
三维激光雷达点云和红外图像融合的目标检测及定位方法.pdf

小沛****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

三维激光雷达点云和红外图像融合的目标检测及定位方法.pdf
本发明公开了一种三维激光点云和红外图像融合的目标检测及定位方法,建立红外相机与三维激光雷达的坐标转换关系;红外相机采集红外图像,获得红外图像目标候选区域;三维激光雷达采集雷达数据,获得雷达目标候选区域及其中心点坐标;利用坐标转换关系将雷达目标候选区域投影到红外图像中,得到雷达聚类目标区域;将交并比达到设定门限的红外‑雷达公共区域作为最终目标区域保留下来;从最终目标区域中提取区域长宽比、最大温度和温度离散度组成聚合多特征输入分类器对红外目标进行分类,分类结果结合所述目标定位信息,得到红外目标检测及定位结果。
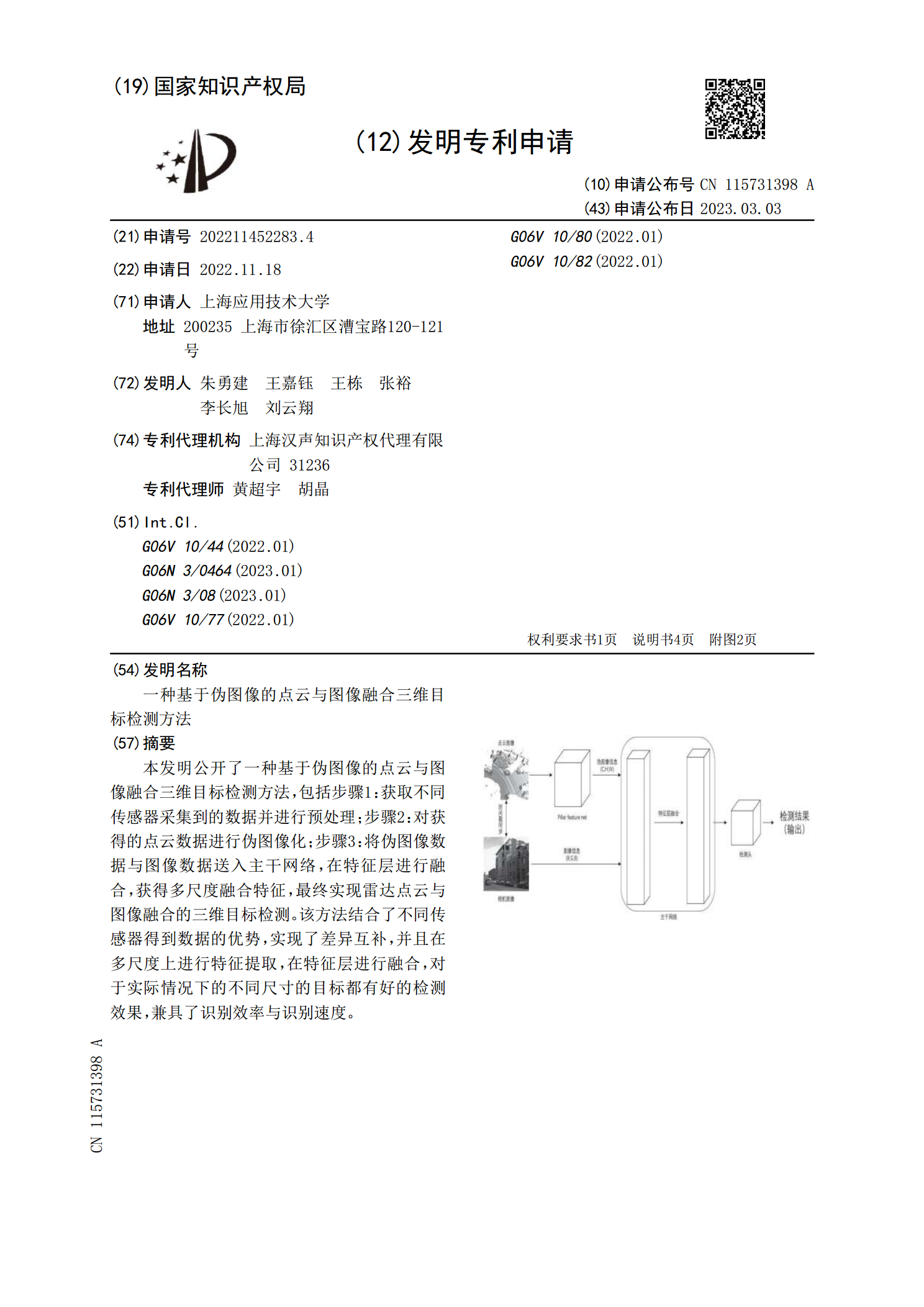
一种基于伪图像的点云与图像融合三维目标检测方法.pdf
本发明公开了一种基于伪图像的点云与图像融合三维目标检测方法,包括步骤1:获取不同传感器采集到的数据并进行预处理;步骤2:对获得的点云数据进行伪图像化;步骤3:将伪图像数据与图像数据送入主干网络,在特征层进行融合,获得多尺度融合特征,最终实现雷达点云与图像融合的三维目标检测。该方法结合了不同传感器得到数据的优势,实现了差异互补,并且在多尺度上进行特征提取,在特征层进行融合,对于实际情况下的不同尺寸的目标都有好的检测效果,兼具了识别效率与识别速度。

红外可见光融合图像的实时目标检测方法.pdf
本发明提供一种红外可见光融合图像的实时目标检测方法。本发明用DenseFuse融合模型对全局照度较高的可见光图像与红外图像进行融合,而对于全局照度较低的可见光图像进行了筛选,仅输出红外图像,减少恶劣环境下,可见光图像对融合的干扰。本发明使用了模型压缩与并行方法,极大的加速了融合检测的整体速度,实现了真正的实时检测。

基于图像融合的红外行人目标检测方法.pdf
本发明提供了基于图像融合的红外行人目标检测方法,其步骤为:1.建立红外行人目标检测数据集;2.使用训练过的Densefuse网络融合图像;3.构建并训练基于图像融合的YOLOv5红外行人目标检测模型;本发明使用Densefuse网络来融合构建的红外行人目标检测数据集中的可见光图像和红外图像对,加强了图像的质量并减少了冗余信息,得到了一个信息更加丰富的红外行人目标检测数据集;通过使用融合后的红外行人检测数据集来训练基于图像融合的YOLOv5红外行人目标检测模型,得到收敛良好的基于图像融合的YOLOv5红外行
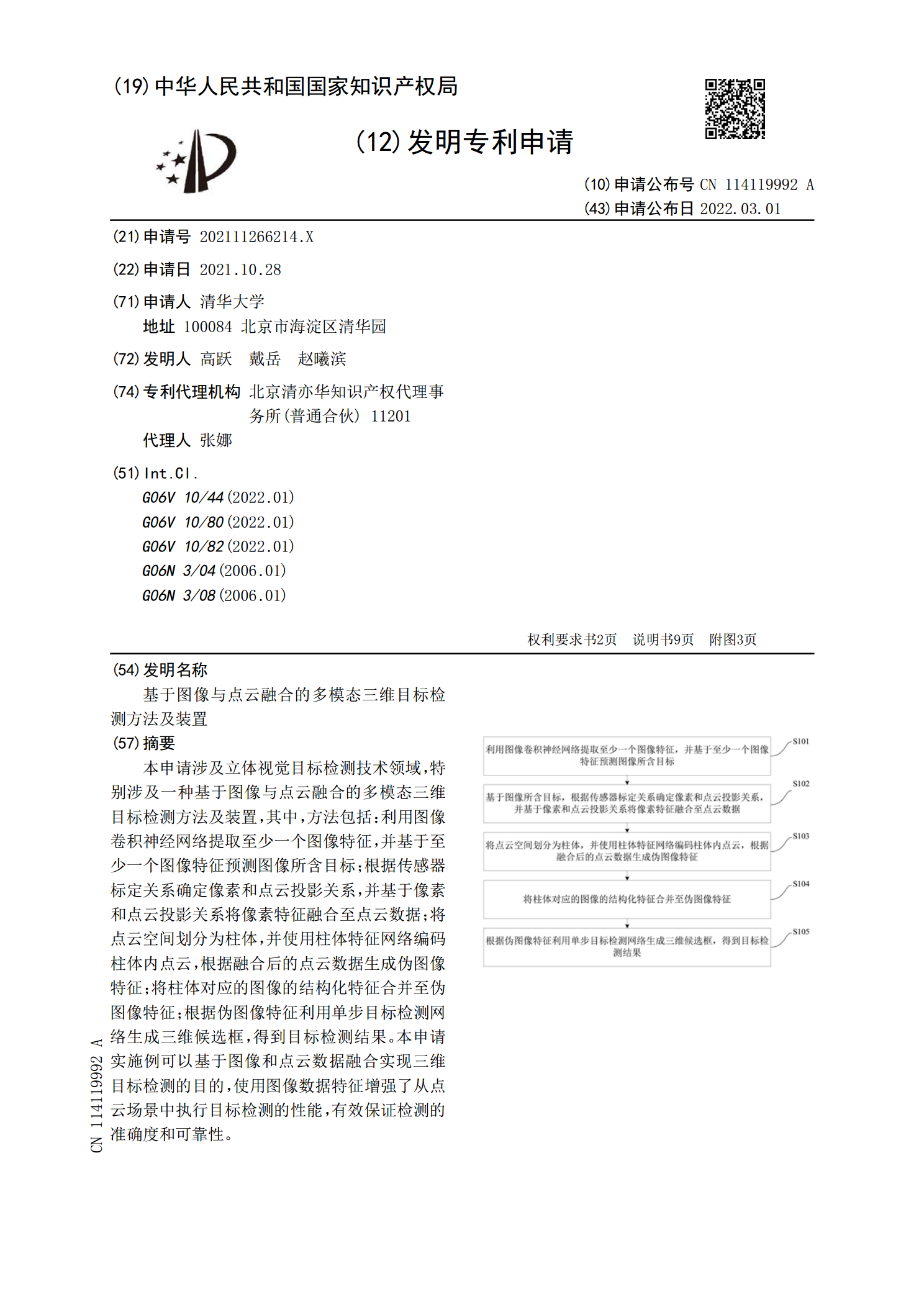
基于图像与点云融合的多模态三维目标检测方法及装置.pdf
本申请涉及立体视觉目标检测技术领域,特别涉及一种基于图像与点云融合的多模态三维目标检测方法及装置,其中,方法包括:利用图像卷积神经网络提取至少一个图像特征,并基于至少一个图像特征预测图像所含目标;根据传感器标定关系确定像素和点云投影关系,并基于像素和点云投影关系将像素特征融合至点云数据;将点云空间划分为柱体,并使用柱体特征网络编码柱体内点云,根据融合后的点云数据生成伪图像特征;将柱体对应的图像的结构化特征合并至伪图像特征;根据伪图像特征利用单步目标检测网络生成三维候选框,得到目标检测结果。本申请实施例可以