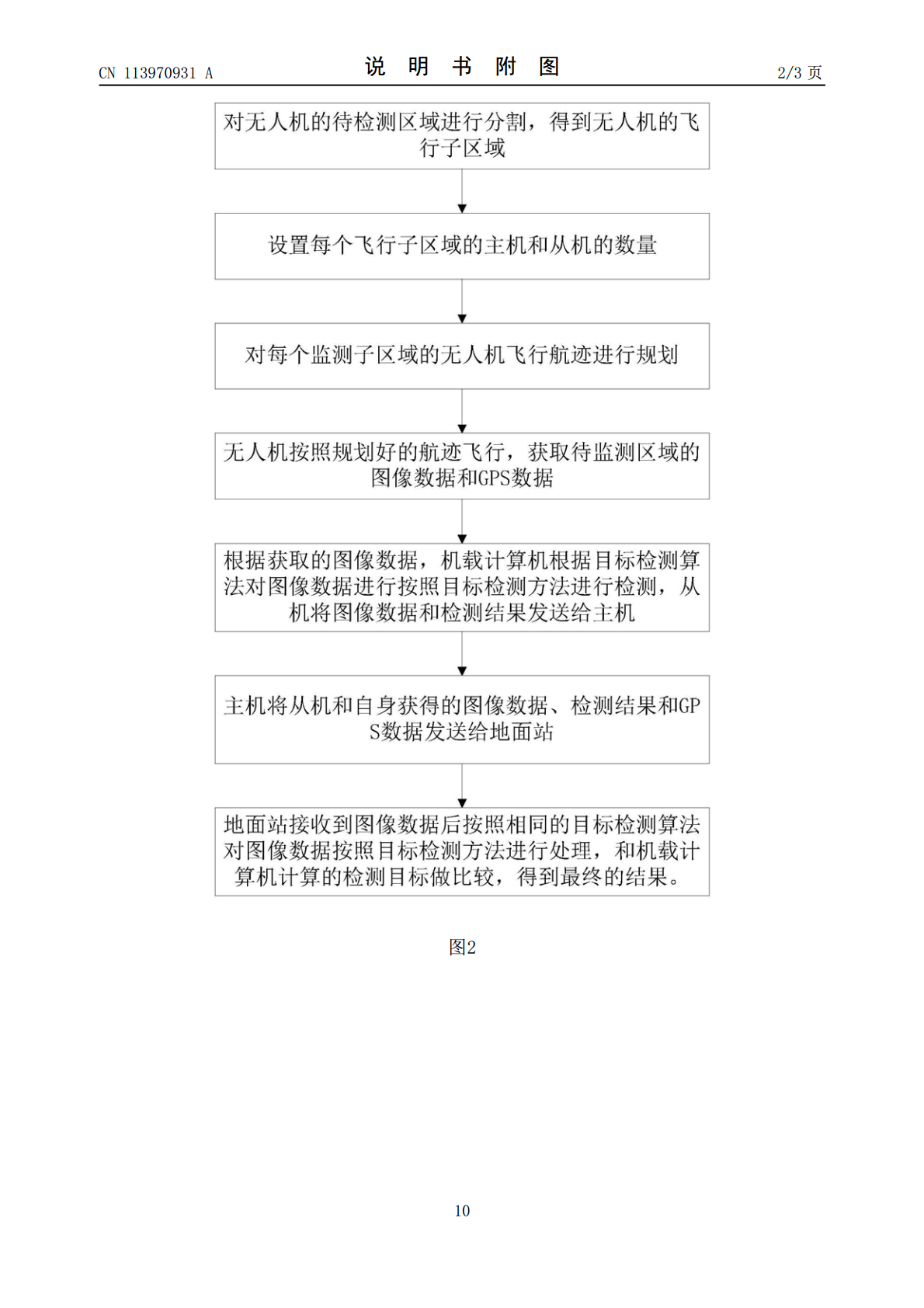
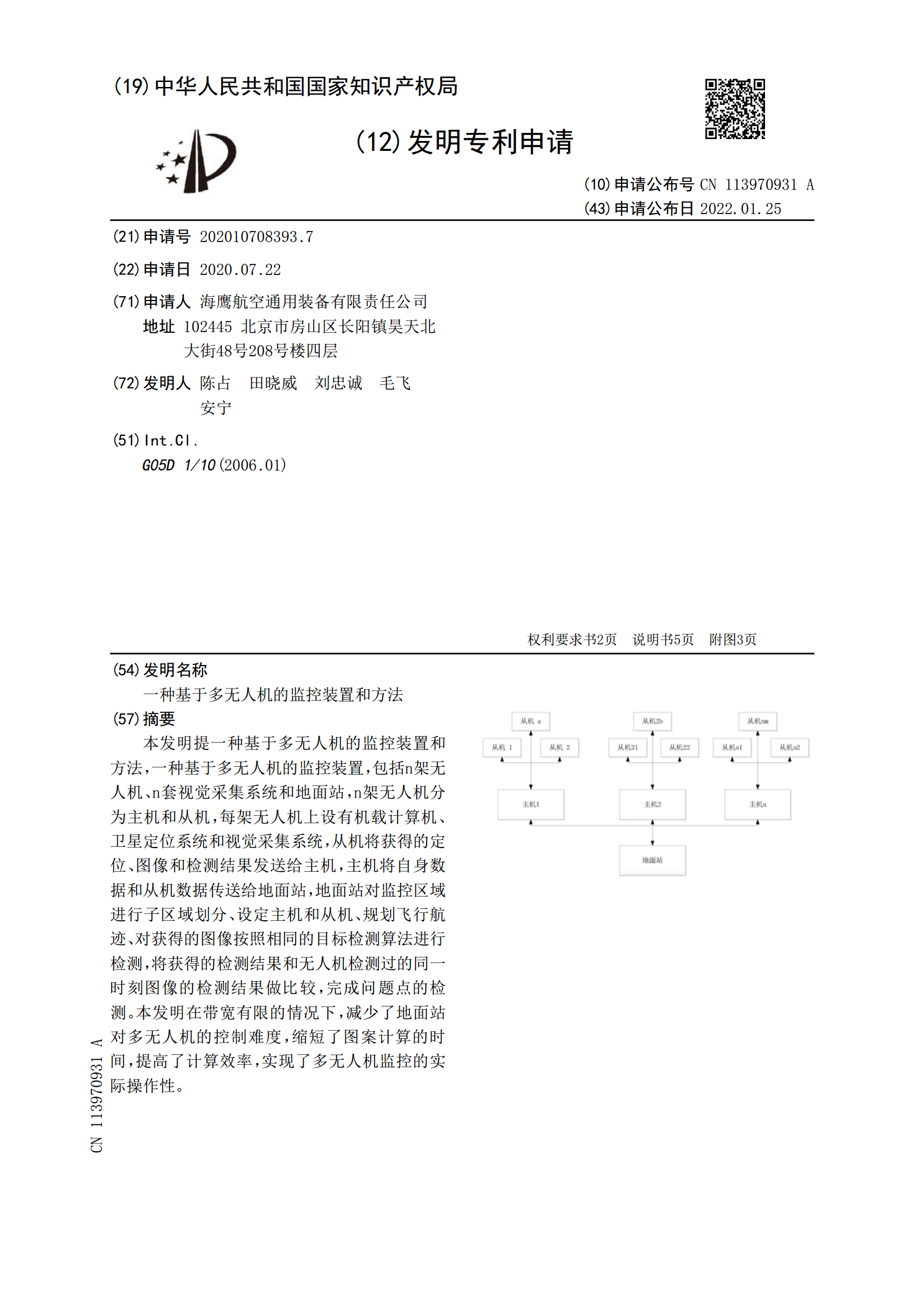
本发明提一种基于多无人机的监控装置和方法,一种基于多无人机的监控装置,包括n架无人机、n套视觉采集系统和地面站,n架无人机分为主机和从机,每架无人机上设有机载计算机、卫星定位系统和视觉采集系统,从机将获得的定位、图像和检测结果发送给主机,主机将自身数据和从机数据传送给地面站,地面站对监控区域进行子区域划分、设定主机和从机、规划飞行航迹、对获得的图像按照相同的目标检测算法进行检测,将获得的检测结果和无人机检测过的同一时刻图像的检测结果做比较,完成问题点的检测。本发明在带宽有限的情况下,减少了地面站对多无人机
多无人机协同控制方法和装置.pdf
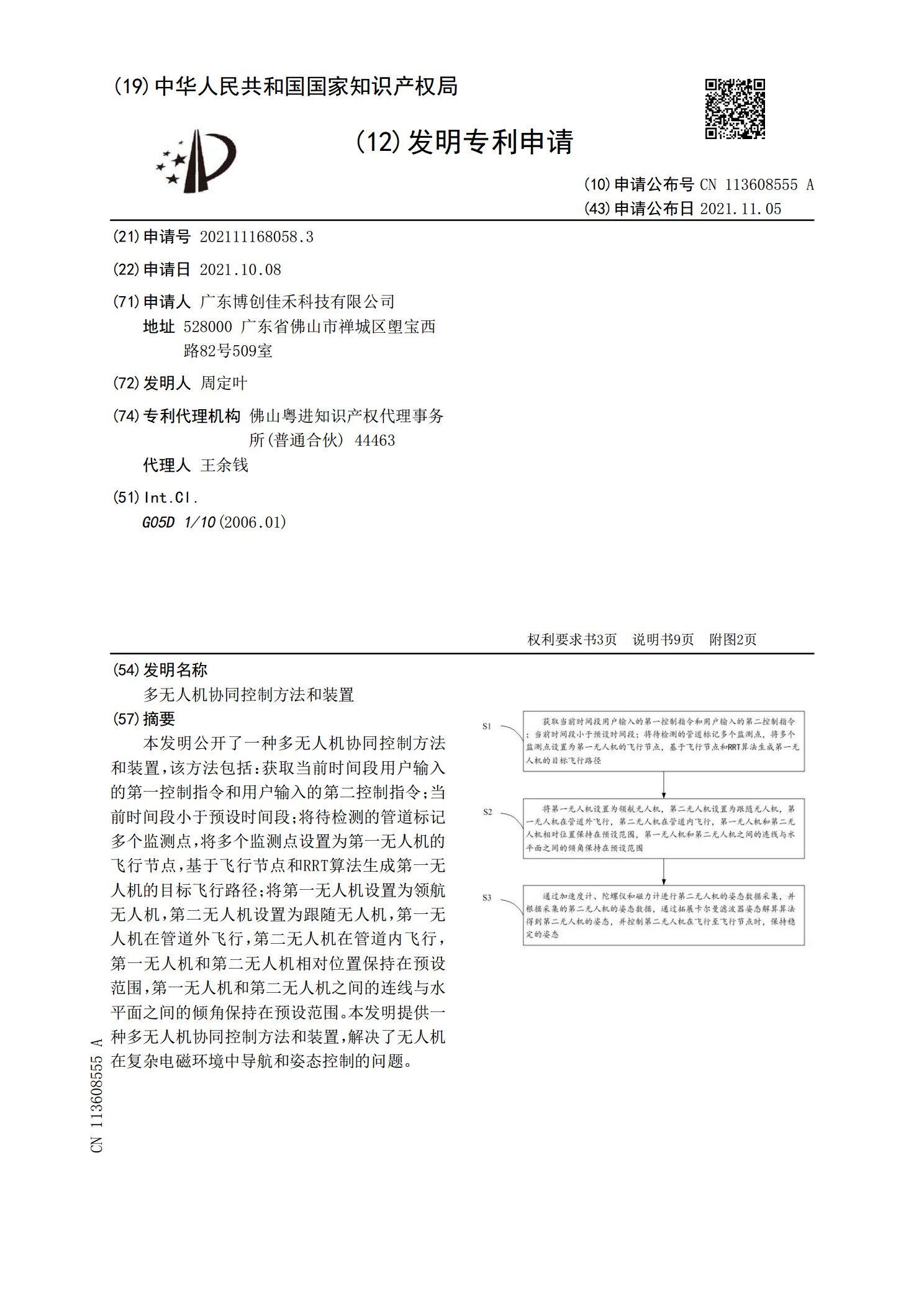
本发明公开了一种多无人机协同控制方法和装置,该方法包括:获取当前时间段用户输入的第一控制指令和用户输入的第二控制指令;当前时间段小于预设时间段;将待检测的管道标记多个监测点,将多个监测点设置为第一无人机的飞行节点,基于飞行节点和RRT算法生成第一无人机的目标飞行路径;将第一无人机设置为领航无人机,第二无人机设置为跟随无人机,第一无人机在管道外飞行,第二无人机在管道内飞行,第一无人机和第二无人机相对位置保持在预设范围,第一无人机和第二无人机之间的连线与水平面之间的倾角保持在预设范围。本发明提供一种多无人机协
一种基于图论的多无人机协同控制方法.pdf
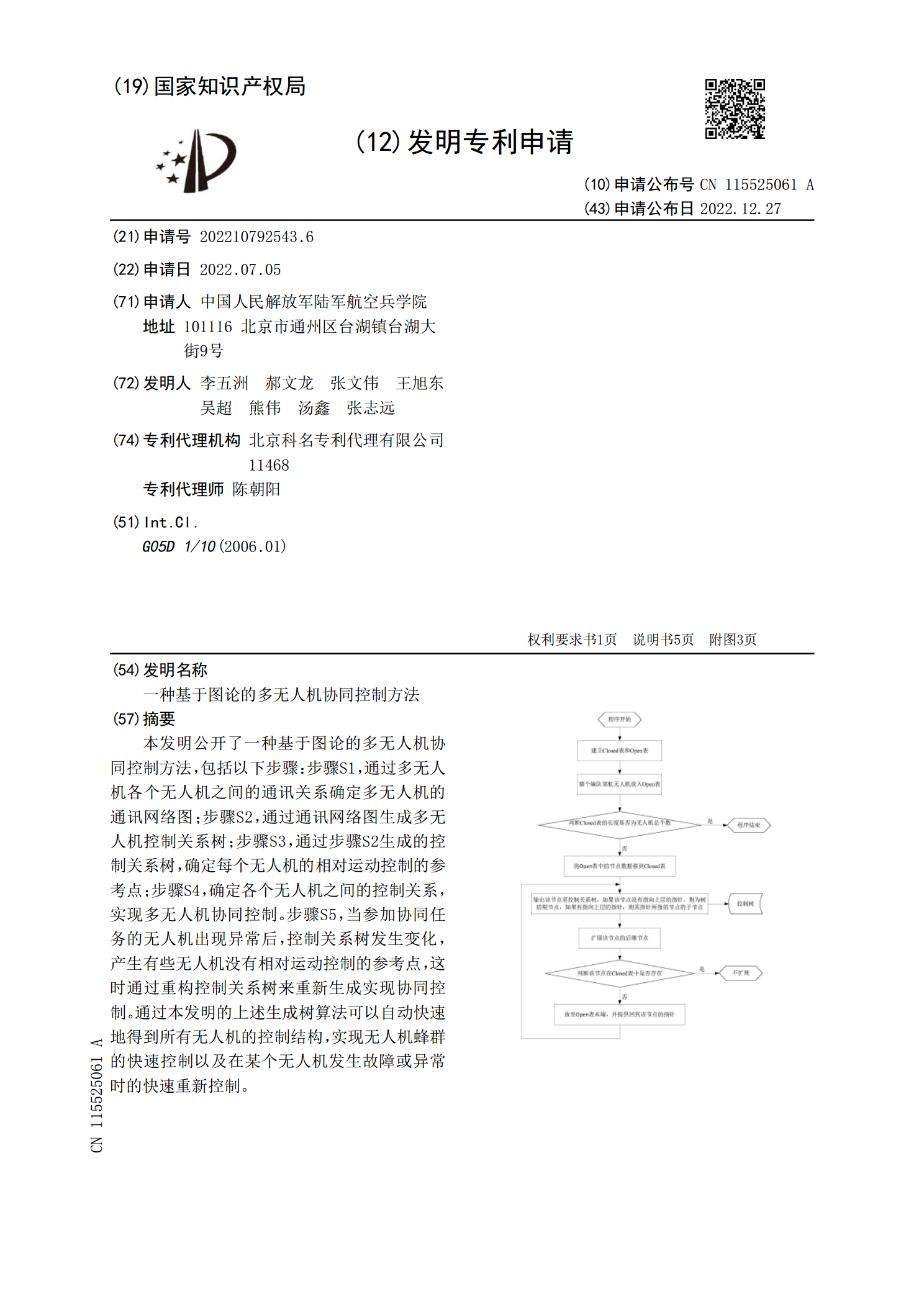
本发明公开了一种基于图论的多无人机协同控制方法,包括以下步骤:步骤S1,通过多无人机各个无人机之间的通讯关系确定多无人机的通讯网络图;步骤S2,通过通讯网络图生成多无人机控制关系树;步骤S3,通过步骤S2生成的控制关系树,确定每个无人机的相对运动控制的参考点;步骤S4,确定各个无人机之间的控制关系,实现多无人机协同控制。步骤S5,当参加协同任务的无人机出现异常后,控制关系树发生变化,产生有些无人机没有相对运动控制的参考点,这时通过重构控制关系树来重新生成实现协同控制。通过本发明的上述生成树算法可以自动快速
一种多无人机局部动态避障方法、装置和存储介质.pdf
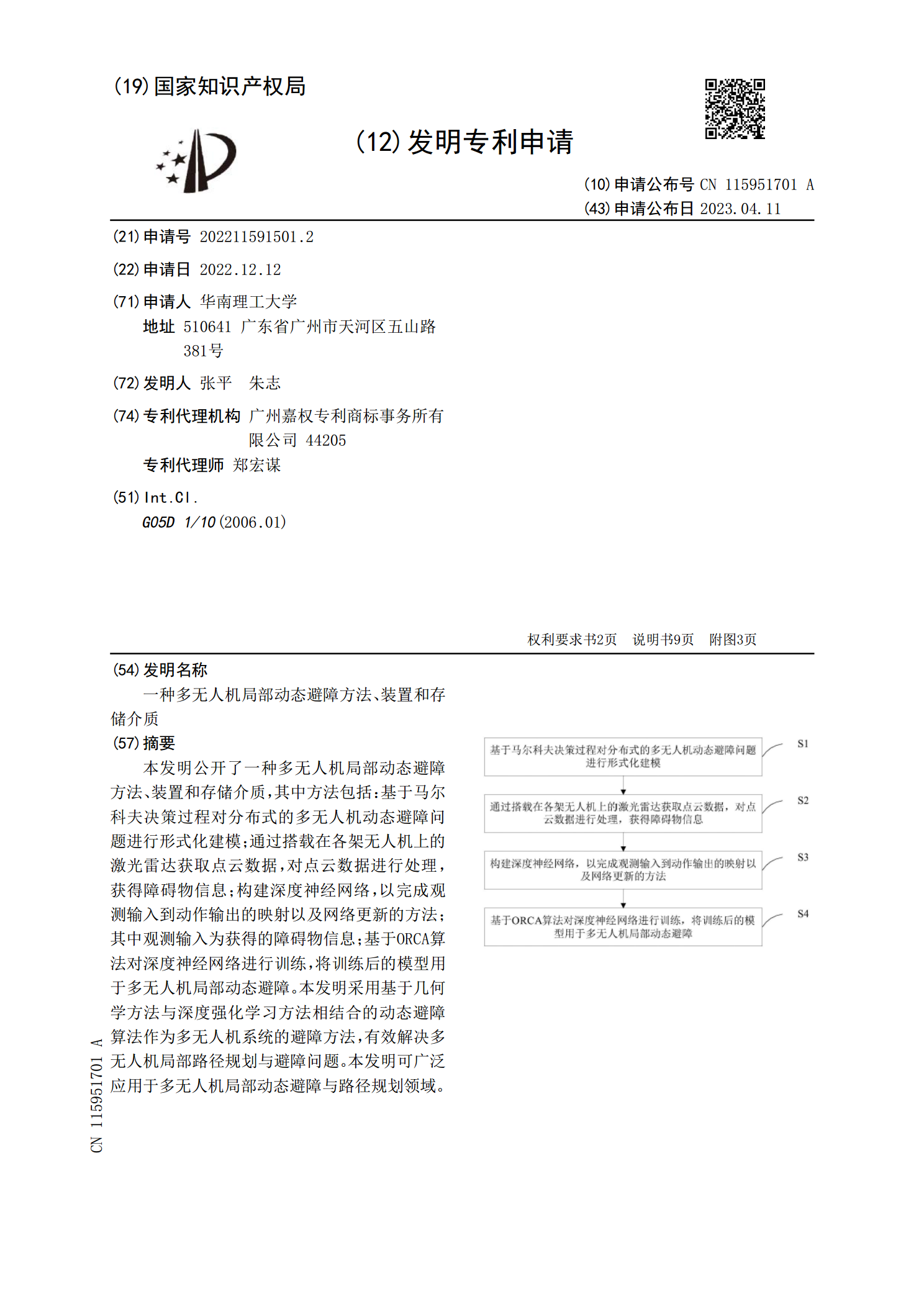
本发明公开了一种多无人机局部动态避障方法、装置和存储介质,其中方法包括:基于马尔科夫决策过程对分布式的多无人机动态避障问题进行形式化建模;通过搭载在各架无人机上的激光雷达获取点云数据,对点云数据进行处理,获得障碍物信息;构建深度神经网络,以完成观测输入到动作输出的映射以及网络更新的方法;其中观测输入为获得的障碍物信息;基于ORCA算法对深度神经网络进行训练,将训练后的模型用于多无人机局部动态避障。本发明采用基于几何学方法与深度强化学习方法相结合的动态避障算法作为多无人机系统的避障方法,有效解决多无人机局部

一种多无人机覆盖任务路径规划方法及装置.pdf
本发明涉及一种多无人机覆盖任务路径规划方法及装置,首先,基于各无人机的任务完成时间以及无人机最新分配的任务覆盖区域与所有标记为未被任务覆盖的区域之间的均衡有效任务比值确定各无人机所分配的区域列集,能够更加有效地进行区域分配,达到为无人机均衡分配任务的目的;其次,使用蚁群算法对无人机航线方向进行重规划,达到降低飞行消耗的目的;最后,在一次规划完成后,比较任务完成时间最大和最小的无人机的时间,若时间相差较大,则说明区域场景中存在超大区域,需对最大区域进行预留划分,迭代执行覆盖规划方案,达到均衡无人机任务时间的