
云台及其控制方法、可移动平台.pdf

涵蓄****09

1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

云台及其控制方法、可移动平台.pdf
一种云台及其控制方法、可移动平台,方法包括:获取云台的工作参数,云台的工作参数包括云台的期望姿态(S201);若检测到工作参数与预设的人力掰动云台条件相匹配,则根据期望姿态和人力掰动云台时云台的实时姿态,确定云台的姿态转换速度(S202);按照人力掰动云台的方向和姿态转换速度,控制期望姿态为实时姿态(S203)。本方法在云台发生人力掰动时,可以按照人力掰动云台的方向以及根据期望姿态和人力掰动云台时云台的实时姿态所确定的姿态转换速度控制期望姿态趋向于实时姿态,使得云台停留在人力掰动云台时云台的实时姿态对应的
一种云台的控制方法、云台及可移动平台.pdf
提供一种云台的控制方法、云台及可移动平台。云台(201,70)包括承载机构(101,703)和姿态传感器(704),拍摄装置(202)通过承载机构(101,703)安装在云台(201,70)上。云台(201,70)的控制方法包括:获取姿态调整量,姿态调整量是根据用户的姿态调整操作确定的,姿态调整量包括横滚姿态调整量;获取姿态传感器(704)的传感数据,并根据传感数据确定承载机构(101,703)的实际姿态;根据承载机构的实际姿态和姿态调整量控制承载机构(101,703)的姿态。可以通过控制云台中承载机构(
可移动平台的控制方法、装置、可移动平台及存储介质.pdf
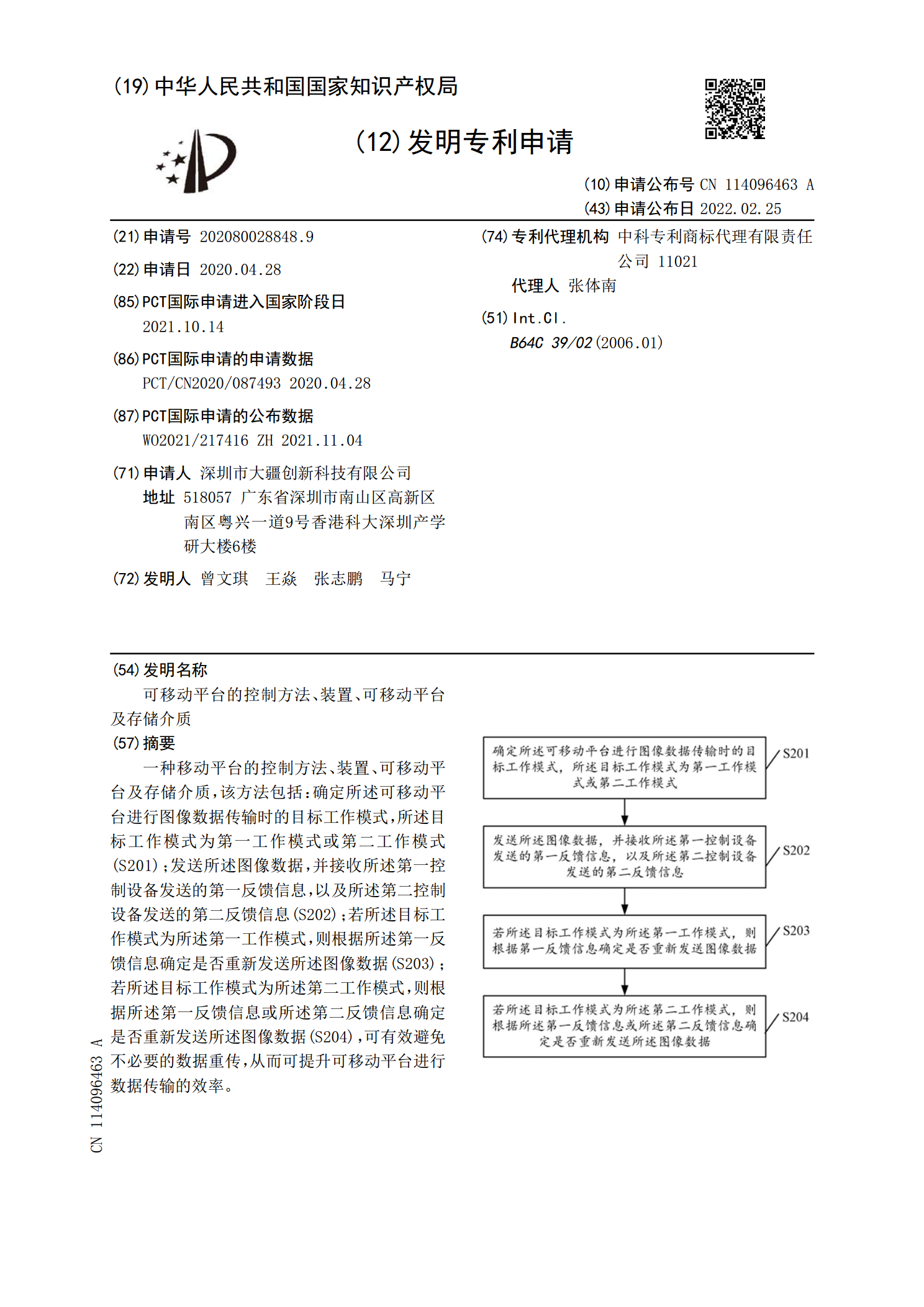
一种移动平台的控制方法、装置、可移动平台及存储介质,该方法包括:确定所述可移动平台进行图像数据传输时的目标工作模式,所述目标工作模式为第一工作模式或第二工作模式(S201);发送所述图像数据,并接收所述第一控制设备发送的第一反馈信息,以及所述第二控制设备发送的第二反馈信息(S202);若所述目标工作模式为所述第一工作模式,则根据所述第一反馈信息确定是否重新发送所述图像数据(S203);若所述目标工作模式为所述第二工作模式,则根据所述第一反馈信息或所述第二反馈信息确定是否重新发送所述图像数据(S204),可
可移动平台的控制方法、装置、可移动平台及存储介质.pdf
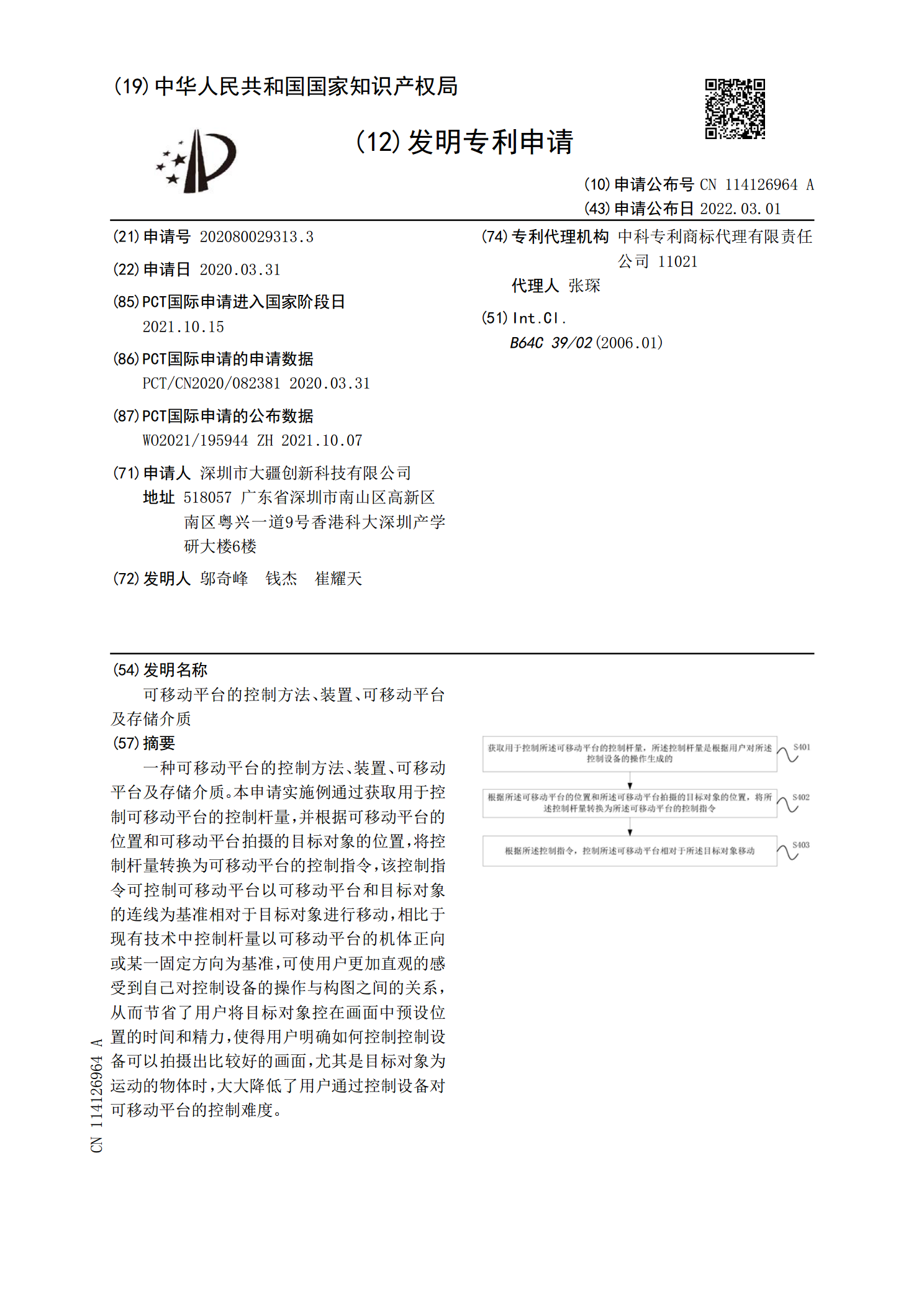
一种可移动平台的控制方法、装置、可移动平台及存储介质。本申请实施例通过获取用于控制可移动平台的控制杆量,并根据可移动平台的位置和可移动平台拍摄的目标对象的位置,将控制杆量转换为可移动平台的控制指令,该控制指令可控制可移动平台以可移动平台和目标对象的连线为基准相对于目标对象进行移动,相比于现有技术中控制杆量以可移动平台的机体正向或某一固定方向为基准,可使用户更加直观的感受到自己对控制设备的操作与构图之间的关系,从而节省了用户将目标对象控在画面中预设位置的时间和精力,使得用户明确如何控制控制设备可以拍摄出比较
可移动平台的控制方法和设备.pdf
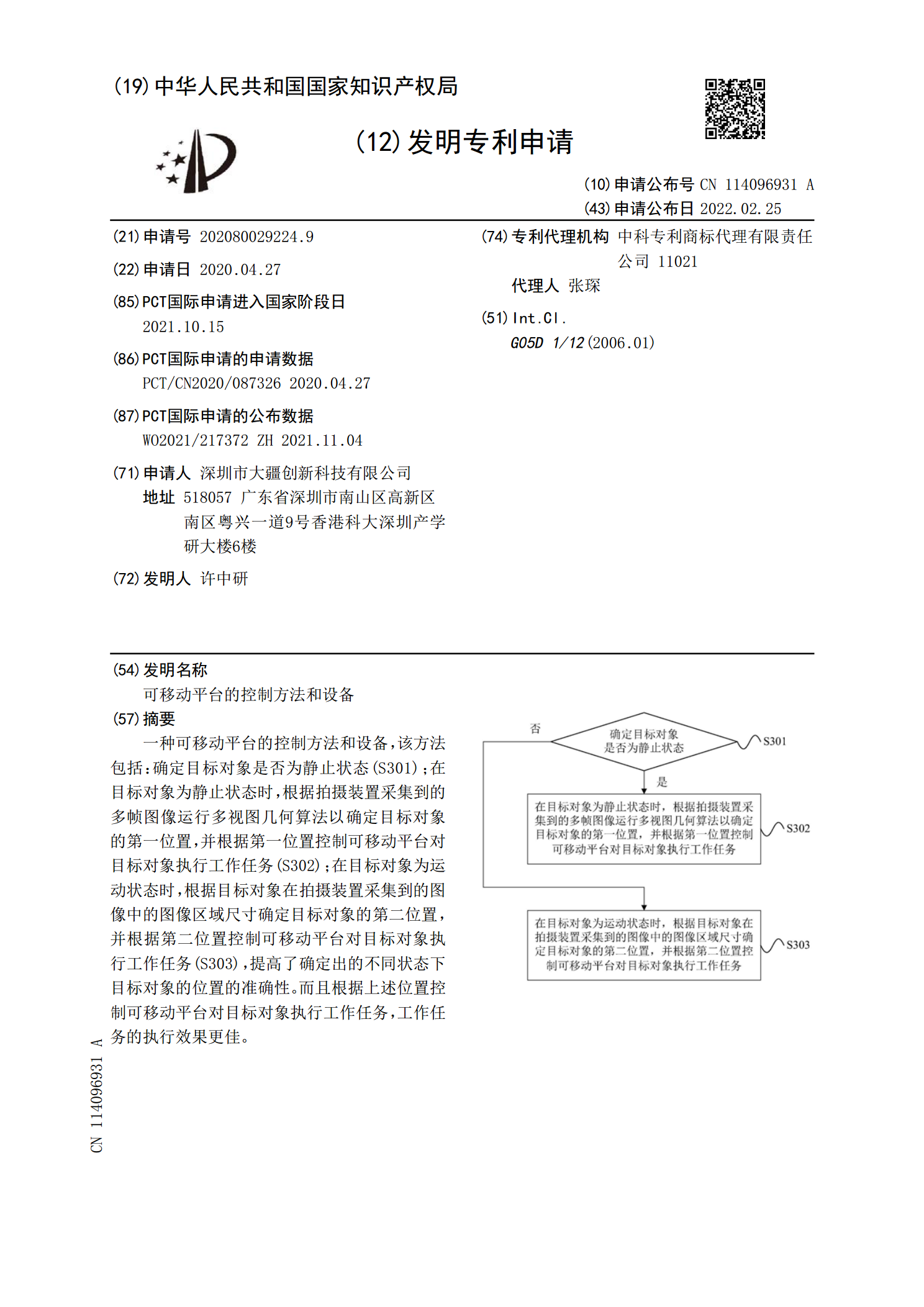
一种可移动平台的控制方法和设备,该方法包括:确定目标对象是否为静止状态(S301);在目标对象为静止状态时,根据拍摄装置采集到的多帧图像运行多视图几何算法以确定目标对象的第一位置,并根据第一位置控制可移动平台对目标对象执行工作任务(S302);在目标对象为运动状态时,根据目标对象在拍摄装置采集到的图像中的图像区域尺寸确定目标对象的第二位置,并根据第二位置控制可移动平台对目标对象执行工作任务(S303),提高了确定出的不同状态下目标对象的位置的准确性。而且根据上述位置控制可移动平台对目标对象执行工作任务,工