
一种基于图像识别的火源精准定位方法.pdf

鹏飞****可爱


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于图像识别的火源精准定位方法.pdf
本发明公开了一种基于图像识别的火源精准定位方法,包括以下步骤:智能消防机器人进入到火灾现场后,启动红外火焰传感器、气体烟雾传感器和温湿度传感器,测定火焰指标、烟雾指标以及温湿度指标,智能消防机器人停留在现场一段时间,并持续将数据传送给控制模块,若所有指标都在阈值范围内,则判定无火灾发生,否则,启动智能消防机器人的摄像头,对现场进行视频拍摄,将其设定为疑似火灾区域并标记疑似火灾区域的火源位置,本发明不只是采用传感器进行判断火灾区域,还通过图像识别的方法对火源信息进行再次确认,提高了火源识别的精准度并确定了火
一种基于图像识别的图像定位方法.pdf
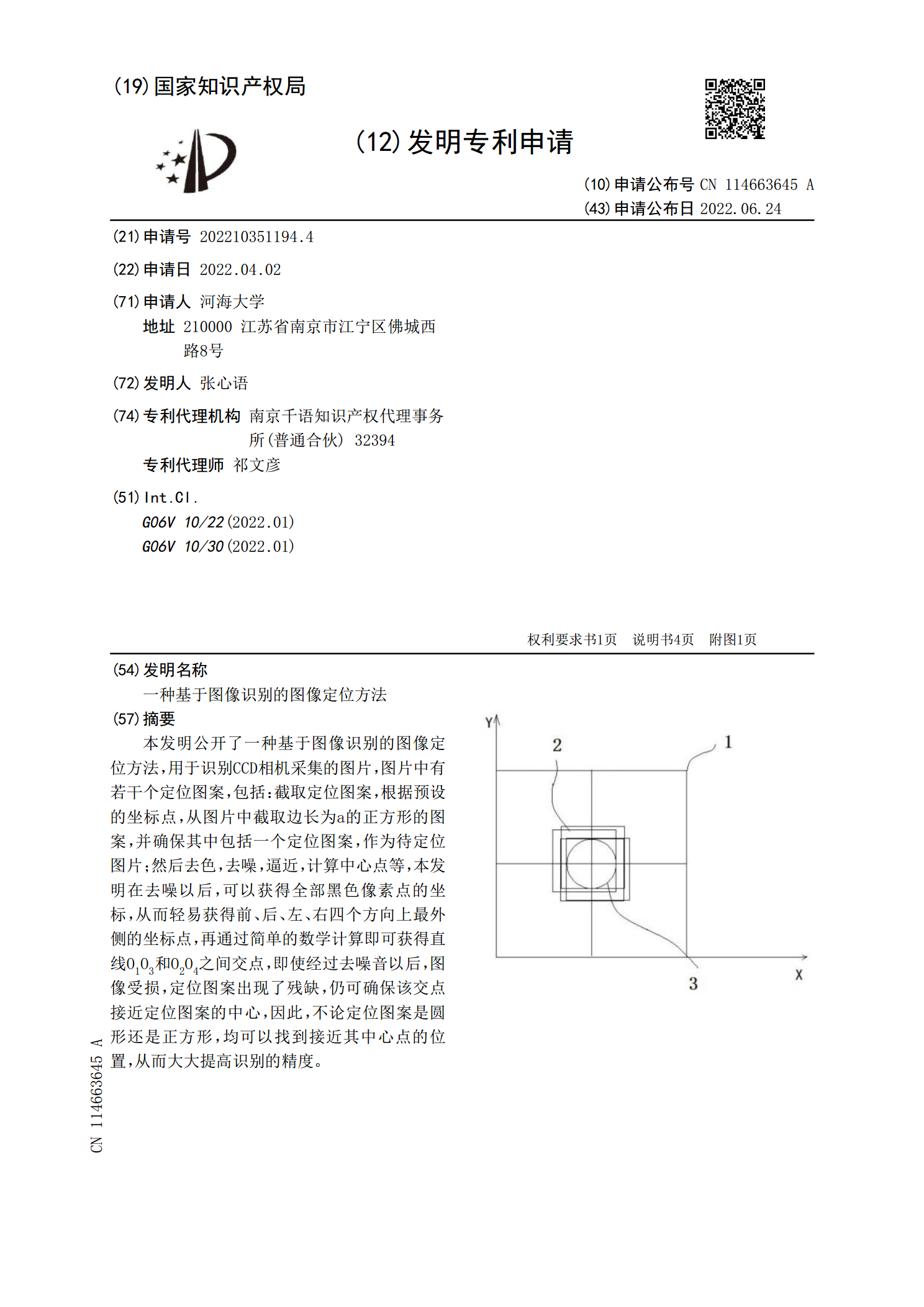
本发明公开了一种基于图像识别的图像定位方法,用于识别CCD相机采集的图片,图片中有若干个定位图案,包括:截取定位图案,根据预设的坐标点,从图片中截取边长为a的正方形的图案,并确保其中包括一个定位图案,作为待定位图片;然后去色,去噪,逼近,计算中心点等,本发明在去噪以后,可以获得全部黑色像素点的坐标,从而轻易获得前、后、左、右四个方向上最外侧的坐标点,再通过简单的数学计算即可获得直线O<base:Sub>1</base:Sub>O<base:Sub>3</base:Sub>和O<base:Sub>2</ba

基于无线传感器网络的火源定位方法研究.docx
基于无线传感器网络的火源定位方法研究无线传感器网络(Wirelesssensornetworks,WSNs)是一种分布式网络,由许多无线传感器节点组成,用于监测和采集环境信息。在现今社会中,随着火灾事故的不断发生,如何快速、准确地定位火源已成为一个非常关键的问题。因此,本文将研究基于无线传感器网络的火源定位方法。首先,我们需要明确传感器节点和无线传感器网络的定义。传感器节点是一种小型电子设备,具有感知和测量环境信息的能力。无线传感器网络则是将许多传感器节点组成的网络,用于收集、处理和传输感知到的信息。在火
一种基于北斗卫星的机车精准定位方法.pdf
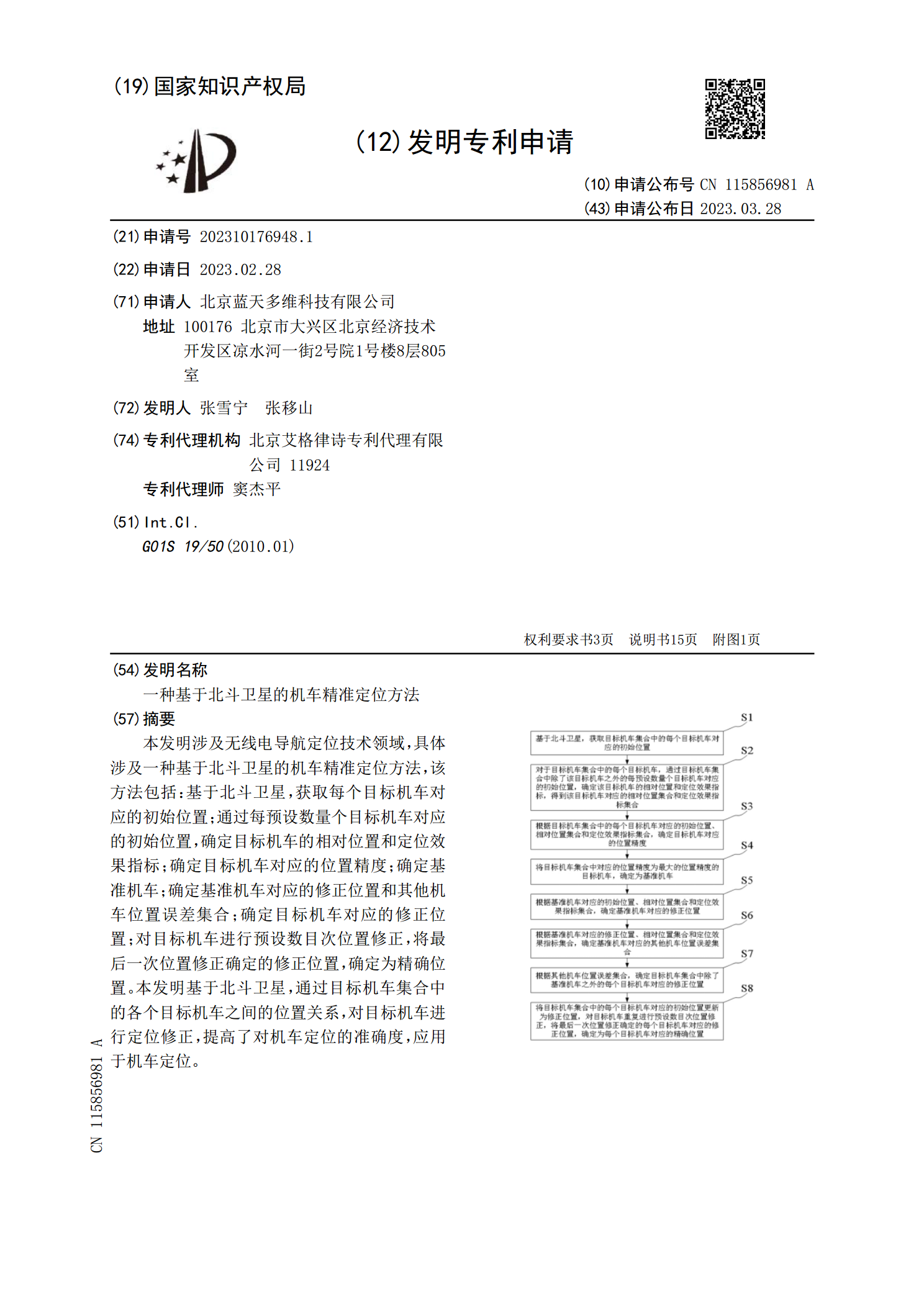
本发明涉及无线电导航定位技术领域,具体涉及一种基于北斗卫星的机车精准定位方法,该方法包括:基于北斗卫星,获取每个目标机车对应的初始位置;通过每预设数量个目标机车对应的初始位置,确定目标机车的相对位置和定位效果指标;确定目标机车对应的位置精度;确定基准机车;确定基准机车对应的修正位置和其他机车位置误差集合;确定目标机车对应的修正位置;对目标机车进行预设数目次位置修正,将最后一次位置修正确定的修正位置,确定为精确位置。本发明基于北斗卫星,通过目标机车集合中的各个目标机车之间的位置关系,对目标机车进行定位修正,
一种基于机器视觉的水稻精准定位方法.pdf
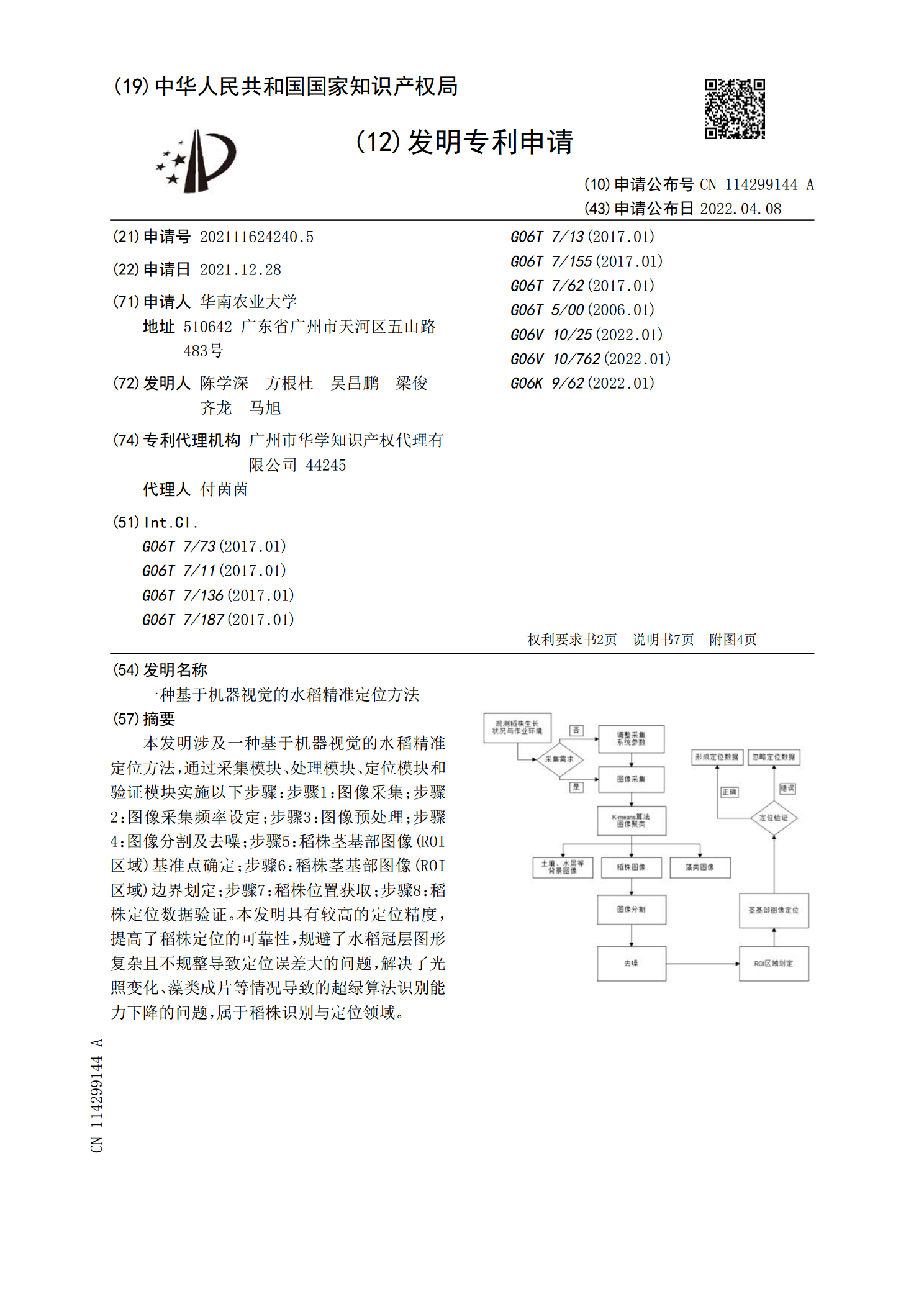
本发明涉及一种基于机器视觉的水稻精准定位方法,通过采集模块、处理模块、定位模块和验证模块实施以下步骤:步骤1:图像采集;步骤2:图像采集频率设定;步骤3:图像预处理;步骤4:图像分割及去噪;步骤5:稻株茎基部图像(ROI区域)基准点确定;步骤6:稻株茎基部图像(ROI区域)边界划定;步骤7:稻株位置获取;步骤8:稻株定位数据验证。本发明具有较高的定位精度,提高了稻株定位的可靠性,规避了水稻冠层图形复杂且不规整导致定位误差大的问题,解决了光照变化、藻类成片等情况导致的超绿算法识别能力下降的问题,属于稻株识别