
一种基于深度学习的机器人书法方法.pdf

骊蓉****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于深度学习的机器人书法方法.pdf
本发明公开了一种基于深度学习的机器人书法方法,包括步骤:1)向生成式对抗网络提供目标字体和随机噪声,对生成式对抗网络的生成器G和判别器D进行训练,在保留原始数据的基础上得到具有目标风格的汉字书法图像;2)对具有目标风格的汉字书法图像进行二值化处理,去除图像噪声;3)将汉字书法图像骨架化,得到单像素连接的二值图像;4)根据二值图像获取书法汉字的笔画顺序和笔画宽度信息;5)根据书法汉字的笔画顺序和笔画宽度信息确定机器人的末端轨迹;6)根据机器人的末端轨迹得到机器人各关节的旋转角度。本发明解决了现有书法机器人书

一种基于深度学习的机器人轨迹跟踪控制方法.pdf
本发明提供了一种基于深度学习的机器人轨迹跟踪控制方法,属于机器人控制领域,包括:建立机器人的运动学模型、跟踪误差模型、动力学模型;建立基于长短时记忆神经网络LSTM和滑模控制SMC的控制器,所述控制器包括运动学控制器、基于SMC的动力学控制器和LSTM网络;基于所述机器人的运动学模型、跟踪误差模型、动力学模型,通过所述基于长短时记忆神经网络LSTM和滑模控制SMC的控制器对机器人跟踪轨迹进行控制。本发明提出的提出LSTM和SMC相结合的控制方法实现了LSTM网络对控制的补偿,提高收敛速度和控制的精度及稳定

一种基于力觉学习的机器人多风格书法临摹方法.pdf
本发明提供了一种基于力觉学习的机器人多风格书法临摹方法,属于工业机器人控制及应用领域;其包括有多风格标准字库模块、书法风格识别模块、笔画信息提取模块、机器人关节轨迹规划模块;本发明通过采集力信号提取不同书法风格的特征,利用卷积神经网络学习书法风格,使用图像处理算法获取笔画信息,并将对应风格的用力特征和笔画信息转换成为机器人末端轨迹;采用本发明的技术方案,通过对几个标准字的模仿学习,可以在保留原作品的风格特征的前提下,实现机器人对输入的书法图像进行临摹的目的。

一种基于深度学习的手写汉字书法识别方法.docx
一种基于深度学习的手写汉字书法识别方法标题:基于深度学习的手写汉字书法识别方法摘要:手写汉字书法是中国传统文化中的重要组成部分,因其艺术性和独特性而受到广泛关注。然而,手写汉字书法的识别一直是一个具有挑战性的问题。本论文提出了一种基于深度学习的手写汉字书法识别方法,该方法利用深度学习模型在大规模手写汉字数据集上进行训练,通过特征提取和模式匹配来实现准确的识别结果。实验结果表明,该方法在手写汉字书法的识别任务上取得了良好的性能,为推动手写汉字书法的数字化和自动化应用提供了有力支持。1.引言手写汉字书法作为一
一种基于深度强化学习的机器人抓取-抛掷方法.pdf
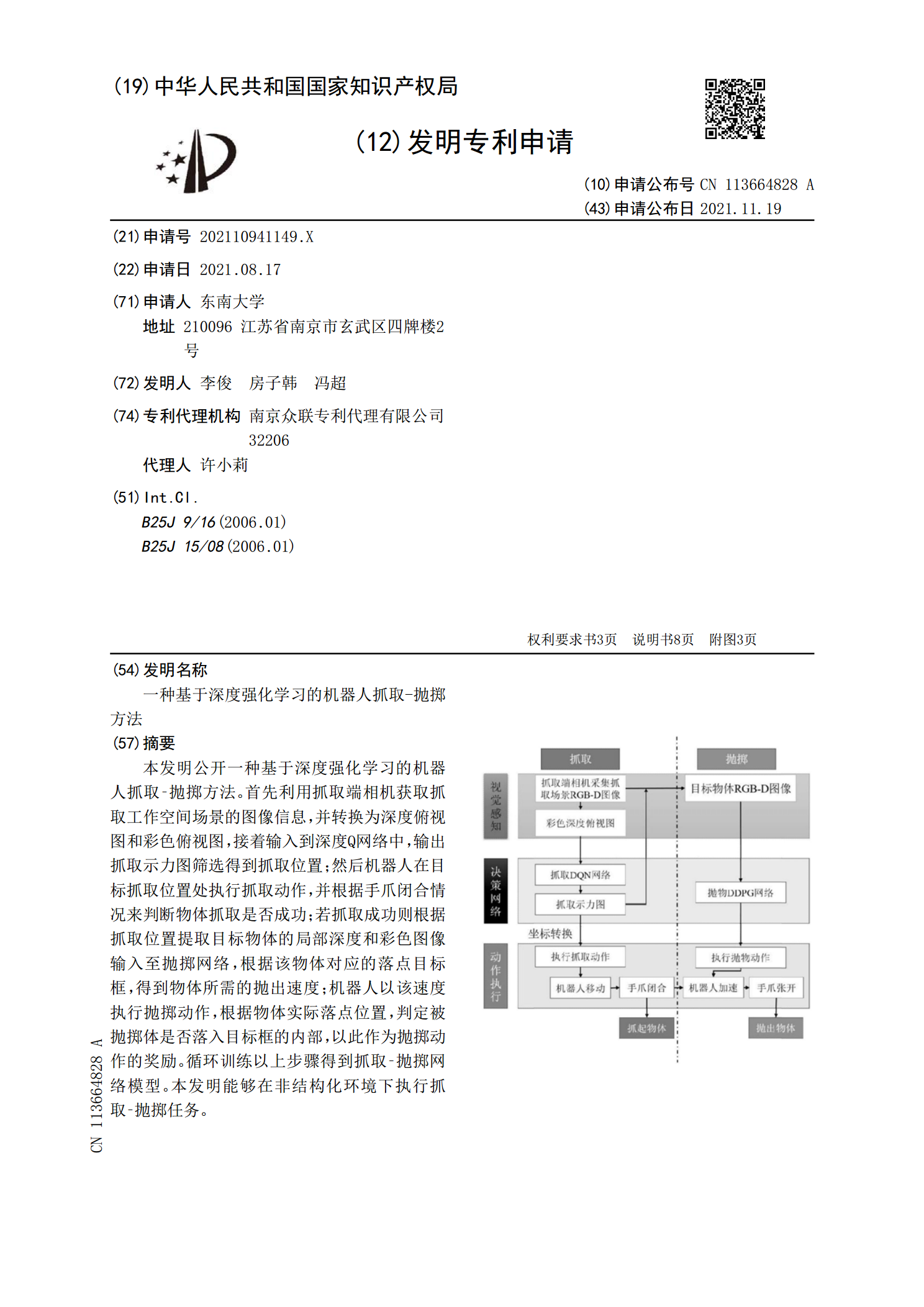
本发明公开一种基于深度强化学习的机器人抓取‑抛掷方法。首先利用抓取端相机获取抓取工作空间场景的图像信息,并转换为深度俯视图和彩色俯视图,接着输入到深度Q网络中,输出抓取示力图筛选得到抓取位置;然后机器人在目标抓取位置处执行抓取动作,并根据手爪闭合情况来判断物体抓取是否成功;若抓取成功则根据抓取位置提取目标物体的局部深度和彩色图像输入至抛掷网络,根据该物体对应的落点目标框,得到物体所需的抛出速度;机器人以该速度执行抛掷动作,根据物体实际落点位置,判定被抛掷体是否落入目标框的内部,以此作为抛掷动作的奖励。循环