
基于超声相控阵的焊缝缺陷检测和快速提取系统及方法.pdf

是你****晨呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于超声相控阵的焊缝缺陷检测和快速提取系统及方法.pdf
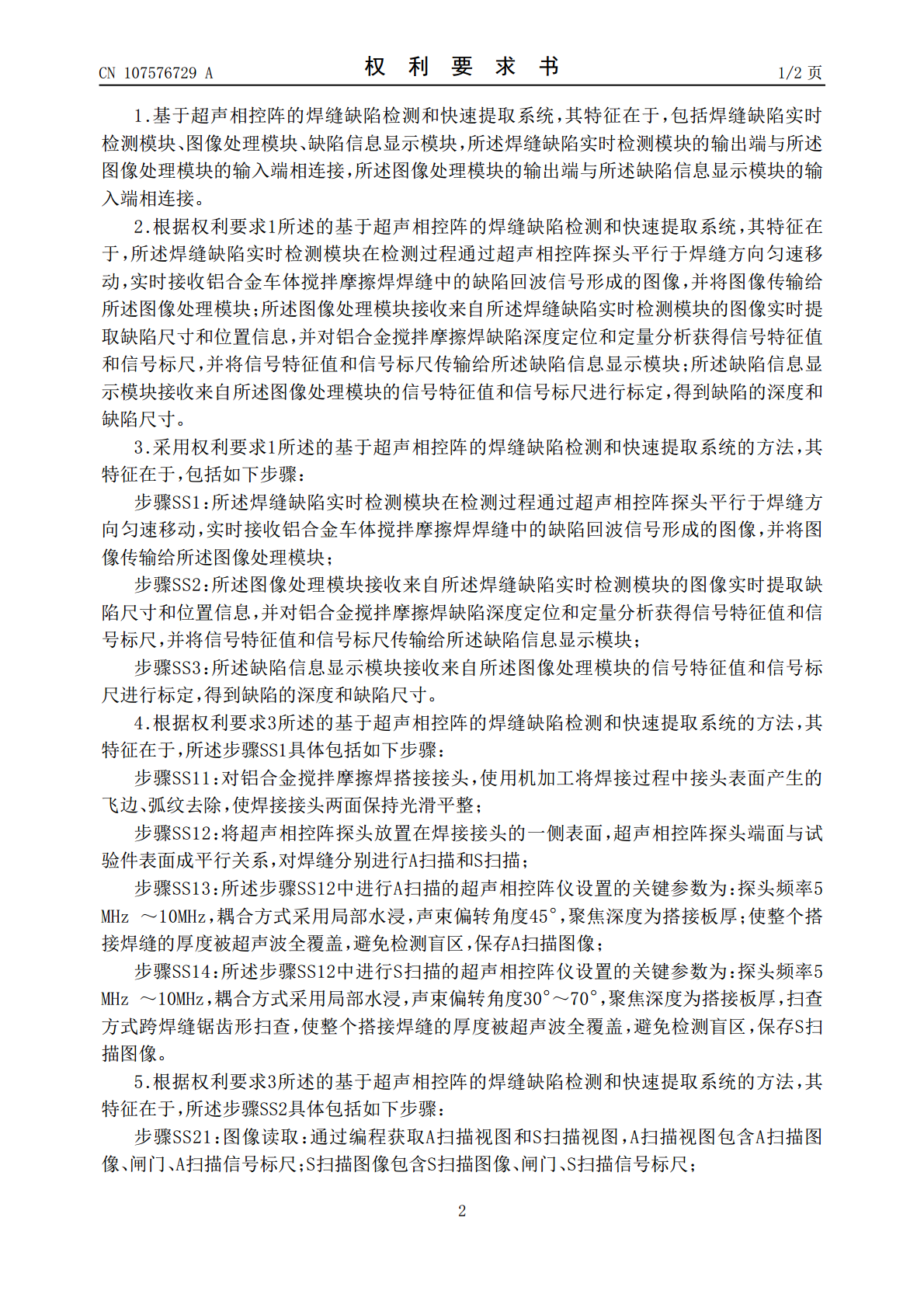
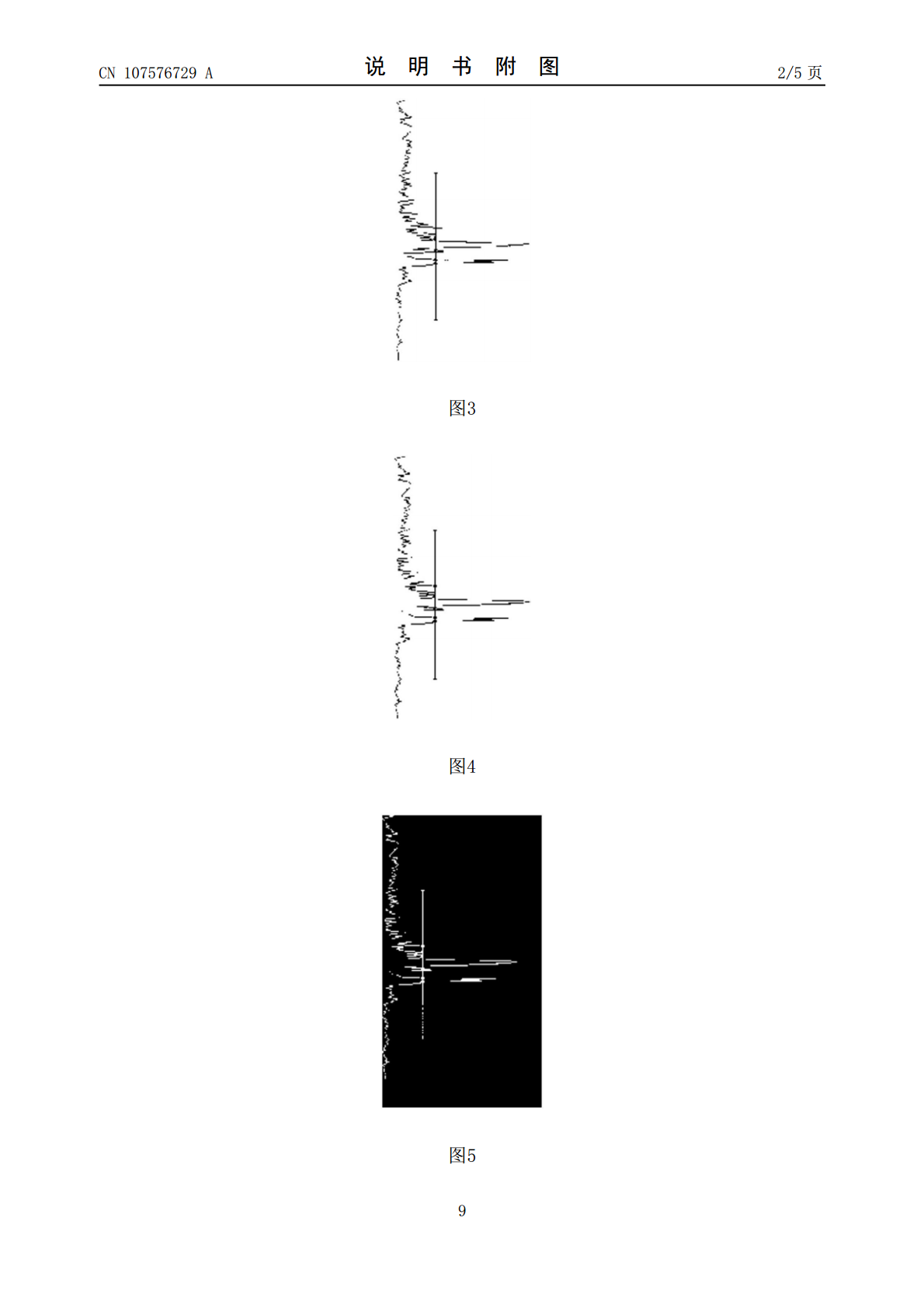
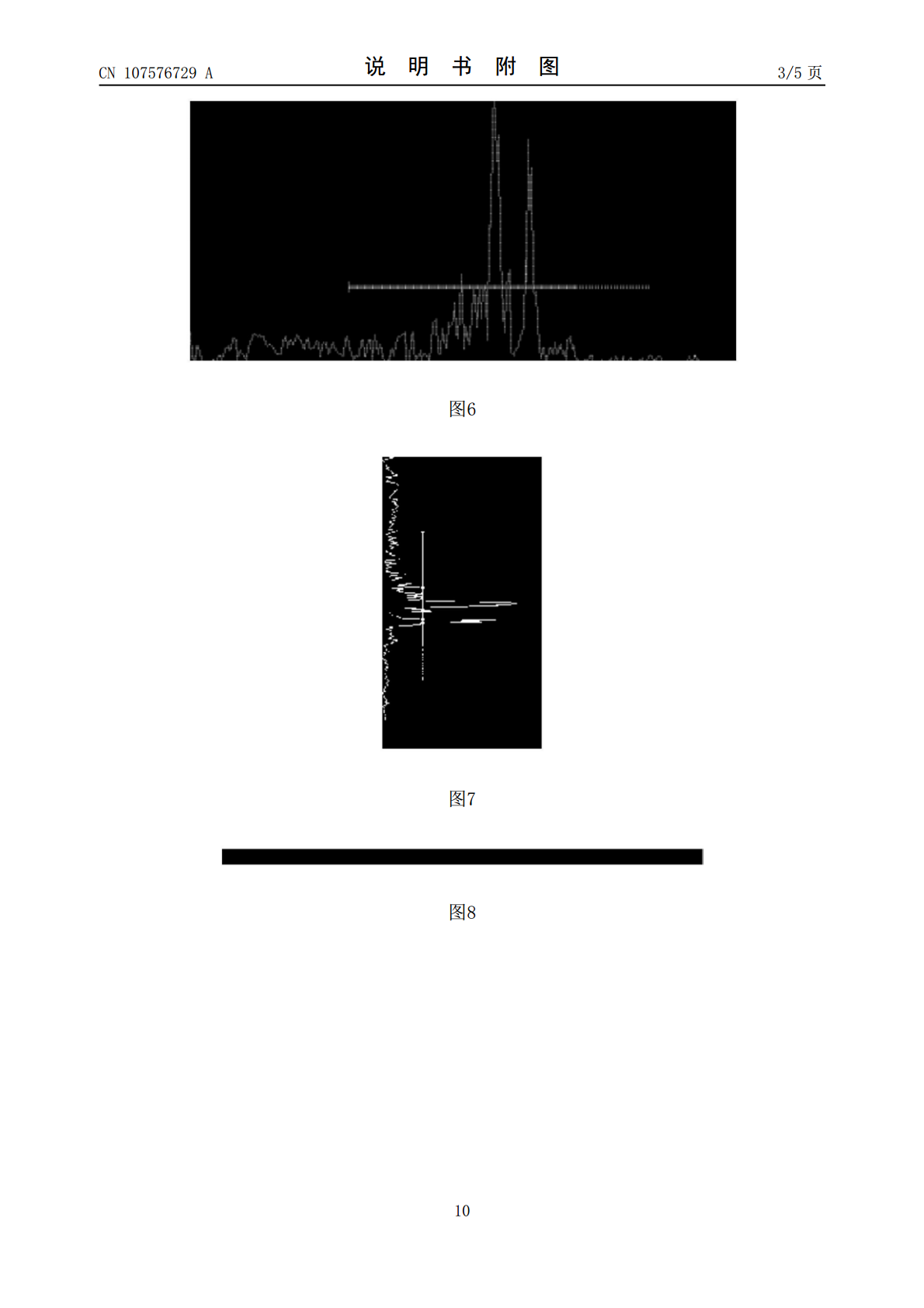
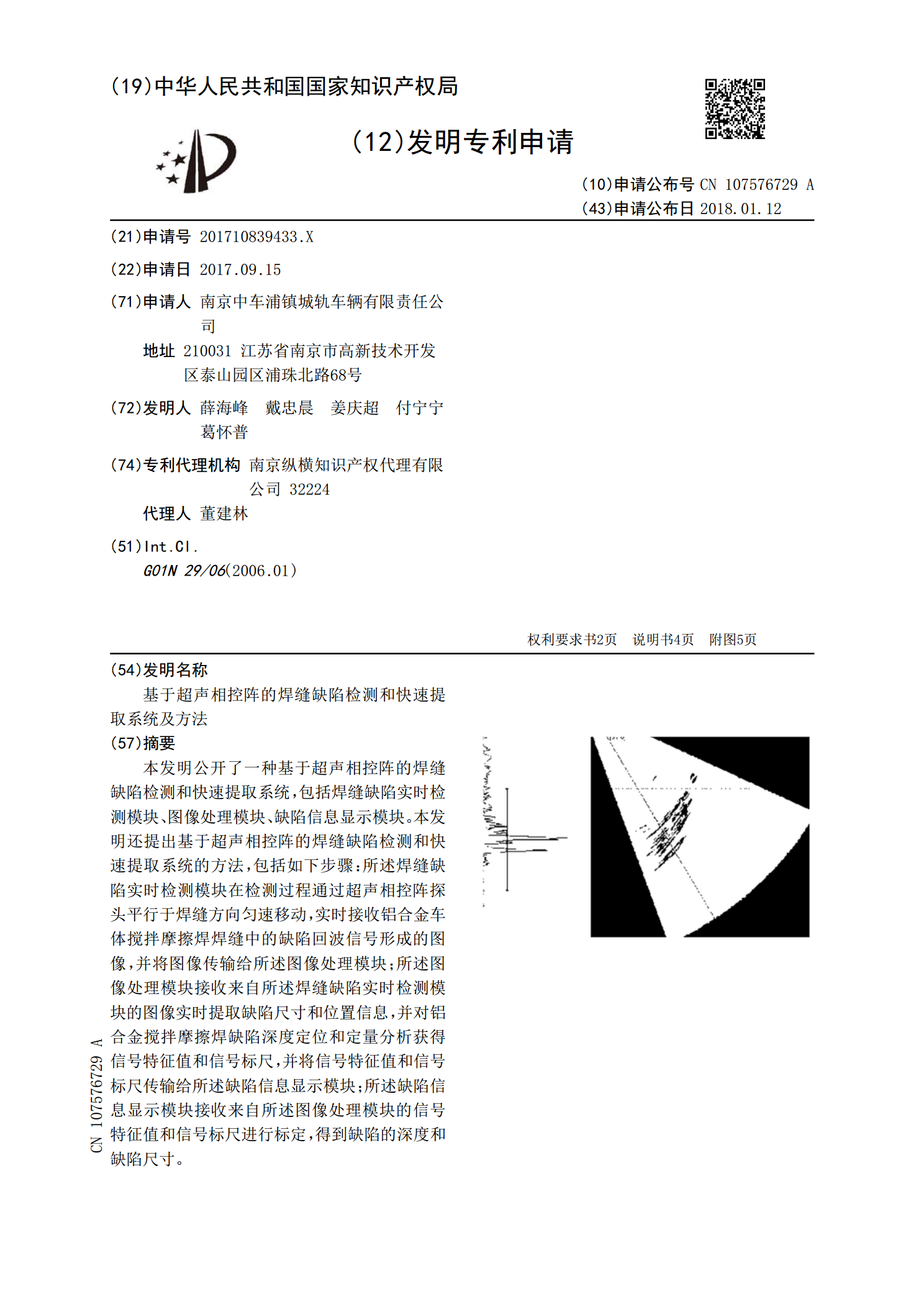
本发明公开了一种基于超声相控阵的焊缝缺陷检测和快速提取系统,包括焊缝缺陷实时检测模块、图像处理模块、缺陷信息显示模块。本发明还提出基于超声相控阵的焊缝缺陷检测和快速提取系统的方法,包括如下步骤:所述焊缝缺陷实时检测模块在检测过程通过超声相控阵探头平行于焊缝方向匀速移动,实时接收铝合金车体搅拌摩擦焊焊缝中的缺陷回波信号形成的图像,并将图像传输给所述图像处理模块;所述图像处理模块接收来自所述焊缝缺陷实时检测模块的图像实时提取缺陷尺寸和位置信息,并对铝合金搅拌摩擦焊缺陷深度定位和定量分析获得信号特征值和信号标尺

基于超声相控阵的摩擦焊焊缝缺陷定量检测方法和系统.pdf
本发明公开了基于超声相控阵的搅拌摩擦焊焊缝缺陷定量检测方法和系统,利用超声相控阵仪对焊缝进行S扫描获得S扫描焊缝缺陷图像,对S扫描焊缝缺陷图像划分感兴趣目标区域,分别提取S扫描信号标尺以及S扫描信号图像并转化为灰度图,针对灰度图进行滤波以及二值化处理,提取S扫描信号标尺单位;保留S扫描信号的二值化处理后的图像中上下阈值范围内的点,确定这些点组成的图像的中心X像素坐标、Y像素坐标以及X方向最大像素值,分别将图像中心X像素坐标除以S扫描信号标尺单位,获得缺陷尺寸、缺陷等效长度以及缺陷等效宽度。本发明通过图像处
一种基于斜入射的超声相控阵焊缝缺陷检测方法.pdf
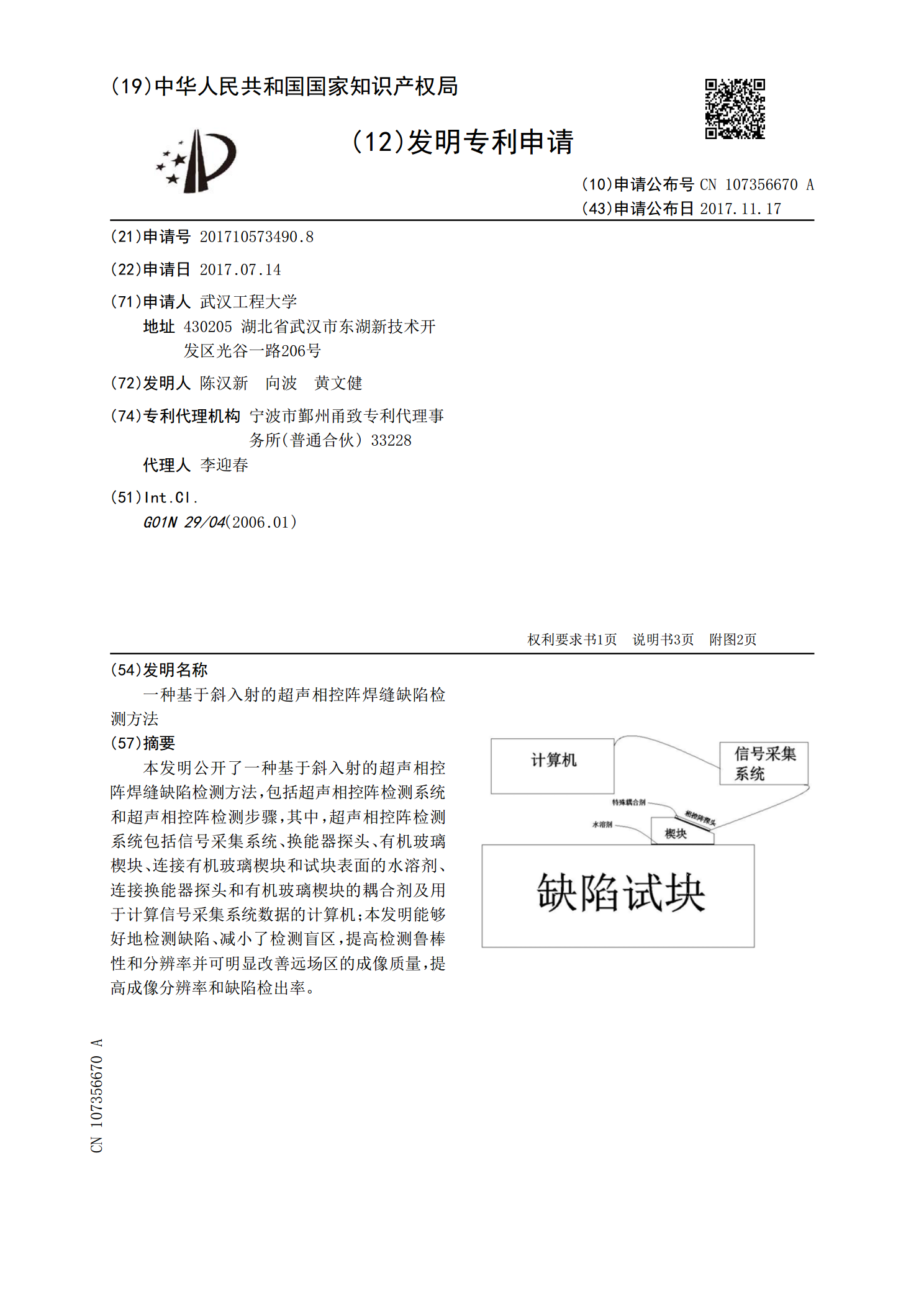
本发明公开了一种基于斜入射的超声相控阵焊缝缺陷检测方法,包括超声相控阵检测系统和超声相控阵检测步骤,其中,超声相控阵检测系统包括信号采集系统、换能器探头、有机玻璃楔块、连接有机玻璃楔块和试块表面的水溶剂、连接换能器探头和有机玻璃楔块的耦合剂及用于计算信号采集系统数据的计算机;本发明能够好地检测缺陷、减小了检测盲区,提高检测鲁棒性和分辨率并可明显改善远场区的成像质量,提高成像分辨率和缺陷检出率。

缺陷焊缝超声相控阵检测实验研究.pptx
汇报人:目录PARTONEPARTTWO研究缺陷焊缝超声相控阵检测技术评估超声相控阵检测技术在缺陷焊缝检测中的准确性和可靠性探究超声相控阵检测技术在不同焊缝条件下的适用性PARTTHREE实验设备与材料实验步骤与操作流程数据采集与处理方法实验参数设置与调整PARTFOUR实验结果呈现结果分析方法实验结果与预期结果的比较分析实验结果在不同焊缝条件下的适用性分析PARTFIVE结论总结技术应用前景分析对未来研究的建议与展望对实际应用的指导意义与价值THANKYOU

电子束焊缝的超声相控阵快速扫查装置和检测方法.pdf
本发明属于无损检测领域,涉及一种电子束焊缝的超声相控阵快速扫查装置和检测方法。本发明提出了一种电子束焊缝的超声相控阵快速扫查装置和检测方法,利用滚轮式编码器检测并传输相控阵探头的位置信息,实现相控阵的电子扫查,将二维扫查简化为一维扫查,大大提高检测效率;另一方面,通过控制不同组晶片的延时法则,控制声束形状,实现焊缝全厚度动态聚焦,避免了频繁更换探头;同时,采用接触法检测方法,避免了水浸或喷水扫查设备的使用,缩减了设备整体体积,使整套装置便于携带,方便进行外场检测。本发明的一个实施例,经实际检测证明,检测效