
基于船端融合数据的智能船舶协同避碰系统和方法.pdf

飞飙****ng


1/10
2/10

3/10
4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于船端融合数据的智能船舶协同避碰系统和方法.pdf
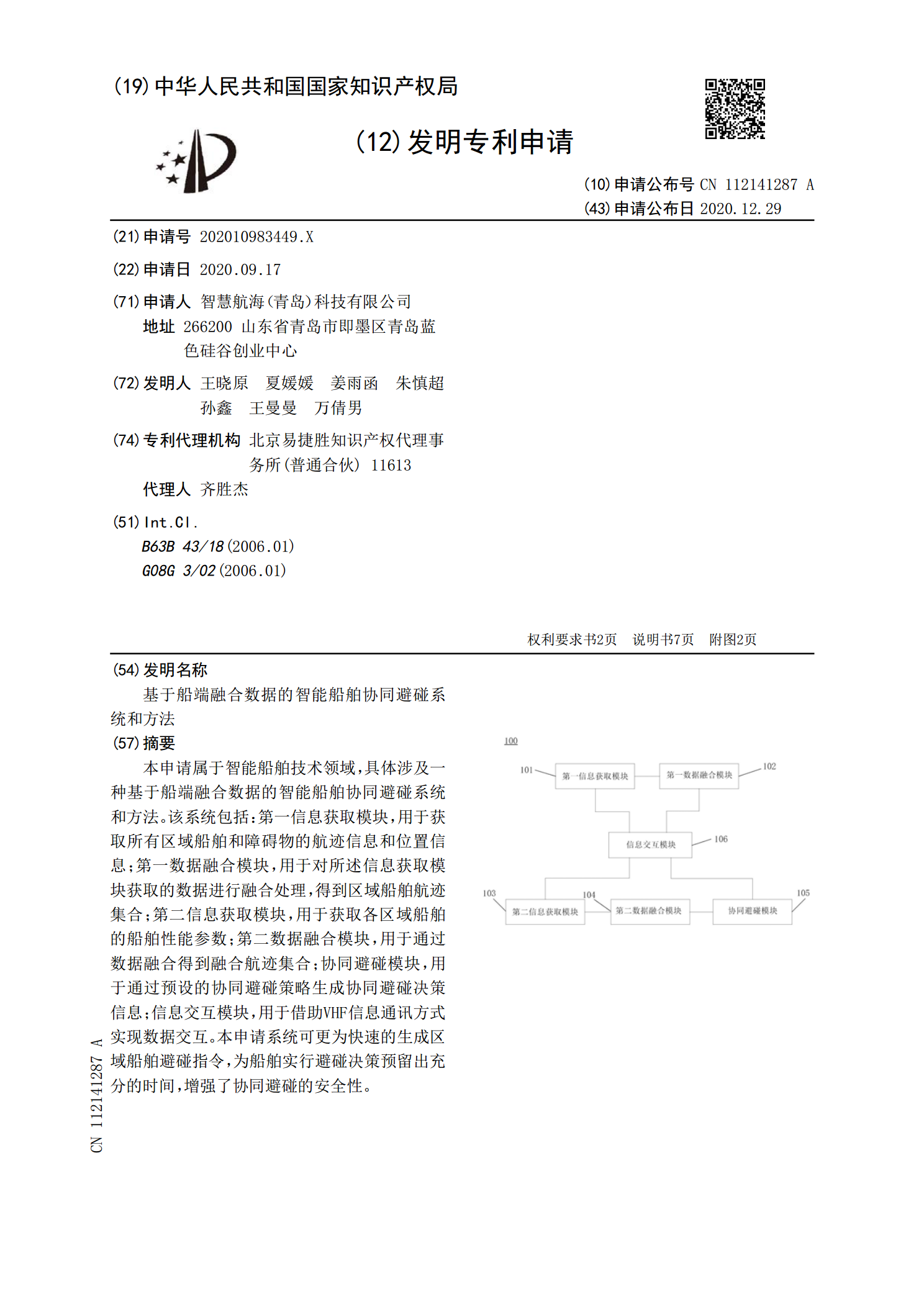
本申请属于智能船舶技术领域,具体涉及一种基于船端融合数据的智能船舶协同避碰系统和方法。该系统包括:第一信息获取模块,用于获取所有区域船舶和障碍物的航迹信息和位置信息;第一数据融合模块,用于对所述信息获取模块获取的数据进行融合处理,得到区域船舶航迹集合;第二信息获取模块,用于获取各区域船舶的船舶性能参数;第二数据融合模块,用于通过数据融合得到融合航迹集合;协同避碰模块,用于通过预设的协同避碰策略生成协同避碰决策信息;信息交互模块,用于借助VHF信息通讯方式实现数据交互。本申请系统可更为快速的生成区域船舶避碰

基于船舶避碰的数据融合方法研究的开题报告.docx
基于船舶避碰的数据融合方法研究的开题报告一、研究背景及意义船舶避碰是航行过程中最重要的安全行为之一,也是船舶操作人员必备的技能之一。现有的船舶避碰方法大多基于雷达等自动化设备,但由于人工选择的干预,往往难以克服避碰中存在的风险和误差。因此,开发一种基于数据融合的船舶避碰方法,将自动化设备、机器学习和人工决策相结合,有望进一步提升船舶避碰的安全性和效率。二、研究目的和内容本研究旨在探讨一种基于数据融合的船舶避碰方法,旨在将多种数据来源(雷达、GPS等)相互融合,并通过机器学习技术匹配、分类和识别来确定目标船

基于多智能体深度强化学习的船舶协同避碰策略.docx
基于多智能体深度强化学习的船舶协同避碰策略摘要:船舶协同避碰是航行安全的重要问题。传统的协同避碰策略主要基于规则和经验,缺乏适应性和灵活性。近年来,多智能体深度强化学习在解决协同决策问题方面取得了显著进展。本文提出了一种基于多智能体深度强化学习的船舶协同避碰策略,并进行了仿真实验验证。结果表明,该策略在不同环境下能够有效避免碰撞。引言:船舶协同避碰是保证航行安全的重要问题。传统的协同避碰策略主要基于人工设计的规则和经验,受限于船舶操作员的认知和判断能力,无法适应复杂多变的海洋环境。多智能体深度强化学习是一

基于系统集成及避碰技术的船舶智能化.pptx
基于系统集成及避碰技术的船舶智能化目录添加目录项标题系统集成技术船舶智能化概述系统集成技术的定义与作用系统集成技术在船舶智能化中的应用系统集成技术的发展趋势避碰技术船舶避碰技术概述避碰技术的分类与原理避碰技术在船舶智能化中的应用避碰技术的发展趋势船舶智能化技术船舶智能化技术概述船舶智能化技术的实现方式船舶智能化技术的应用场景船舶智能化技术的发展趋势系统集成及避碰技术在船舶智能化的应用案例应用案例一:智能航行系统集成与避碰技术的应用应用案例二:船舶交通管理系统集成与避碰技术的应用应用案例三:无人船系统集成与

基于避碰重点船算法的多船避碰模拟.docx
基于避碰重点船算法的多船避碰模拟多船避碰问题一直是海洋交通中的重要问题,特别是在繁忙的海上交通中。为了保证航行安全,避免船只碰撞,需要开发出能够有效避免船只碰撞的算法。本论文基于避碰重点船算法,研究多船避碰问题,并在此基础上进行多船避碰模拟。首先,对于多船避碰问题,需要明确若干关键概念,如避碰区域、避碰距离、避碰角度、避碰重点船等。避碰区域是指船只的行动区域,在该区域内不能发生碰撞。避碰距离是指船只之间的最短距离,一旦距离小于该值就会发生碰撞。避碰角度是指与前方船只的夹角,如果对面的船只在其左侧,则此船只