
一种基于深度学习的机器人轨迹跟踪控制方法.pdf

St****36


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于深度学习的机器人轨迹跟踪控制方法.pdf
本发明提供了一种基于深度学习的机器人轨迹跟踪控制方法,属于机器人控制领域,包括:建立机器人的运动学模型、跟踪误差模型、动力学模型;建立基于长短时记忆神经网络LSTM和滑模控制SMC的控制器,所述控制器包括运动学控制器、基于SMC的动力学控制器和LSTM网络;基于所述机器人的运动学模型、跟踪误差模型、动力学模型,通过所述基于长短时记忆神经网络LSTM和滑模控制SMC的控制器对机器人跟踪轨迹进行控制。本发明提出的提出LSTM和SMC相结合的控制方法实现了LSTM网络对控制的补偿,提高收敛速度和控制的精度及稳定

一种基于预瞄控制的Robocup足球机器人带球轨迹跟踪方法.docx
一种基于预瞄控制的Robocup足球机器人带球轨迹跟踪方法AbstractInthispaper,weproposeatrajectorytrackingmethodforRobocupsoccerrobotsbasedonpreviewcontrol.Themethodutilizesamodelpredictivecontroller(MPC)topredictthefuturemotionoftherobotandgeneratecontrolinputsforit.Theproposedmetho

基于深度强化学习的AUV轨迹跟踪方法研究.docx
基于深度强化学习的AUV轨迹跟踪方法研究基于深度强化学习的AUV轨迹跟踪方法研究摘要:随着海洋资源的开发和利用,自主水下机器人(AutonomousUnderwaterVehicle,AUV)在海洋领域的应用越来越广泛。AUV轨迹跟踪技术是AUV导航与控制的核心问题之一。本文提出了一种基于深度强化学习的AUV轨迹跟踪方法,该方法通过将传统的轨迹跟踪控制问题转化为强化学习问题,使用深度神经网络作为强化学习的函数近似器,实现自主学习和自适应控制。关键词:AUV;轨迹跟踪;深度强化学习;自主学习;自适应控制1.

巡检机器人轨迹跟踪控制方法.pdf
本发明公开了一种巡检机器人轨迹跟踪控制方法,具体步骤为:建立车轮轴中心与机器人参考位置不重合时的机器人前轮转向后轮驱动的运动学模型;根据机器人前轮转向后轮驱动的运动学模型建立机器人的原地转向模型;确定轨迹跟踪控制率,完成巡检机器人轨迹跟踪控制。本发明控制精确度高,鲁棒性好。
一种基于间歇迭代学习控制的平面机械臂轨迹跟踪方法.pdf
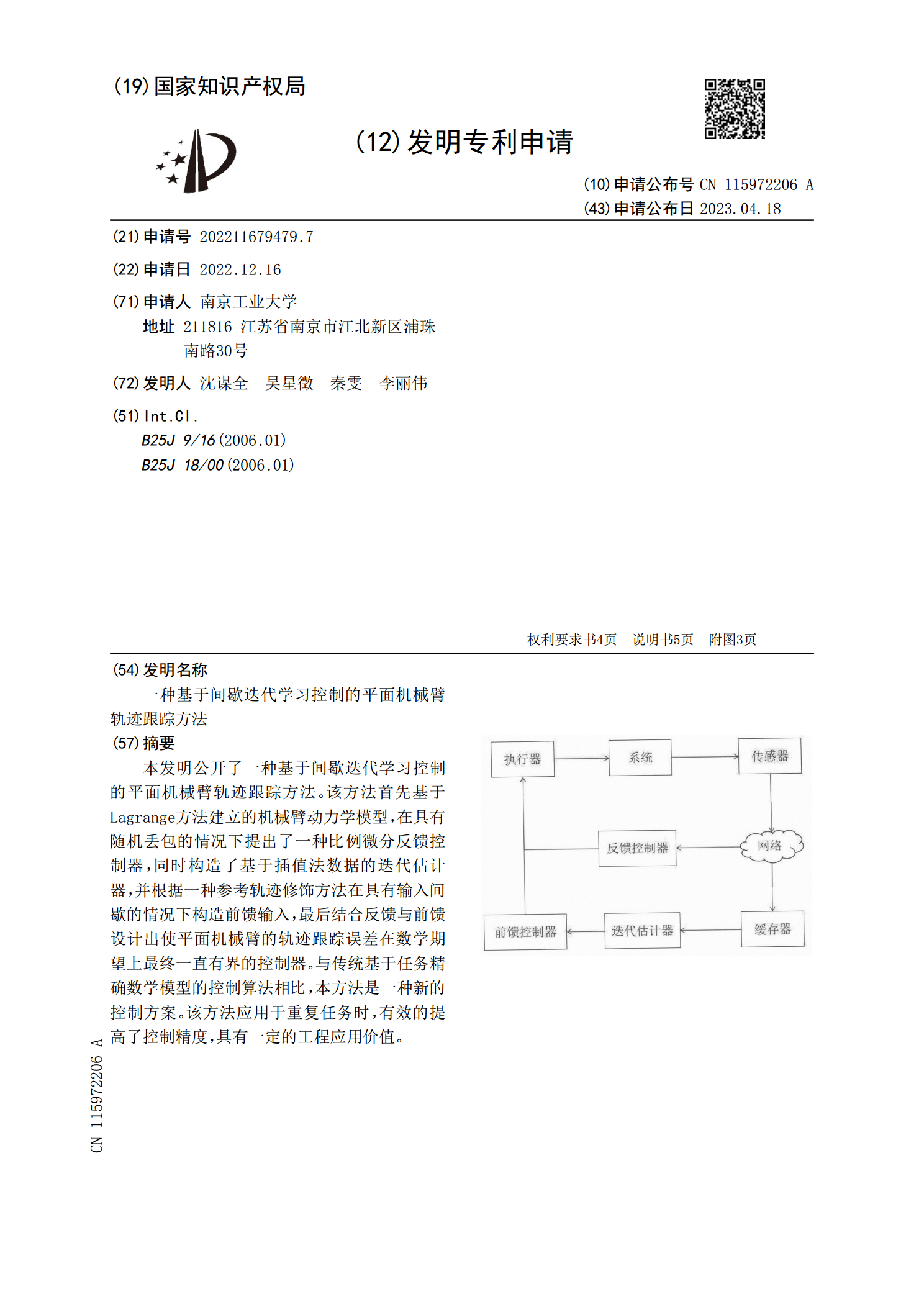
本发明公开了一种基于间歇迭代学习控制的平面机械臂轨迹跟踪方法。该方法首先基于Lagrange方法建立的机械臂动力学模型,在具有随机丢包的情况下提出了一种比例微分反馈控制器,同时构造了基于插值法数据的迭代估计器,并根据一种参考轨迹修饰方法在具有输入间歇的情况下构造前馈输入,最后结合反馈与前馈设计出使平面机械臂的轨迹跟踪误差在数学期望上最终一直有界的控制器。与传统基于任务精确数学模型的控制算法相比,本方法是一种新的控制方案。该方法应用于重复任务时,有效的提高了控制精度,具有一定的工程应用价值。