
打胶拼接方法、装置、存储介质及打胶机器人.pdf

一只****生物


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

打胶拼接方法、装置、存储介质及打胶机器人.pdf
本申请涉及打胶机器人领域,具体涉及一种打胶拼接方法、装置、存储介质及打胶机器人,所述方法包括:控制机械臂带动胶筒移动沿着第一打胶轨迹打胶至收胶位置时,控制胶筒电机反转以撤除电机推杆对胶筒的压力,并继续控制机械臂带动胶筒自所述收胶位置移动至所述第一打胶轨迹的末端;控制机械臂带动胶筒移动至预设位置清除胶嘴上的残留胶;控制所述胶筒电机将胶筒推动至出胶状态;以所述第一打胶轨迹的末端为第二打胶轨迹起点,控制机械臂带动胶筒沿着第二打胶轨迹进行打胶。本申请能够提高打胶机器人在断胶场景后进行打胶拼接作业的质量及效率。

打胶机及其打胶方法.pdf
本发明公开了一种打胶机,包括:胶箱,用于储存胶料;与胶箱通过管道连通的打胶头;转轴;至少一个安装于转轴上的齿轮组,每个齿轮组由两个齿与齿对齐的齿轮组成;所述打胶头可以在转轴的长度范围内运动。本发明还提供一种上述打胶机的打胶方法。胶料从胶箱中经过管道流入到打胶头中,打胶头对准放入到齿轮之间的两片滤布中间进行打胶,打胶时打胶头从一端向另一端慢慢移动,从而打出一条胶,打出的胶将两片滤布紧密的粘合在一起,打好一条胶,等胶干了之后,齿轮组向内旋转一个齿的角度,使滤布褶皱对齐,打胶头再打下一条胶,采用这种方式进行打胶

一种进出水管打胶装置及其打胶方法.pdf
本发明公开了一种进出水管打胶装置及其打胶方法,其装置包括机架以及设置在机架上的供料单元、打胶单元和控制单元,供料单元包括驱动电机、链轮组件和若干放料工装块,链轮组件包括设置在机架上的主动链轮和从动链轮以及链条,主动链轮与驱动电机的输出轴相连接,若干放料工装块的一端等间隔设置在链条上,若干放料工装块的另一端上开设有供进出水管放置的凹槽;打胶单元包括支架、伸缩气缸、打胶头和气压挤胶罐。本发明中采用设置供料单元和打胶单元的方式,不仅使得进出水管自动供料,还使得在自动供料的同时对进出水管自动进行涂胶,代替了人工涂
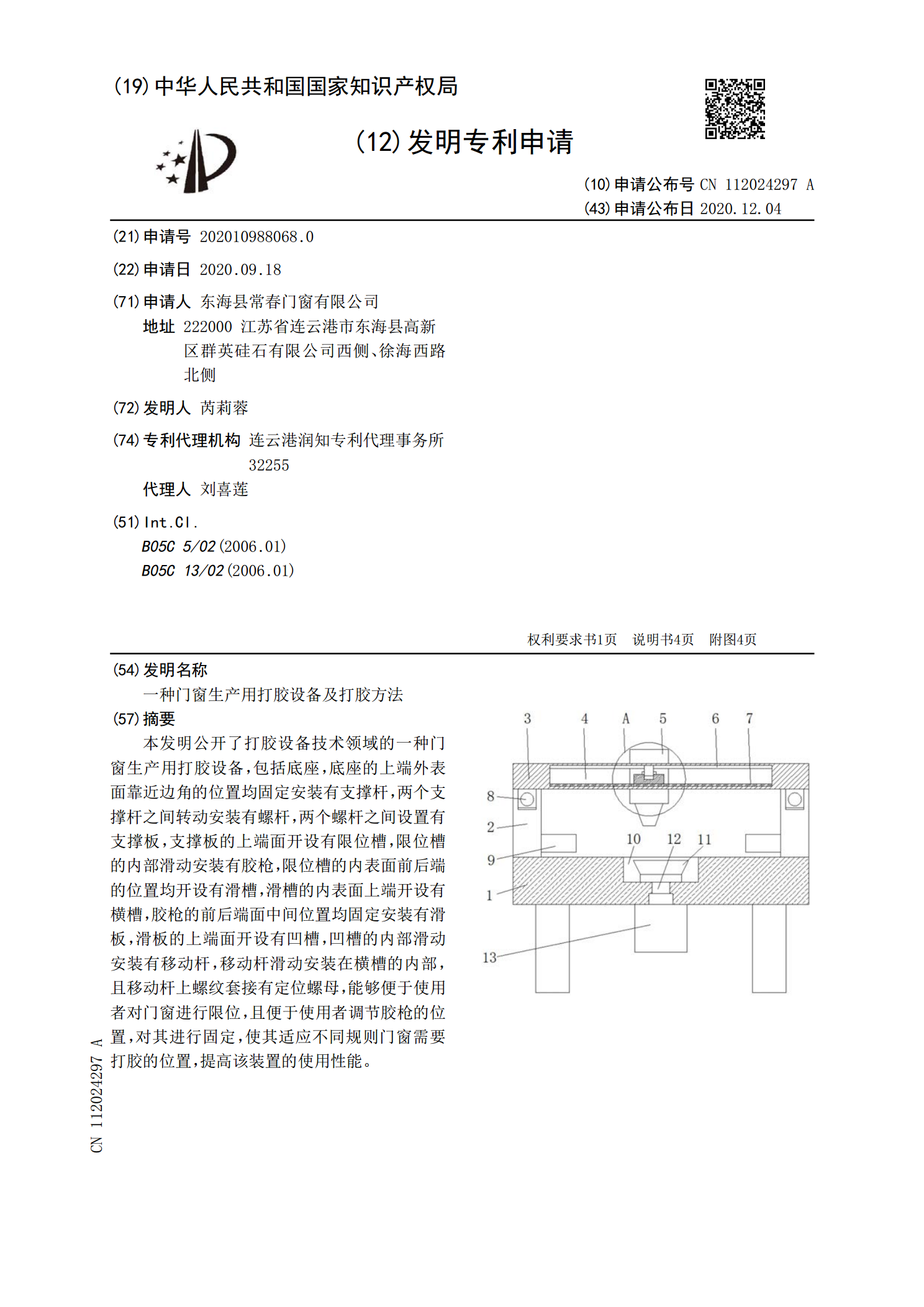
一种门窗生产用打胶设备及打胶方法.pdf
本发明公开了打胶设备技术领域的一种门窗生产用打胶设备,包括底座,底座的上端外表面靠近边角的位置均固定安装有支撑杆,两个支撑杆之间转动安装有螺杆,两个螺杆之间设置有支撑板,支撑板的上端面开设有限位槽,限位槽的内部滑动安装有胶枪,限位槽的内表面前后端的位置均开设有滑槽,滑槽的内表面上端开设有横槽,胶枪的前后端面中间位置均固定安装有滑板,滑板的上端面开设有凹槽,凹槽的内部滑动安装有移动杆,移动杆滑动安装在横槽的内部,且移动杆上螺纹套接有定位螺母,能够便于使用者对门窗进行限位,且便于使用者调节胶枪的位置,对其进行
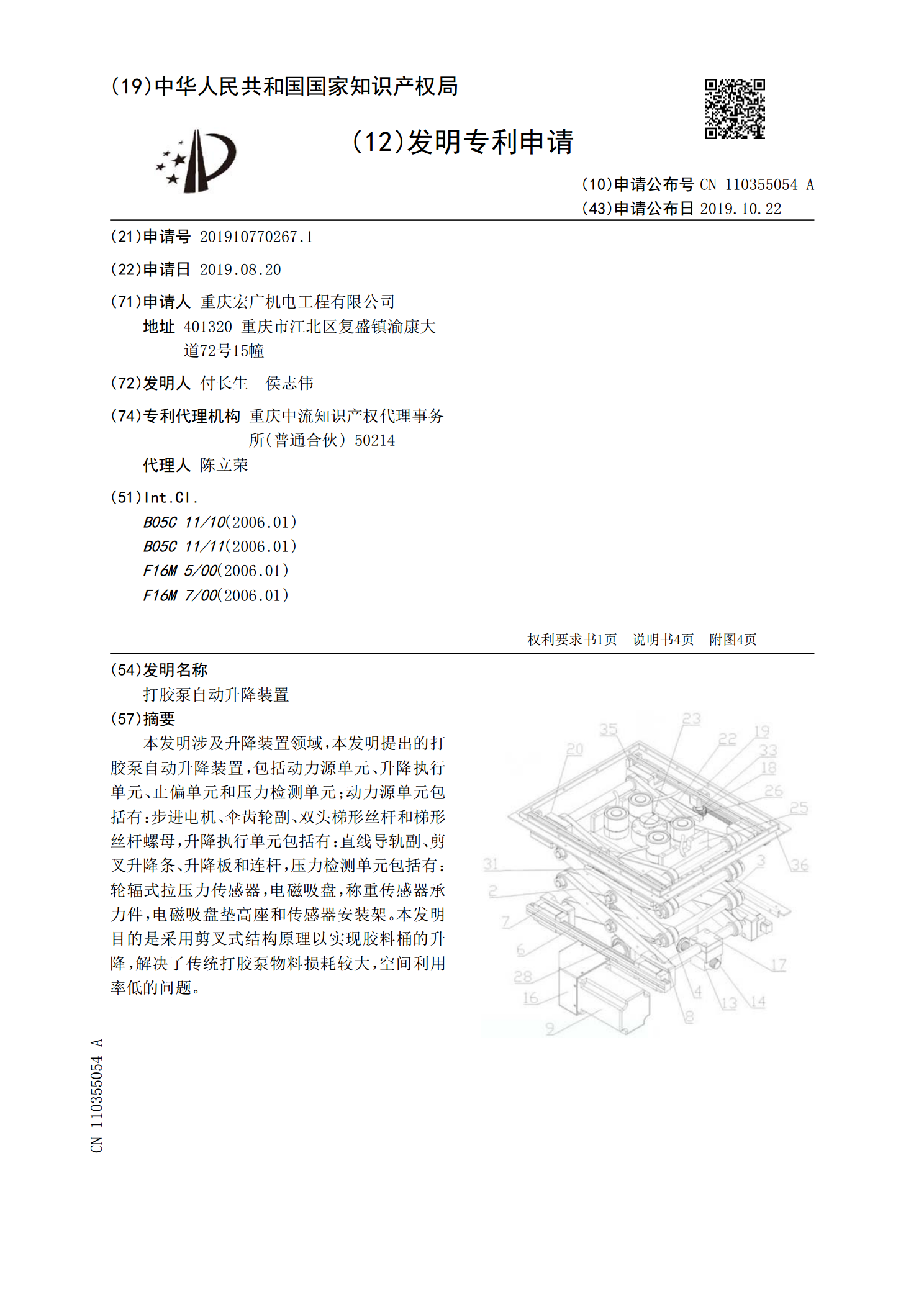
打胶泵自动升降装置.pdf
本发明涉及升降装置领域,本发明提出的打胶泵自动升降装置,包括动力源单元、升降执行单元、止偏单元和压力检测单元;动力源单元包括有:步进电机、伞齿轮副、双头梯形丝杆和梯形丝杆螺母,升降执行单元包括有:直线导轨副、剪叉升降条、升降板和连杆,压力检测单元包括有:轮辐式拉压力传感器,电磁吸盘,称重传感器承力件,电磁吸盘垫高座和传感器安装架。本发明目的是采用剪叉式结构原理以实现胶料桶的升降,解决了传统打胶泵物料损耗较大,空间利用率低的问题。