
一种用于AGV系统的自动充电桩.pdf

一条****贺6


1/8

2/8

3/8

4/8
5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于AGV系统的自动充电桩.pdf
本发明公开了一种用于AGV系统的自动充电桩,包括用于器件安装载体的充电桩箱体以及安装在充电桩箱体前端用于供电连接的充电头组件,所述充电桩箱体内部固定安装有用于与充电头组件连接的供电机构。本发明所述的一种用于AGV系统的自动充电桩,一是固定架留有滑槽,方便调整安装高度,使其适合各种充电设备的高度,二是充电时,弹簧被压缩,由于充电头直径较小的颈部到达绝缘安装板孔位,此时充电头可以存在一定角度的偏摆,保证充电头和机器人充电板始终保持面接触,减小接触电阻,降低发热,三是充电桩箱体内柔性线缆连接充电头和充电接口板,
用于AGV的充电桩.pdf
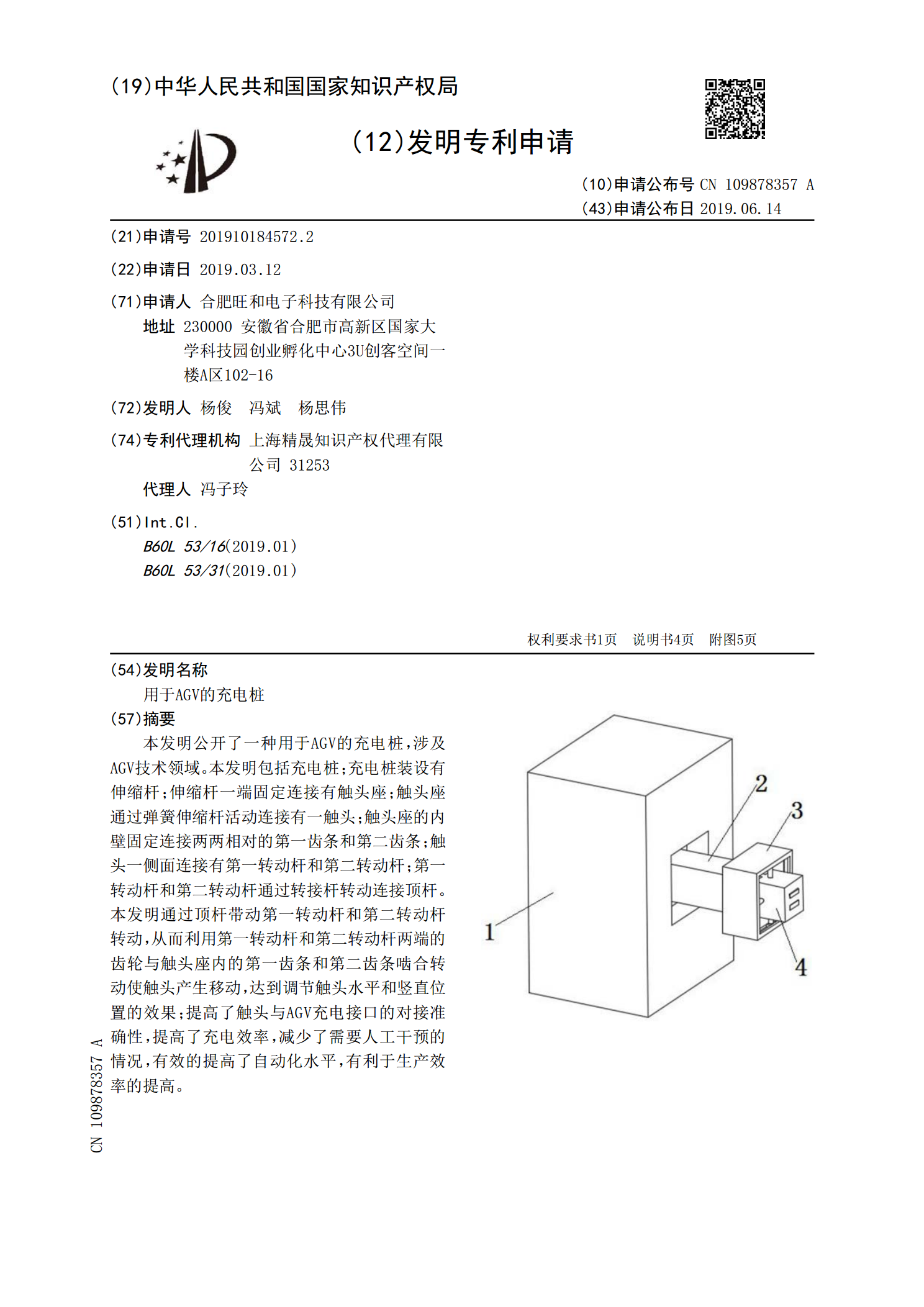
本发明公开了一种用于AGV的充电桩,涉及AGV技术领域。本发明包括充电桩;充电桩装设有伸缩杆;伸缩杆一端固定连接有触头座;触头座通过弹簧伸缩杆活动连接有一触头;触头座的内壁固定连接两两相对的第一齿条和第二齿条;触头一侧面连接有第一转动杆和第二转动杆;第一转动杆和第二转动杆通过转接杆转动连接顶杆。本发明通过顶杆带动第一转动杆和第二转动杆转动,从而利用第一转动杆和第二转动杆两端的齿轮与触头座内的第一齿条和第二齿条啮合转动使触头产生移动,达到调节触头水平和竖直位置的效果;提高了触头与AGV充电接口的对接准确性,
一种用于AGV小车的自动充电装置.pdf
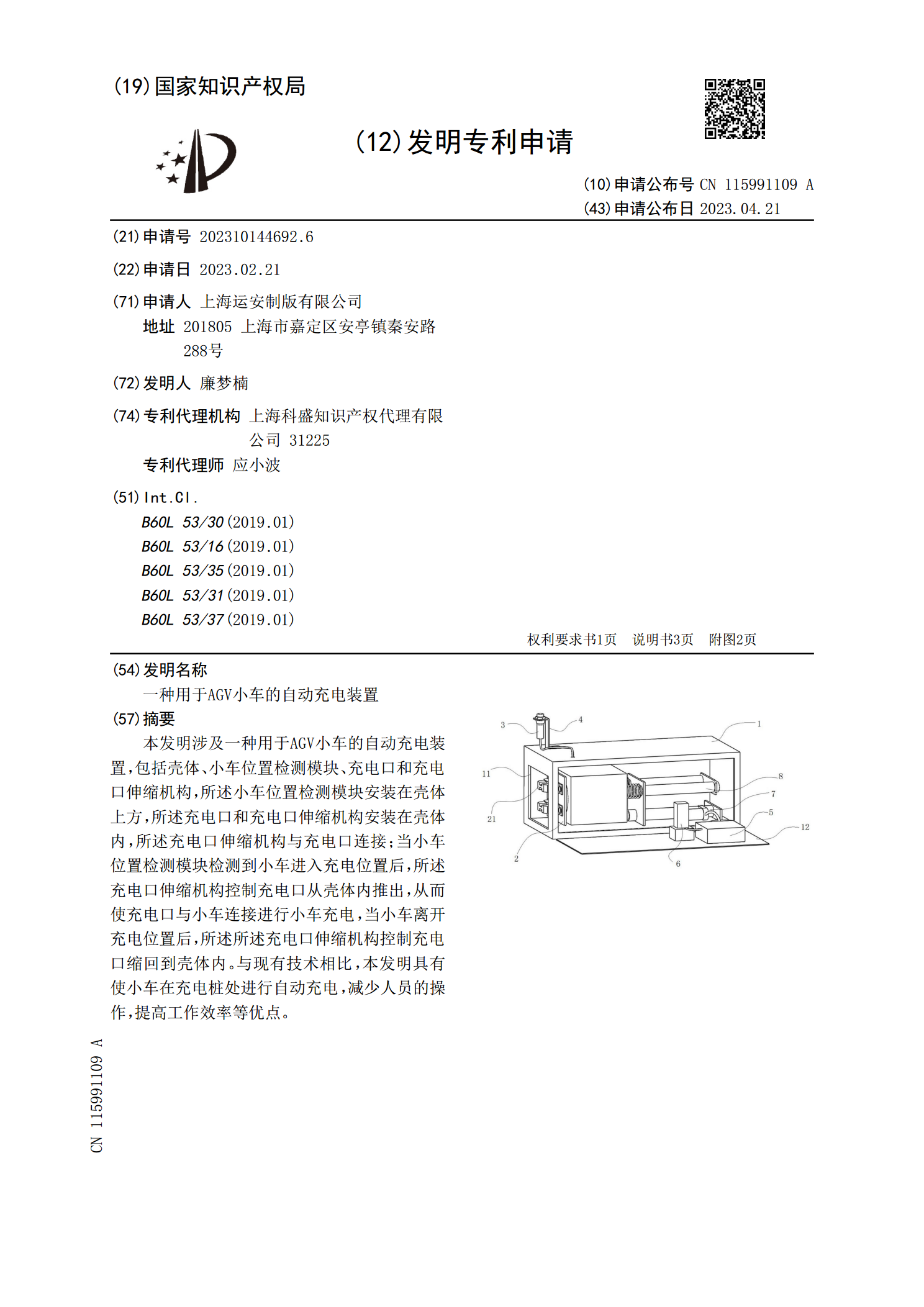
本发明涉及一种用于AGV小车的自动充电装置,包括壳体、小车位置检测模块、充电口和充电口伸缩机构,所述小车位置检测模块安装在壳体上方,所述充电口和充电口伸缩机构安装在壳体内,所述充电口伸缩机构与充电口连接;当小车位置检测模块检测到小车进入充电位置后,所述充电口伸缩机构控制充电口从壳体内推出,从而使充电口与小车连接进行小车充电,当小车离开充电位置后,所述所述充电口伸缩机构控制充电口缩回到壳体内。与现有技术相比,本发明具有使小车在充电桩处进行自动充电,减少人员的操作,提高工作效率等优点。
一种AGV用触发式自动充电桩结构.pdf
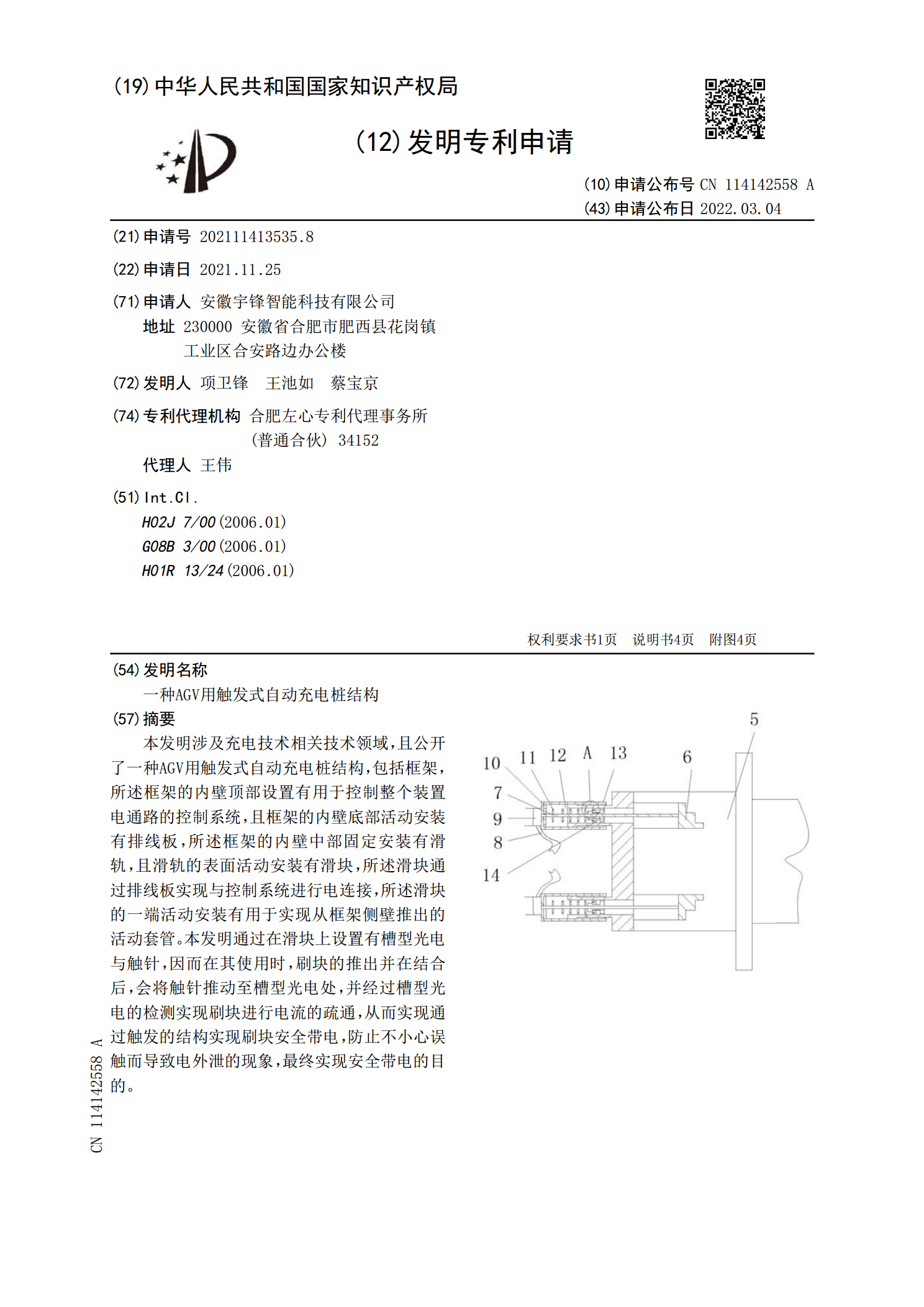
本发明涉及充电技术相关技术领域,且公开了一种AGV用触发式自动充电桩结构,包括框架,所述框架的内壁顶部设置有用于控制整个装置电通路的控制系统,且框架的内壁底部活动安装有排线板,所述框架的内壁中部固定安装有滑轨,且滑轨的表面活动安装有滑块,所述滑块通过排线板实现与控制系统进行电连接,所述滑块的一端活动安装有用于实现从框架侧壁推出的活动套管。本发明通过在滑块上设置有槽型光电与触针,因而在其使用时,刷块的推出并在结合后,会将触针推动至槽型光电处,并经过槽型光电的检测实现刷块进行电流的疏通,从而实现通过触发的结构
一种带有自动收线功能的充电桩及充电桩管理系统.pdf
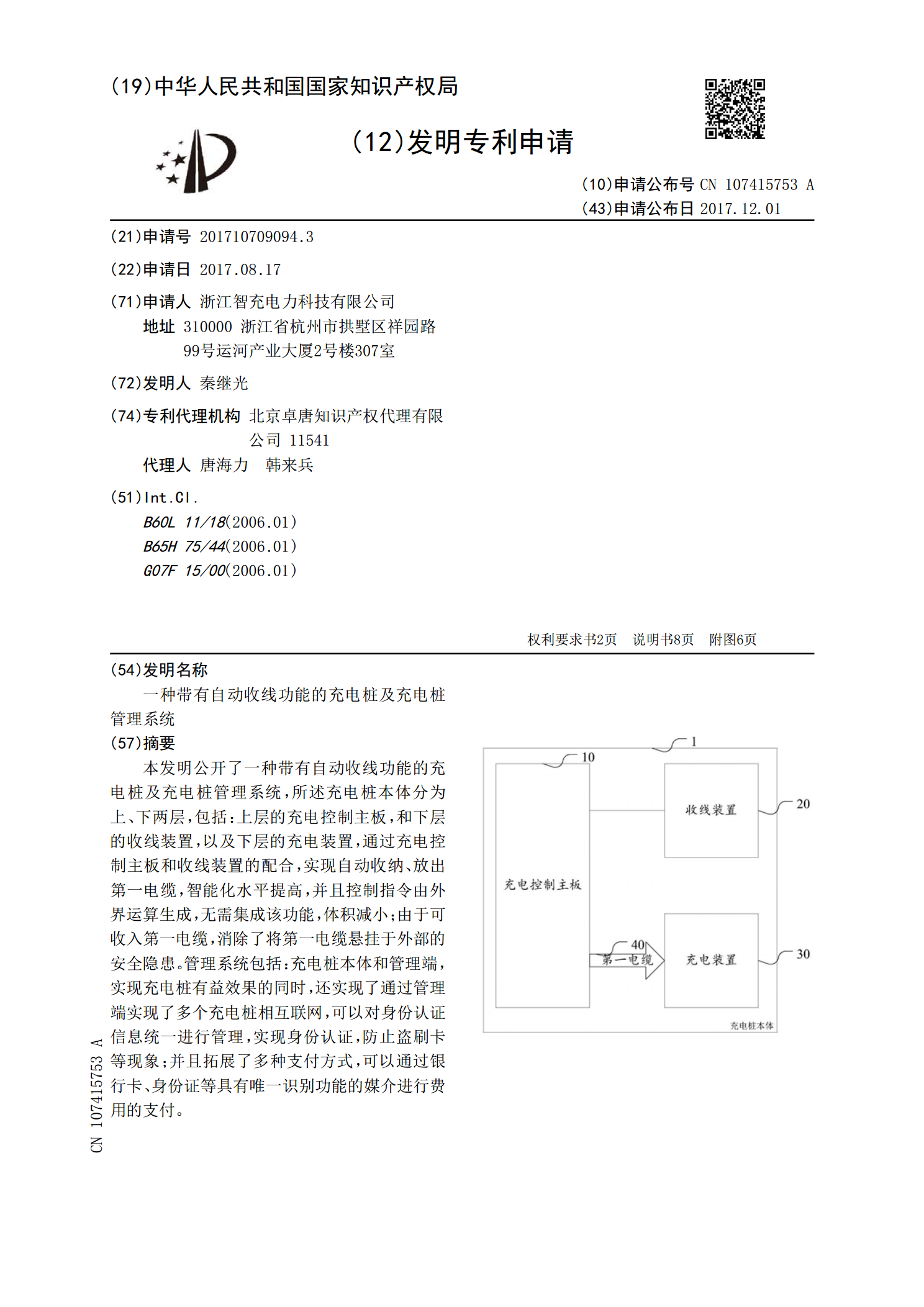
本发明公开了一种带有自动收线功能的充电桩及充电桩管理系统,所述充电桩本体分为上、下两层,包括:上层的充电控制主板,和下层的收线装置,以及下层的充电装置,通过充电控制主板和收线装置的配合,实现自动收纳、放出第一电缆,智能化水平提高,并且控制指令由外界运算生成,无需集成该功能,体积减小;由于可收入第一电缆,消除了将第一电缆悬挂于外部的安全隐患。管理系统包括:充电桩本体和管理端,实现充电桩有益效果的同时,还实现了通过管理端实现了多个充电桩相互联网,可以对身份认证信息统一进行管理,实现身份认证,防止盗刷卡等现象;