
基于船舶避碰的数据融合方法研究的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于船舶避碰的数据融合方法研究的开题报告.docx
基于船舶避碰的数据融合方法研究的开题报告一、研究背景及意义船舶避碰是航行过程中最重要的安全行为之一,也是船舶操作人员必备的技能之一。现有的船舶避碰方法大多基于雷达等自动化设备,但由于人工选择的干预,往往难以克服避碰中存在的风险和误差。因此,开发一种基于数据融合的船舶避碰方法,将自动化设备、机器学习和人工决策相结合,有望进一步提升船舶避碰的安全性和效率。二、研究目的和内容本研究旨在探讨一种基于数据融合的船舶避碰方法,旨在将多种数据来源(雷达、GPS等)相互融合,并通过机器学习技术匹配、分类和识别来确定目标船
基于船端融合数据的智能船舶协同避碰系统和方法.pdf
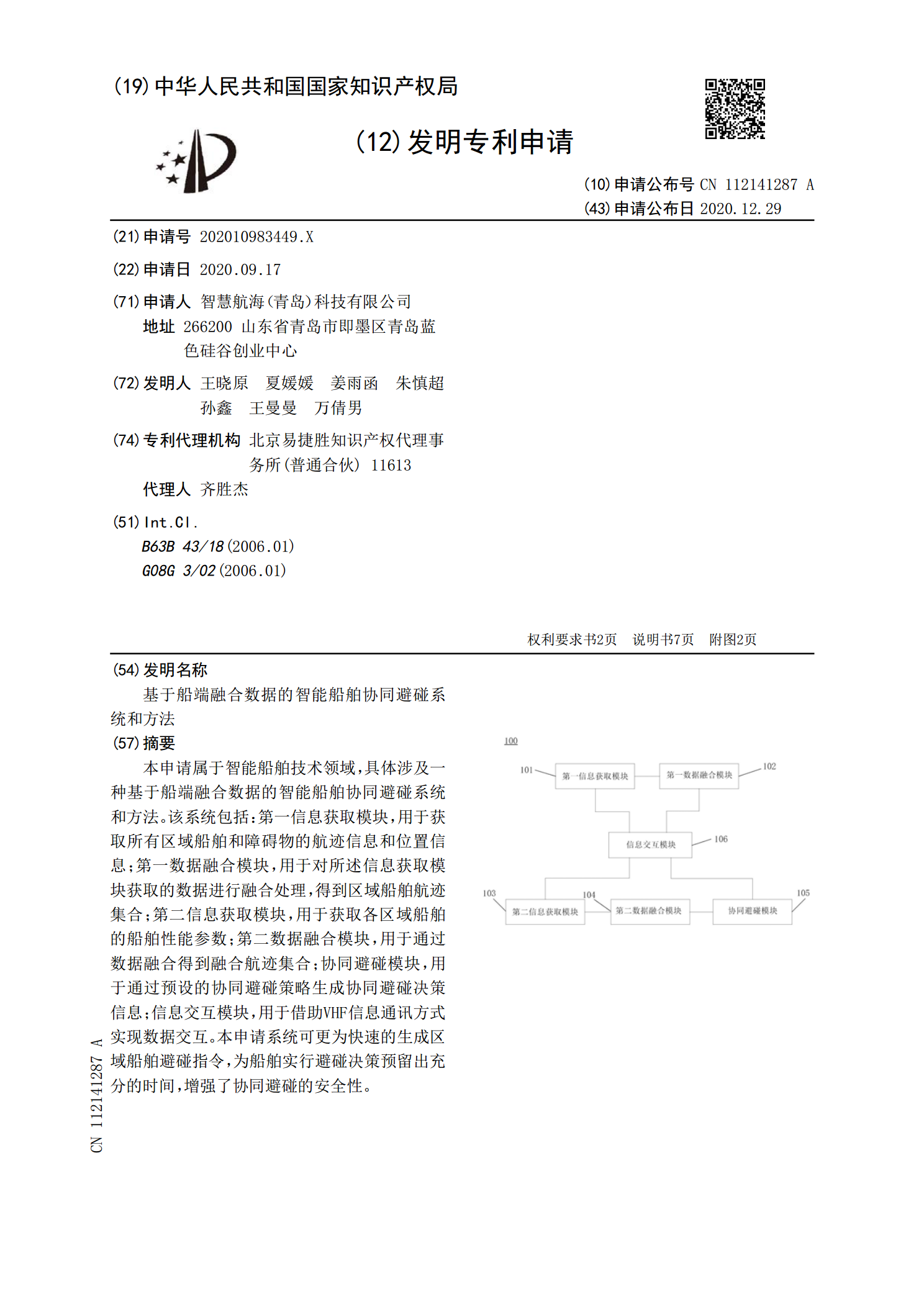
本申请属于智能船舶技术领域,具体涉及一种基于船端融合数据的智能船舶协同避碰系统和方法。该系统包括:第一信息获取模块,用于获取所有区域船舶和障碍物的航迹信息和位置信息;第一数据融合模块,用于对所述信息获取模块获取的数据进行融合处理,得到区域船舶航迹集合;第二信息获取模块,用于获取各区域船舶的船舶性能参数;第二数据融合模块,用于通过数据融合得到融合航迹集合;协同避碰模块,用于通过预设的协同避碰策略生成协同避碰决策信息;信息交互模块,用于借助VHF信息通讯方式实现数据交互。本申请系统可更为快速的生成区域船舶避碰

多目标下的船舶智能避碰方法研究的开题报告.docx
多目标下的船舶智能避碰方法研究的开题报告一、研究背景随着船舶的迅速发展,海上航行的安全问题日益引发人们的关注。尤其是当船舶在密集的航线中航行时,船舶之间的避碰问题成为至关重要的关键因素。船舶避碰的复杂性在于多个船舶同时行驶在相同的水域中,每艘船舶的动态状态和运动轨迹都是随时变化的。这需要船舶智能化技术来解决,保证海上交通的安全和顺畅。因此,多目标下的船舶智能避碰方法研究具有非常重要的现实意义。二、研究目的本研究旨在研究多目标下的船舶智能避碰方法,解决现有避碰技术的局限性和不足之处,提出更加精准、高效的避碰

基于信息融合的无人水面艇避碰控制研究的开题报告.docx
基于信息融合的无人水面艇避碰控制研究的开题报告一、选题背景随着无人水面艇技术的不断发展,其在海洋勘探、水下目标探测、海上巡逻等方面得到广泛应用。然而,无人水面艇在自主避碰方面仍存在一定的技术瓶颈,需要通过信息融合技术来提高其避碰效能。二、选题意义(1)实现无人水面艇自主避碰,提高水面艇运行的安全性和稳定性。通过信息融合技术的应用,可以实现不同传感器之间信息的融合与处理,从而让无人水面艇更加精确地感知周围环境,进一步提高机器人的自主避碰能力。(2)推动智慧海洋建设。随着人类对海洋资源的需求不断增长,智慧海洋

互见中基于船舶领域的狭水道避碰决策研究的开题报告.docx
互见中基于船舶领域的狭水道避碰决策研究的开题报告一、选题背景和研究意义跨越狭水道航行是船舶领域的一项极具挑战性和危险性的任务。由于狭水道的宽度狭窄、弯曲程度大且水流湍急,所以狭水道航行时遇到其他船舶的情况较为常见,如何进行避碰决策成为关键。目前,狭水道航行领域的避碰问题还没有得到很好的解决。通过研究船舶避碰决策算法,在航行中确保船舶的安全性和有效性,可以提高狭水道航行的效率和安全性,最大限度地减少避免碰撞的概率。同时,研究船舶避碰决策算法还可以为狭水道智能巡航提供技术支持。本研究将以狭水道为研究对象,以船