
钢板自动取样方法及钢板自动取样系统.pdf

努力****绮亦


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

钢板自动取样方法及钢板自动取样系统.pdf
本发明提供了一种钢板自动取样方法及钢板自动取样系统。所述钢板自动取样方法,包括:通过机械臂带动设于机械臂末端的夹具将工件从上料工位搬运至切割台,并通过设于所述机械臂末端的工业相机获取对应工件上的信息码,根据所述信息码图像分析获得所述工件的样件信息,所述样件信息包括:样件形状尺寸;根据所述样件形状尺寸,通过设于所述切割台上的切割机构对工件进行切割,切割出的样件掉落至样件运输机构,形成的废料留在所述切割台上;通过所述机械臂带动所述夹具将废料从切割台搬运至废料运输机构。本发明通过信息码识别获得与工件对应的样件信
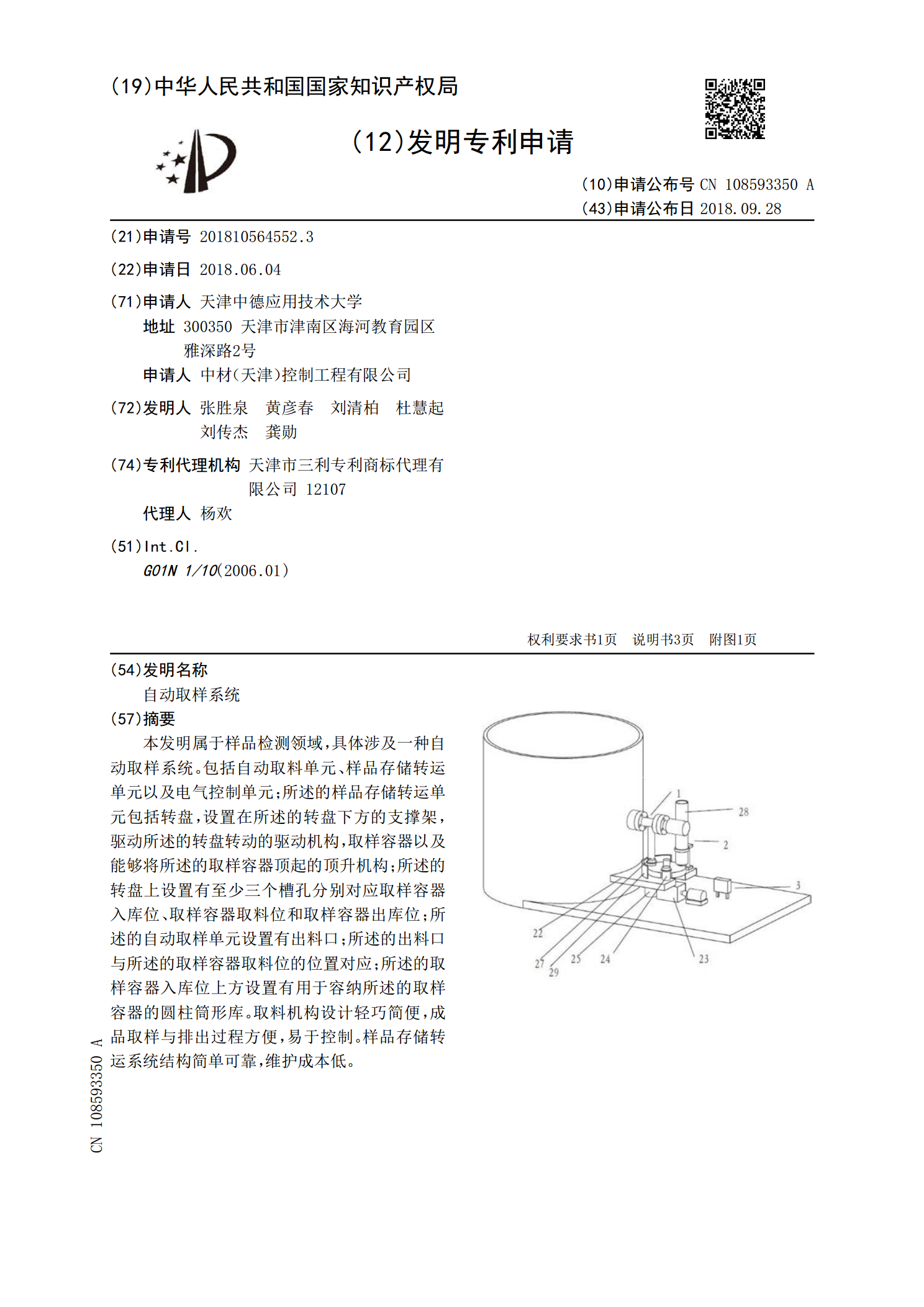
自动取样系统.pdf
本发明属于样品检测领域,具体涉及一种自动取样系统。包括自动取料单元、样品存储转运单元以及电气控制单元;所述的样品存储转运单元包括转盘,设置在所述的转盘下方的支撑架,驱动所述的转盘转动的驱动机构,取样容器以及能够将所述的取样容器顶起的顶升机构;所述的转盘上设置有至少三个槽孔分别对应取样容器入库位、取样容器取料位和取样容器出库位;所述的自动取样单元设置有出料口;所述的出料口与所述的取样容器取料位的位置对应;所述的取样容器入库位上方设置有用于容纳所述的取样容器的圆柱筒形库。取料机构设计轻巧简便,成品取样与排出过

一种自动取样器及自动取样方法.pdf
本发明公开了一种自动取样器及方法,所述自动取样器包括取样瓶和托盘,所述自动取样器内设有动力装置、设置在动力装置上的主动轴和可夹取并垂直翻转取样瓶的夹持装置,所述夹持装置活动连接在所述主动轴上,并可在动力装置和主动轴的作用下进行上下移动,所述夹持装置下方设有可插入取样瓶的插针,所述插针内部为中空结构,所述插针底部设有两条管道,一条连接有进水装置,一条连接有出水装置,所述出水装置上安装有真空发生器;所述自动取样器还设有控制模块。能够自动取样,并能保证取样水的浓度,同时能对取样量和取样时间进行精确的控制;并可通
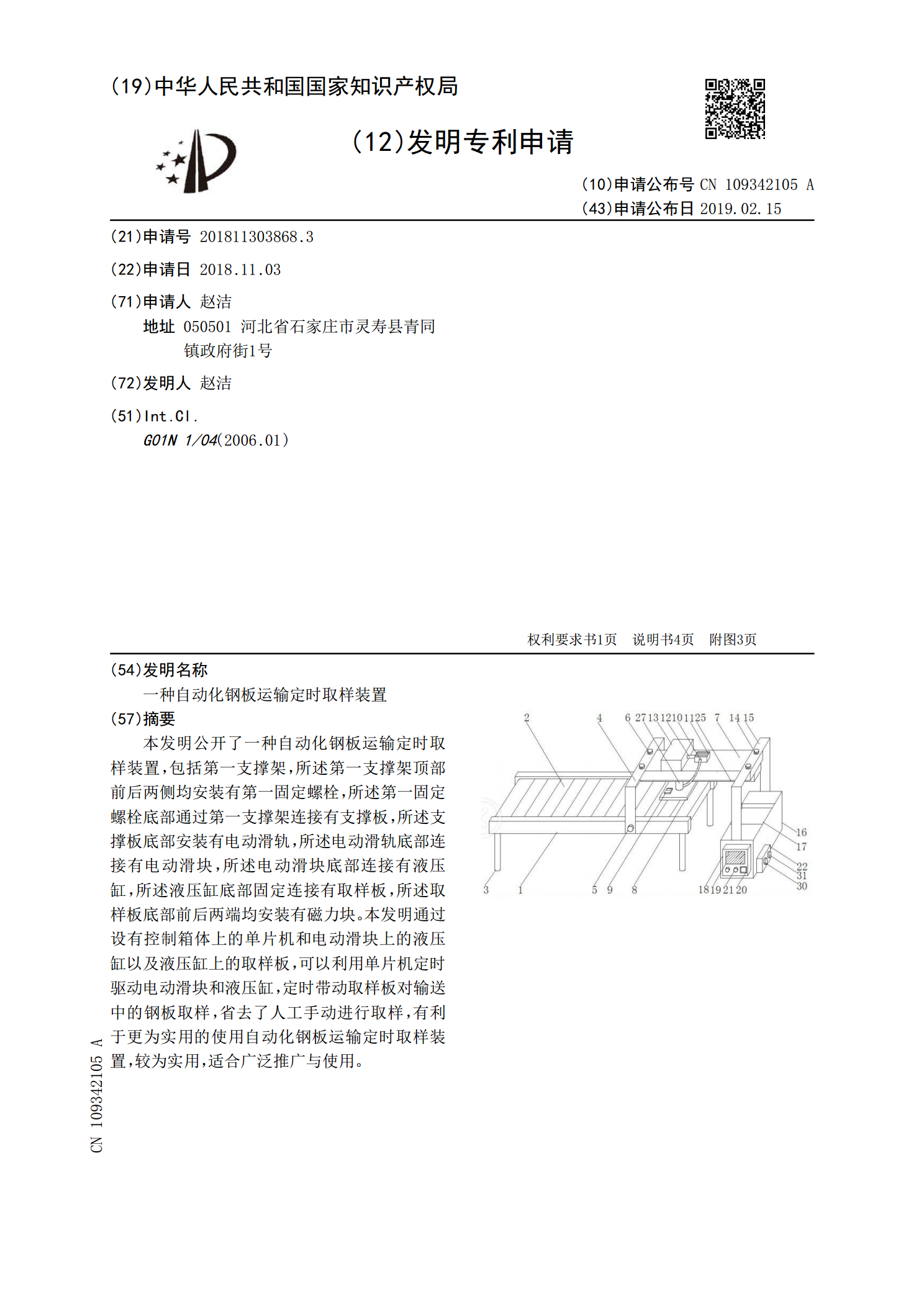
一种自动化钢板运输定时取样装置.pdf
本发明公开了一种自动化钢板运输定时取样装置,包括第一支撑架,所述第一支撑架顶部前后两侧均安装有第一固定螺栓,所述第一固定螺栓底部通过第一支撑架连接有支撑板,所述支撑板底部安装有电动滑轨,所述电动滑轨底部连接有电动滑块,所述电动滑块底部连接有液压缸,所述液压缸底部固定连接有取样板,所述取样板底部前后两端均安装有磁力块。本发明通过设有控制箱体上的单片机和电动滑块上的液压缸以及液压缸上的取样板,可以利用单片机定时驱动电动滑块和液压缸,定时带动取样板对输送中的钢板取样,省去了人工手动进行取样,有利于更为实用的使用

粉末物料自动取样系统.pdf
本发明属于样品检测领域,具体涉及一种粉末物料自动取样系统。包括自动取料单元、样品存储转运单元、卡持单元、无人机以及电气控制单元;所述的样品存储转运单元包括转盘,设置在所述的转盘下方的支撑架,驱动所述的转盘转动的驱动机构,取样容器以及能够将所述的取样容器顶起的顶升机构;所述的转盘上设置有至少三个槽孔分别对应取样容器入库位、取样容器取料位和取样容器出库位;取料机构设计轻巧简便,成品取样与排出过程方便,易于控制。样品存储转运系统结构简单可靠,维护成本低;整个装置因而实现了取样过程的智能化,比原有取样器效率更高,