
一种智能冰箱以及货物存取方法.pdf

文库****坚白


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种智能冰箱以及货物存取方法.pdf
本发明提供了一种智能冰箱以及货物存取方法。通过本发明的智能冰箱,人们在网上下单购买了生鲜食材,却在收货时间无人在家时,送货员或送货机器人可以将食材寄存在该智能冰箱内,该智能冰箱内的存储空间具有冷气,可为食材保鲜。同时,本发明的智能冰箱配置有与机器人相匹配的运货机构,可以将机器人送来的货物存放到任一高度位置的存储空间中,从而可节省人工送货所需的人工成本。本发明的货物存取方法,可以满足机器人送货的同时,通过各温度传感器,可得知空的存储空间中温度最低的存储空间,从而能最大程度地利用上次留下的冷气,减少本次存放货

基于智能保鲜柜的货物存取方法与装置.pdf
本发明提供了一种基于智能保鲜柜的货物存取方法与装置,涉及柜子领域。该基于智能保鲜柜的货物存取方法应用于基于智能保鲜柜的货物存取系统,所述系统包括后台服务器和智能保鲜柜,所述智能保鲜柜包括多个抽屉,所述后台服务器预存储有送货员身份信息,所述后台服务器和所述智能保鲜柜预建立通信连接。本发明实施例提供的基于智能保鲜柜的货物存取方法与装置,可应用于电商购买蔬菜的收货和贮藏环节中,满足了小区多个用户的贮藏需要,当顾客不在家,送货员无法及时将蔬菜放入冰箱时,基于电商购买的应用场景,可对蔬菜进行临时保鲜。

冰箱、冰箱内的物品存取方法及系统.pdf
本申请提供了一种冰箱,包括:形成有容纳腔室的箱体和用于密闭箱体的门;位于容纳腔室内的多个存放隔室;位于箱体内的用于驱动多个存放隔室中的至少部分的存放隔室在存取位置和非存取位置之间运动的驱动装置;布置在箱体上的用户身份录入/识别装置;布置在箱体内的与用户身份录入/识别装置和驱动装置连接的控制装置,用于将录入的身份信息与至少一个存放隔室的位置信息关联,并根据识别的身份信息向驱动装置发送驱动指令,以将对应的存放隔室从非存取位置运动到存取位置。本申请还提供了冰箱内的物品存取方法及系统。本申请所示实施例与现有技术相
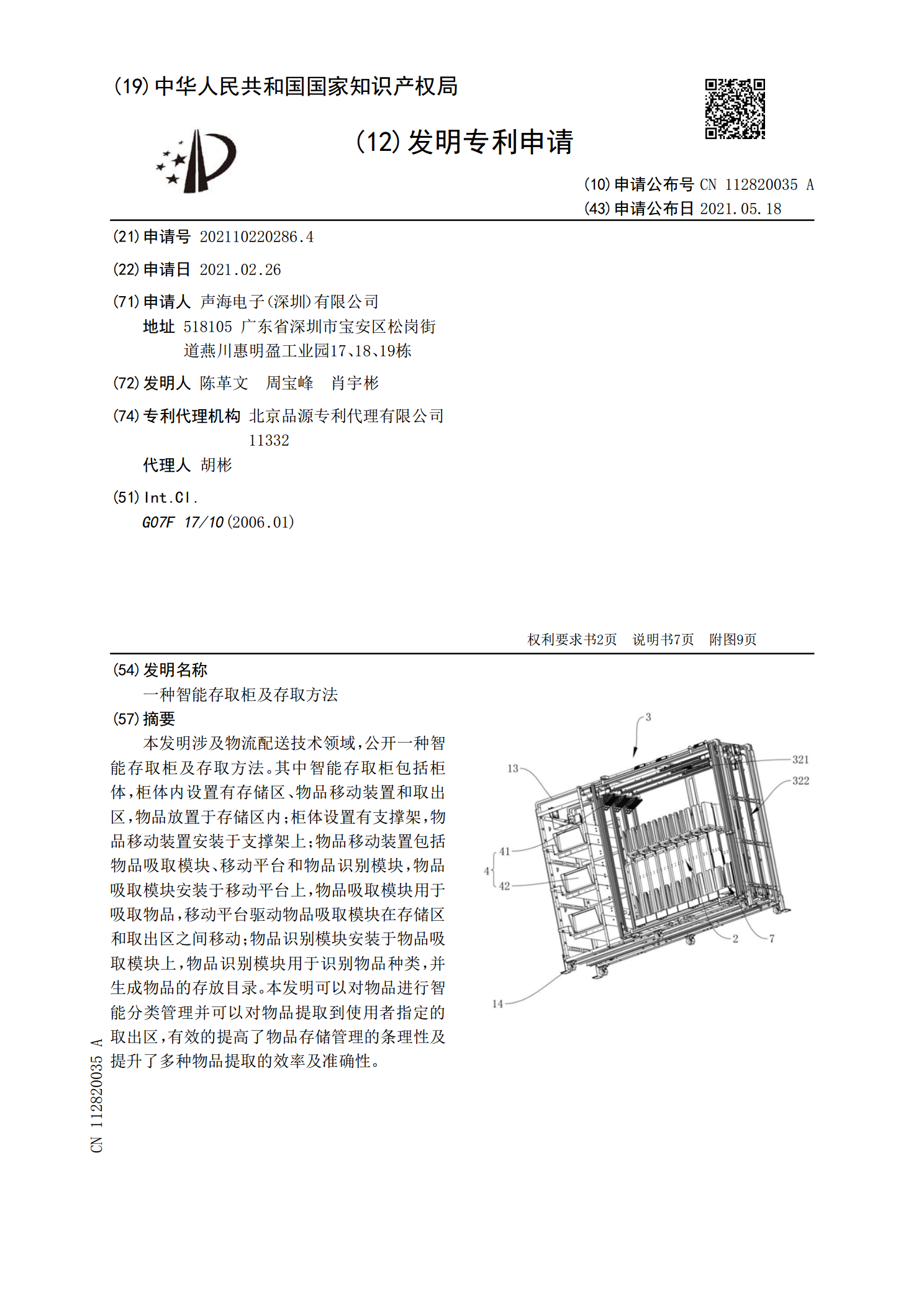
一种智能存取柜及存取方法.pdf
本发明涉及物流配送技术领域,公开一种智能存取柜及存取方法。其中智能存取柜包括柜体,柜体内设置有存储区、物品移动装置和取出区,物品放置于存储区内;柜体设置有支撑架,物品移动装置安装于支撑架上;物品移动装置包括物品吸取模块、移动平台和物品识别模块,物品吸取模块安装于移动平台上,物品吸取模块用于吸取物品,移动平台驱动物品吸取模块在存储区和取出区之间移动;物品识别模块安装于物品吸取模块上,物品识别模块用于识别物品种类,并生成物品的存放目录。本发明可以对物品进行智能分类管理并可以对物品提取到使用者指定的取出区,有效
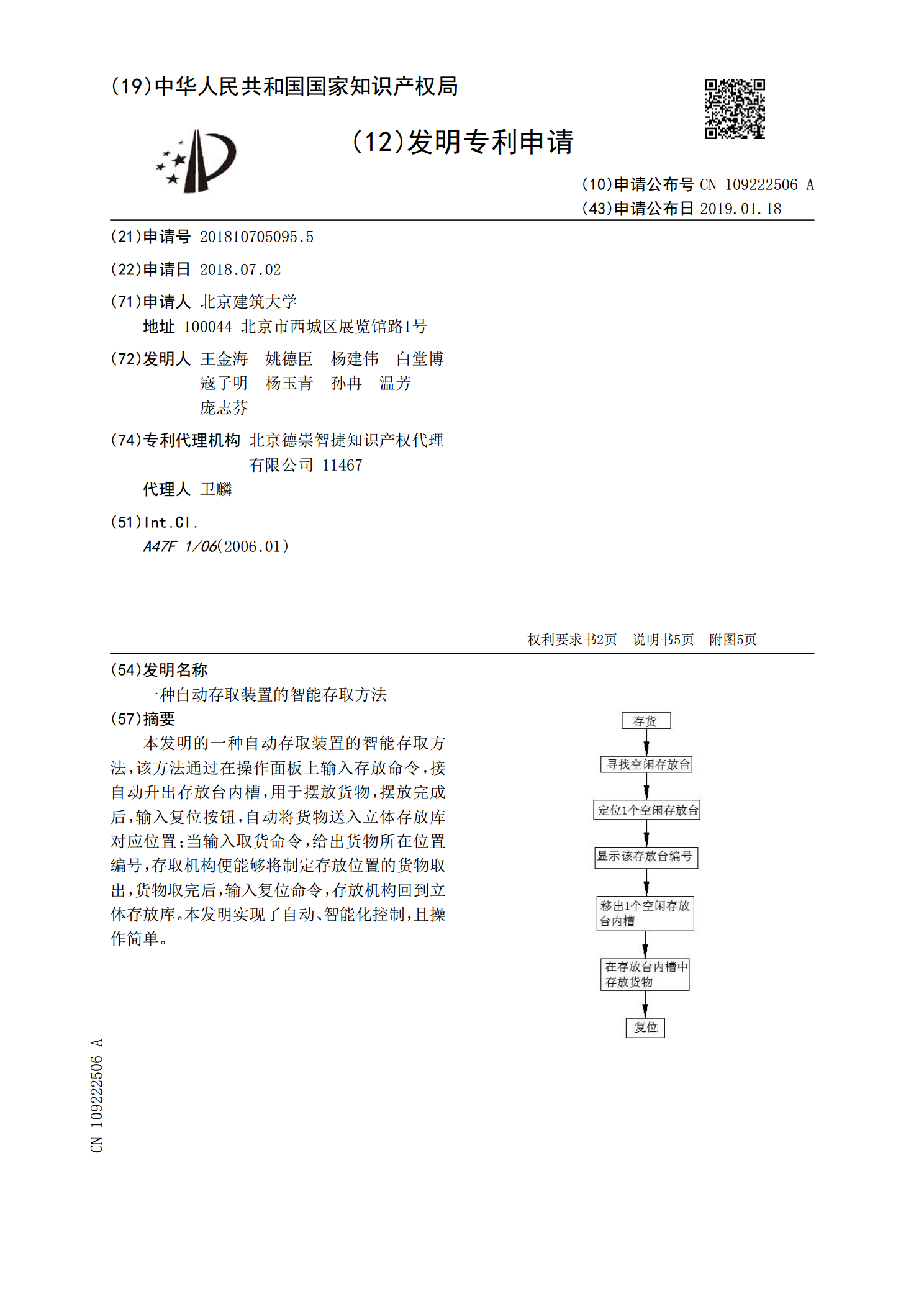
一种自动存取装置的智能存取方法.pdf
本发明的一种自动存取装置的智能存取方法,该方法通过在操作面板上输入存放命令,接自动升出存放台内槽,用于摆放货物,摆放完成后,输入复位按钮,自动将货物送入立体存放库对应位置;当输入取货命令,给出货物所在位置编号,存取机构便能够将制定存放位置的货物取出,货物取完后,输入复位命令,存放机构回到立体存放库。本发明实现了自动、智能化控制,且操作简单。