
一种基于深度强化学习的机器人抓取-抛掷方法.pdf

Do****76


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于深度强化学习的机器人抓取-抛掷方法.pdf
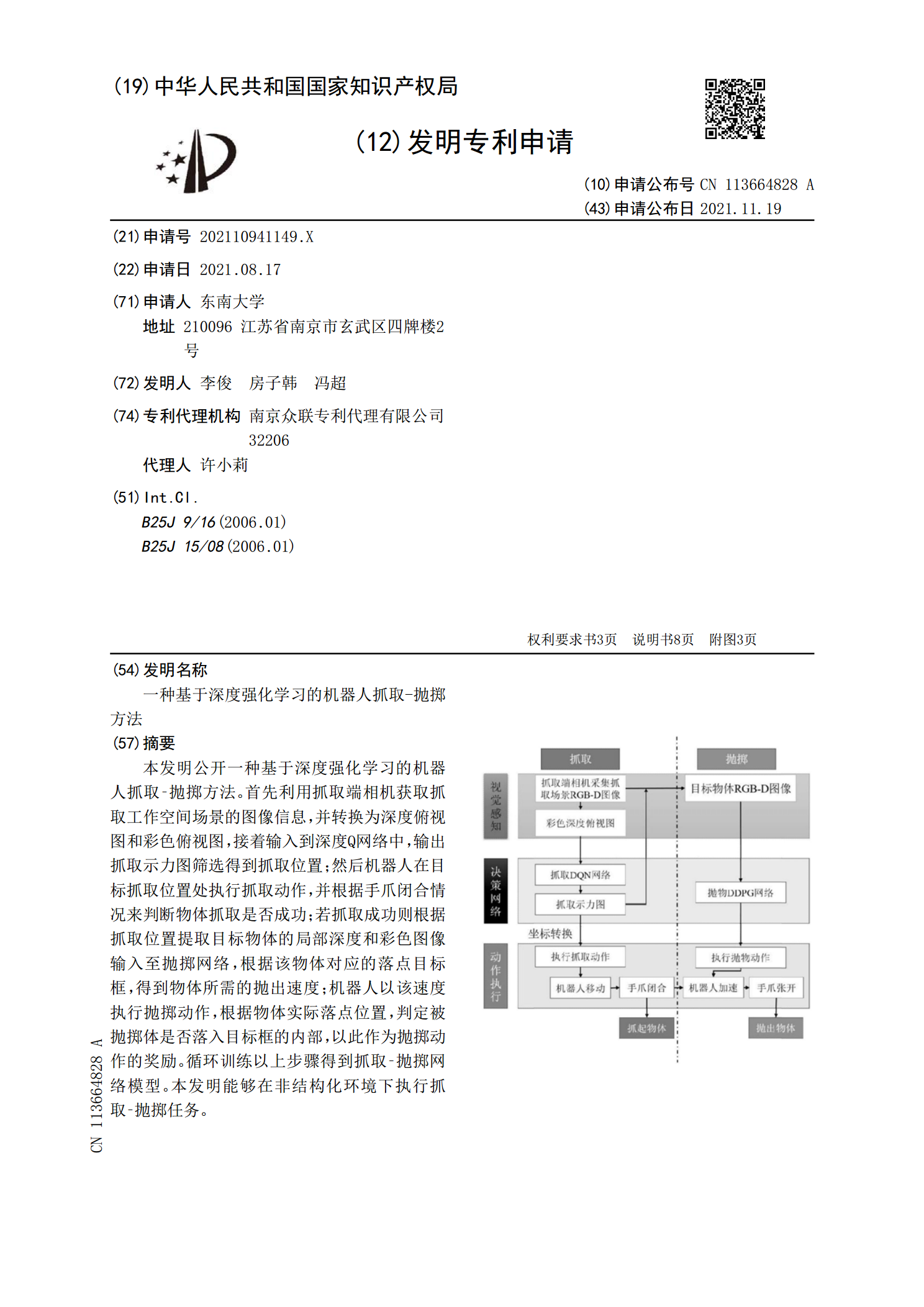
本发明公开一种基于深度强化学习的机器人抓取‑抛掷方法。首先利用抓取端相机获取抓取工作空间场景的图像信息,并转换为深度俯视图和彩色俯视图,接着输入到深度Q网络中,输出抓取示力图筛选得到抓取位置;然后机器人在目标抓取位置处执行抓取动作,并根据手爪闭合情况来判断物体抓取是否成功;若抓取成功则根据抓取位置提取目标物体的局部深度和彩色图像输入至抛掷网络,根据该物体对应的落点目标框,得到物体所需的抛出速度;机器人以该速度执行抛掷动作,根据物体实际落点位置,判定被抛掷体是否落入目标框的内部,以此作为抛掷动作的奖励。循环

基于深度强化学习的双臂机器人物体抓取.docx
基于深度强化学习的双臂机器人物体抓取深度强化学习在机器人学领域中扮演了重要的角色,它可以帮助机器人实现复杂的任务,如物体抓取。本文旨在探讨基于深度强化学习的双臂机器人物体抓取技术。1.引言现如今,机器人在工业、医疗、服务等领域得到了广泛应用。其中,双臂机器人作为一种灵活多变的机器人形态,能够进行更加复杂的任务,如物体抓取。然而,双臂机器人的物体抓取控制是一个具有挑战性的问题,因为它需要机器人根据感知信息和环境状态来决策和执行抓取动作。为了解决这一问题,深度强化学习被提出并应用于双臂机器人的物体抓取领域。2
一种基于深度强化学习的机器人抓取多目标物的训练方法.pdf
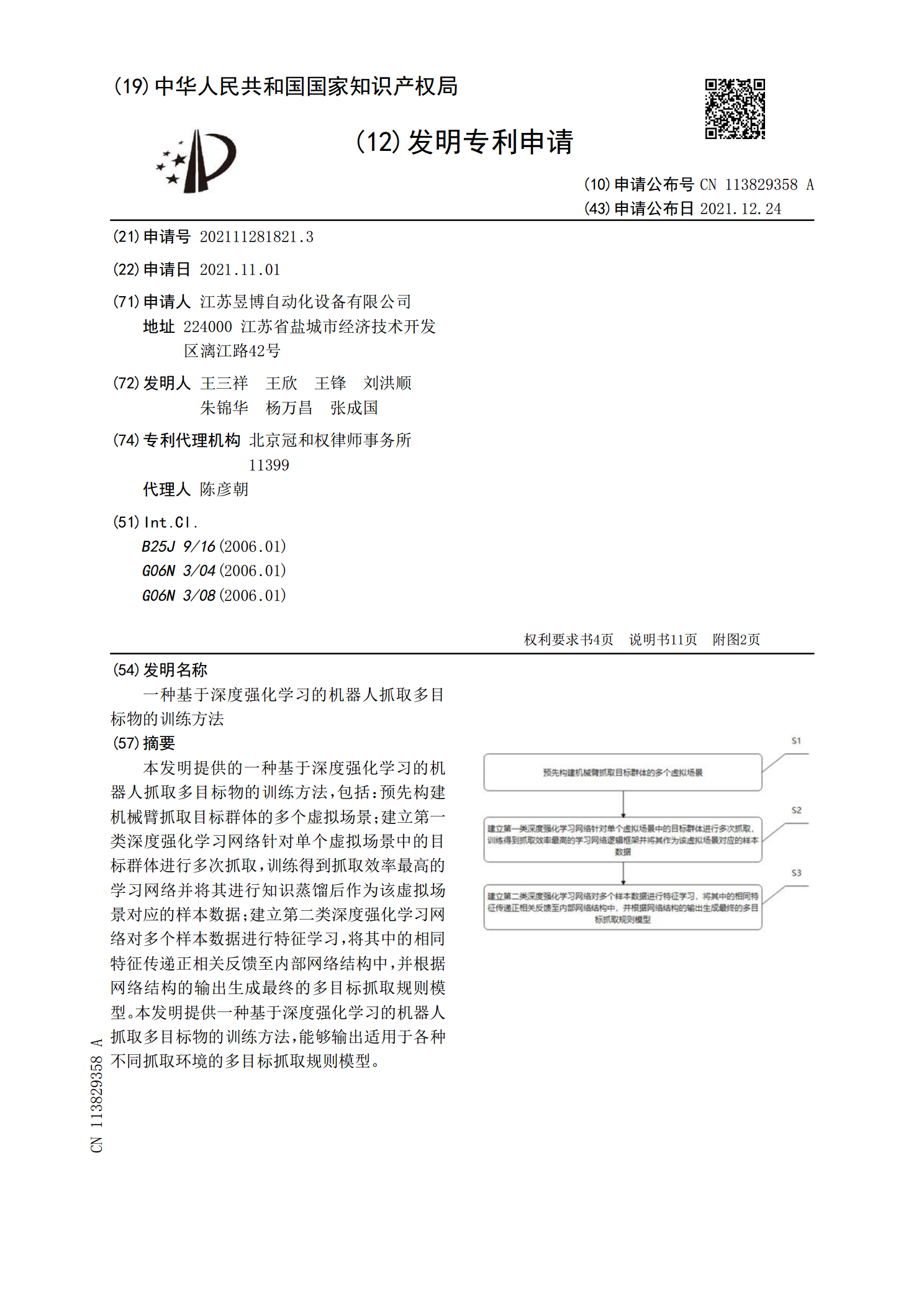
本发明提供的一种基于深度强化学习的机器人抓取多目标物的训练方法,包括:预先构建机械臂抓取目标群体的多个虚拟场景;建立第一类深度强化学习网络针对单个虚拟场景中的目标群体进行多次抓取,训练得到抓取效率最高的学习网络并将其进行知识蒸馏后作为该虚拟场景对应的样本数据;建立第二类深度强化学习网络对多个样本数据进行特征学习,将其中的相同特征传递正相关反馈至内部网络结构中,并根据网络结构的输出生成最终的多目标抓取规则模型。本发明提供一种基于深度强化学习的机器人抓取多目标物的训练方法,能够输出适用于各种不同抓取环境的多目

基于深度学习的机器人最优抓取姿态检测方法.docx
基于深度学习的机器人最优抓取姿态检测方法基于深度学习的机器人最优抓取姿态检测方法摘要:机器人的抓取姿态检测在机器人操作和自动化领域中起到了重要作用。本论文介绍了一种基于深度学习的机器人最优抓取姿态检测方法。该方法利用深度学习算法对物体进行特征提取和姿态估计,以实现机器人对物体的准确抓取。实验结果表明,该方法具有较高的准确度和鲁棒性,能够满足实际应用中对机器人抓取任务的需求。关键词:深度学习、抓取姿态检测、机器人、特征提取、姿态估计1.引言机器人在实际应用中扮演着越来越重要的角色,而机器人的抓取任务是其常见

一种基于深度学习的物体姿态识别抓取的搬运机器人方法.pdf
本发明提供了一种基于深度学习的物体姿态识别抓取的搬运机器人方法,包括:构建深度学习模型,并基于预设图像训练集对所述深度学习模型进行训练;获取待抓取目标物的目标图像,并基于训练后的深度学习模型对所述目标图像进行处理,得到所述目标物的位置及姿态信息;基于所述目标物的位置及姿态信息对搬运机器的抓取路径以及抓取方式进行规划,并基于规划结果对目标物进行抓取及搬运。通过提前对不同的工作任务进行训练,提高了搬运机器人对物体的识别效率,同时在搬运过程中能够快速规划搬运路径以及抓取方式,在保证安全搬运物体的前提下,提高了对