
基于超声相控阵的摩擦焊焊缝缺陷定量检测方法和系统.pdf

雨巷****珺琦


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于超声相控阵的摩擦焊焊缝缺陷定量检测方法和系统.pdf
本发明公开了基于超声相控阵的搅拌摩擦焊焊缝缺陷定量检测方法和系统,利用超声相控阵仪对焊缝进行S扫描获得S扫描焊缝缺陷图像,对S扫描焊缝缺陷图像划分感兴趣目标区域,分别提取S扫描信号标尺以及S扫描信号图像并转化为灰度图,针对灰度图进行滤波以及二值化处理,提取S扫描信号标尺单位;保留S扫描信号的二值化处理后的图像中上下阈值范围内的点,确定这些点组成的图像的中心X像素坐标、Y像素坐标以及X方向最大像素值,分别将图像中心X像素坐标除以S扫描信号标尺单位,获得缺陷尺寸、缺陷等效长度以及缺陷等效宽度。本发明通过图像处
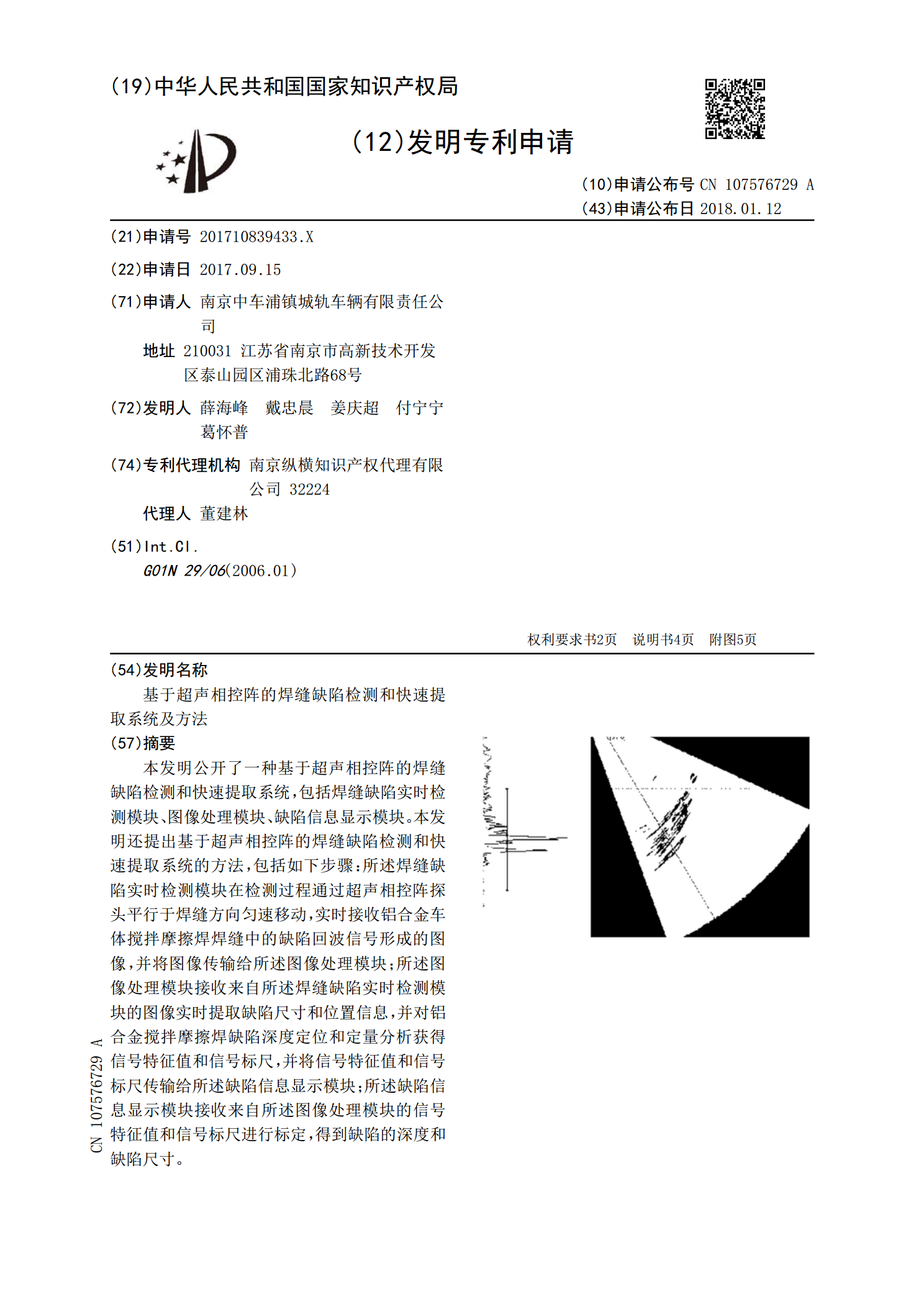
基于超声相控阵的焊缝缺陷检测和快速提取系统及方法.pdf
本发明公开了一种基于超声相控阵的焊缝缺陷检测和快速提取系统,包括焊缝缺陷实时检测模块、图像处理模块、缺陷信息显示模块。本发明还提出基于超声相控阵的焊缝缺陷检测和快速提取系统的方法,包括如下步骤:所述焊缝缺陷实时检测模块在检测过程通过超声相控阵探头平行于焊缝方向匀速移动,实时接收铝合金车体搅拌摩擦焊焊缝中的缺陷回波信号形成的图像,并将图像传输给所述图像处理模块;所述图像处理模块接收来自所述焊缝缺陷实时检测模块的图像实时提取缺陷尺寸和位置信息,并对铝合金搅拌摩擦焊缺陷深度定位和定量分析获得信号特征值和信号标尺
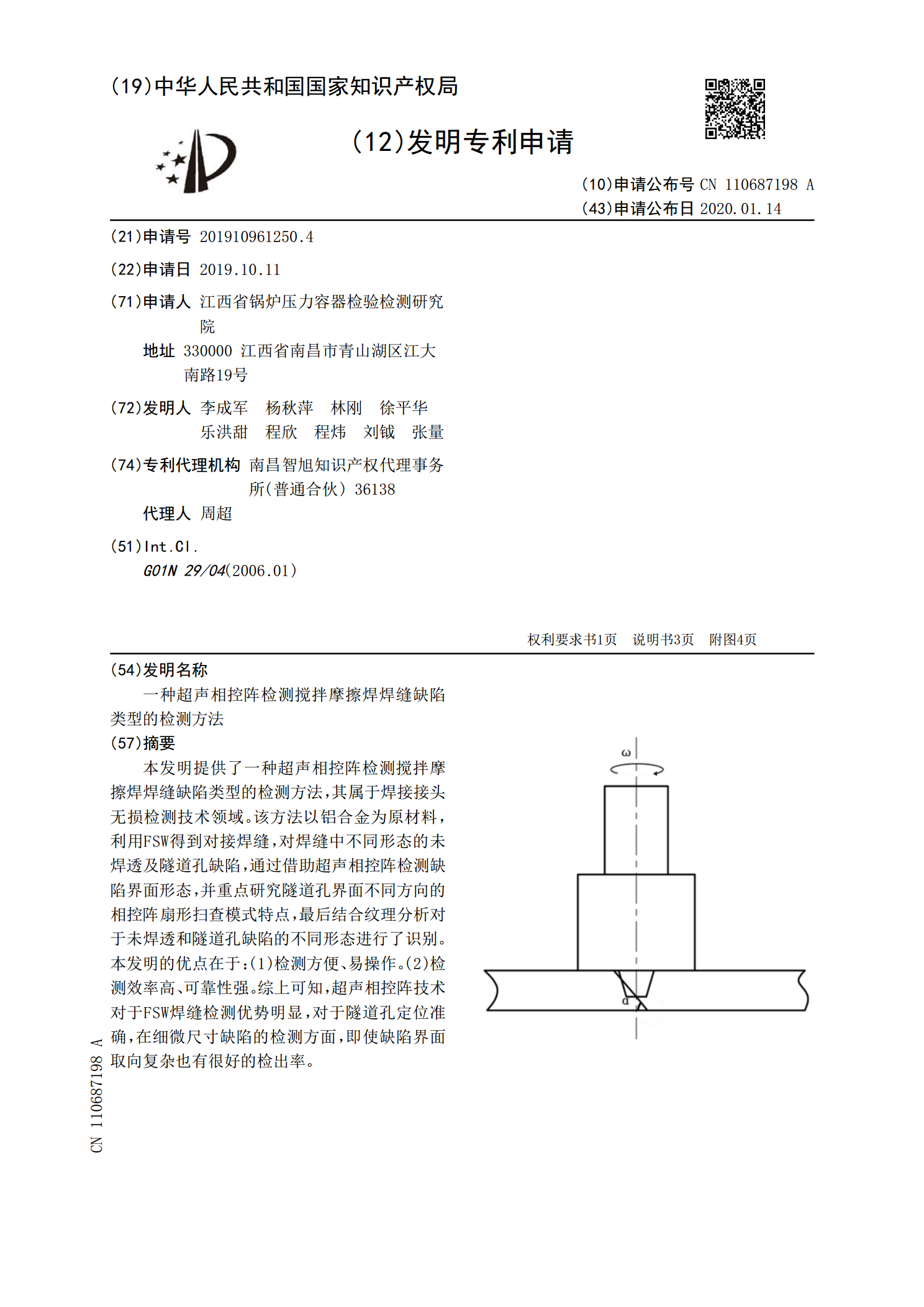
一种超声相控阵检测搅拌摩擦焊焊缝缺陷类型的检测方法.pdf
本发明提供了一种超声相控阵检测搅拌摩擦焊焊缝缺陷类型的检测方法,其属于焊接接头无损检测技术领域。该方法以铝合金为原材料,利用FSW得到对接焊缝,对焊缝中不同形态的未焊透及隧道孔缺陷,通过借助超声相控阵检测缺陷界面形态,并重点研究隧道孔界面不同方向的相控阵扇形扫查模式特点,最后结合纹理分析对于未焊透和隧道孔缺陷的不同形态进行了识别。本发明的优点在于:(1)检测方便、易操作。(2)检测效率高、可靠性强。综上可知,超声相控阵技术对于FSW焊缝检测优势明显,对于隧道孔定位准确,在细微尺寸缺陷的检测方面,即使缺陷界

搅拌摩擦焊焊缝超声TOFD检测与缺陷评估方法.docx
搅拌摩擦焊焊缝超声TOFD检测与缺陷评估方法搅拌摩擦焊是一种新型的焊接技术,通过加热材料并施加外力,使材料摩擦加热并发生塑性变形,最终在材料表面形成焊缝。相比于传统的焊接技术,搅拌摩擦焊具有焊接速度快、焊接强度高、不产生氧化物等优点。然而,搅拌摩擦焊的焊缝质量和完整性检测是实施该技术的关键问题之一。超声TOFD检测是一种常用的无损检测技术,可以完成搅拌摩擦焊的焊缝检测和缺陷评估任务,本文将对这些内容进行更详细的阐述。一、搅拌摩擦焊的基本原理搅拌摩擦焊的基本原理是利用机械摩擦和塑性变形产热,在材料表面形成均
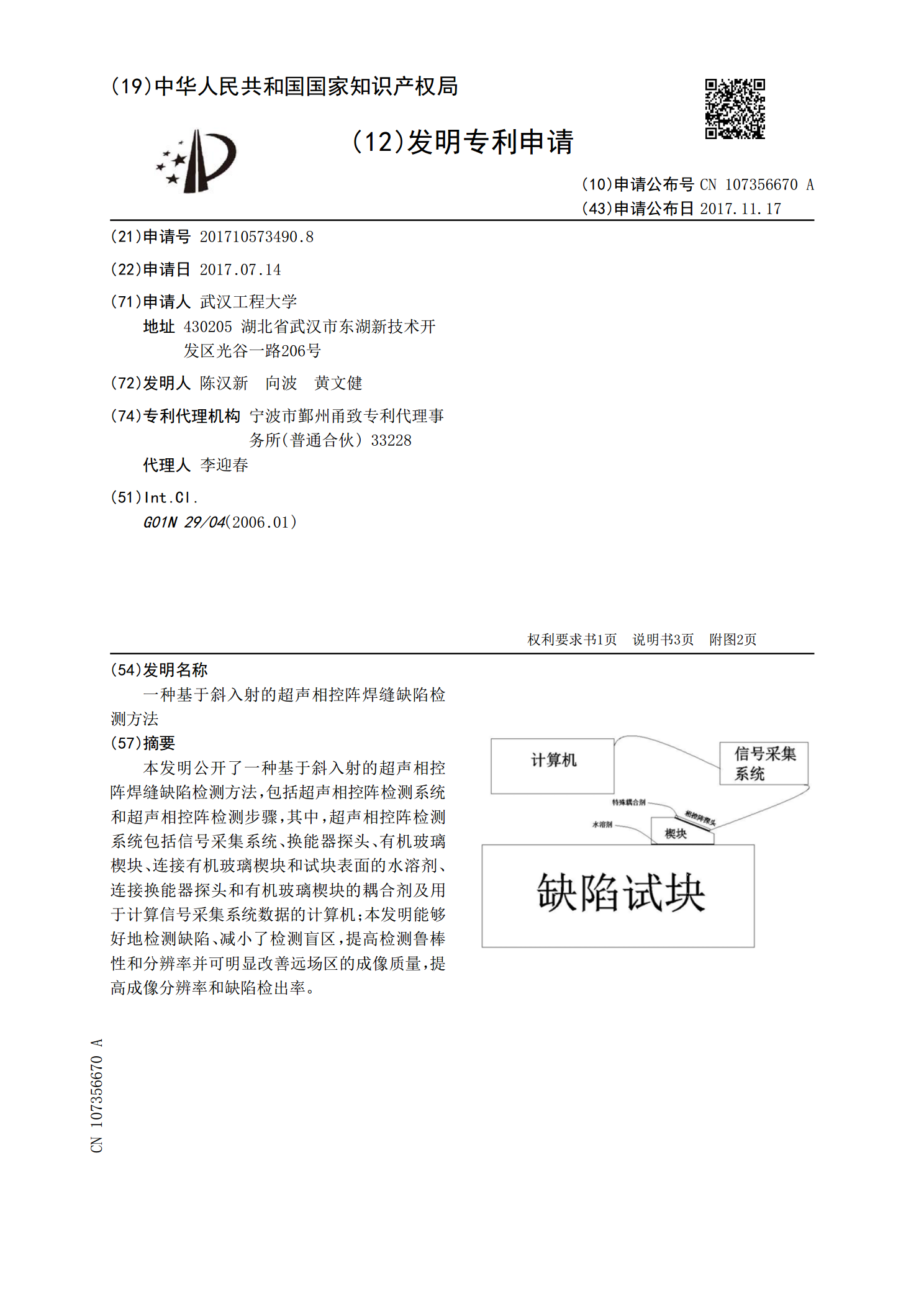
一种基于斜入射的超声相控阵焊缝缺陷检测方法.pdf
本发明公开了一种基于斜入射的超声相控阵焊缝缺陷检测方法,包括超声相控阵检测系统和超声相控阵检测步骤,其中,超声相控阵检测系统包括信号采集系统、换能器探头、有机玻璃楔块、连接有机玻璃楔块和试块表面的水溶剂、连接换能器探头和有机玻璃楔块的耦合剂及用于计算信号采集系统数据的计算机;本发明能够好地检测缺陷、减小了检测盲区,提高检测鲁棒性和分辨率并可明显改善远场区的成像质量,提高成像分辨率和缺陷检出率。