
定位方法、装置和车辆.pdf

瀚玥****魔王

1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

定位方法、装置和车辆.pdf
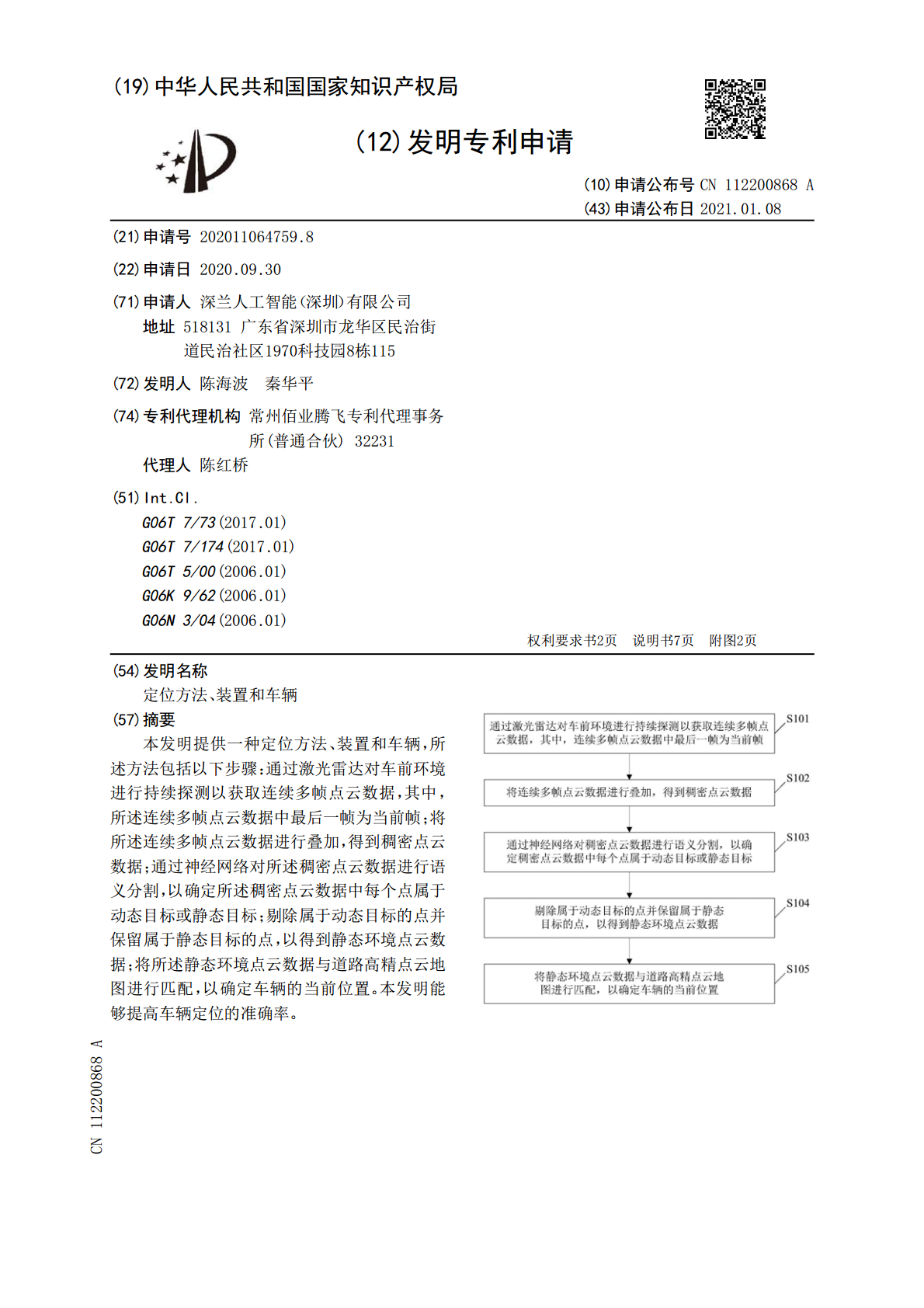
本发明提供一种定位方法、装置和车辆,所述方法包括以下步骤:通过激光雷达对车前环境进行持续探测以获取连续多帧点云数据,其中,所述连续多帧点云数据中最后一帧为当前帧;将所述连续多帧点云数据进行叠加,得到稠密点云数据;通过神经网络对所述稠密点云数据进行语义分割,以确定所述稠密点云数据中每个点属于动态目标或静态目标;剔除属于动态目标的点并保留属于静态目标的点,以得到静态环境点云数据;将所述静态环境点云数据与道路高精点云地图进行匹配,以确定车辆的当前位置。本发明能够提高车辆定位的准确率。
车辆定位方法、装置和系统.pdf
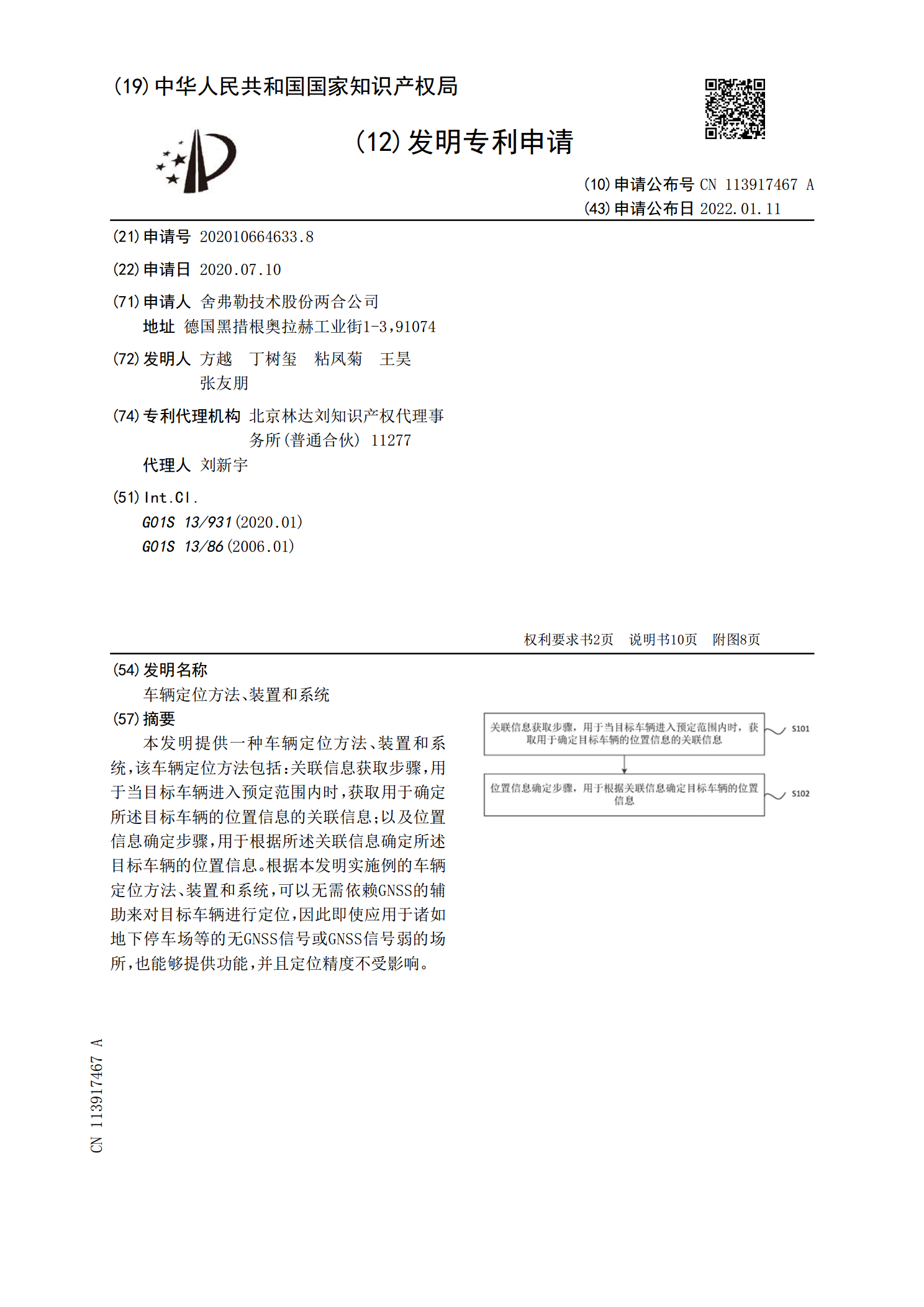
本发明提供一种车辆定位方法、装置和系统,该车辆定位方法包括:关联信息获取步骤,用于当目标车辆进入预定范围内时,获取用于确定所述目标车辆的位置信息的关联信息;以及位置信息确定步骤,用于根据所述关联信息确定所述目标车辆的位置信息。根据本发明实施例的车辆定位方法、装置和系统,可以无需依赖GNSS的辅助来对目标车辆进行定位,因此即使应用于诸如地下停车场等的无GNSS信号或GNSS信号弱的场所,也能够提供功能,并且定位精度不受影响。

车辆定位方法、装置及车辆.pdf
本公开涉及一种车辆定位方法,该方法包括:获取目标车辆在第一时刻的第一感知信息;获取关联车辆提供的对应于所述第一时刻的第二感知信息;根据所述第一感知信息和所述第二感知信息,获得所述目标车辆在所述第一时刻在地图中的位置数据;其中,所述关联车辆为与所述目标车辆之间满足预设的关联条件的车辆,所述第一感知信息为所述目标车辆对周边环境的感知信息,所述第二感知信息为所述关联车辆对周边环境的感知信息。该方法可以稳定、准确的获得目标车辆在地图中的位置数据。
车辆定位方法、装置及车辆.pdf
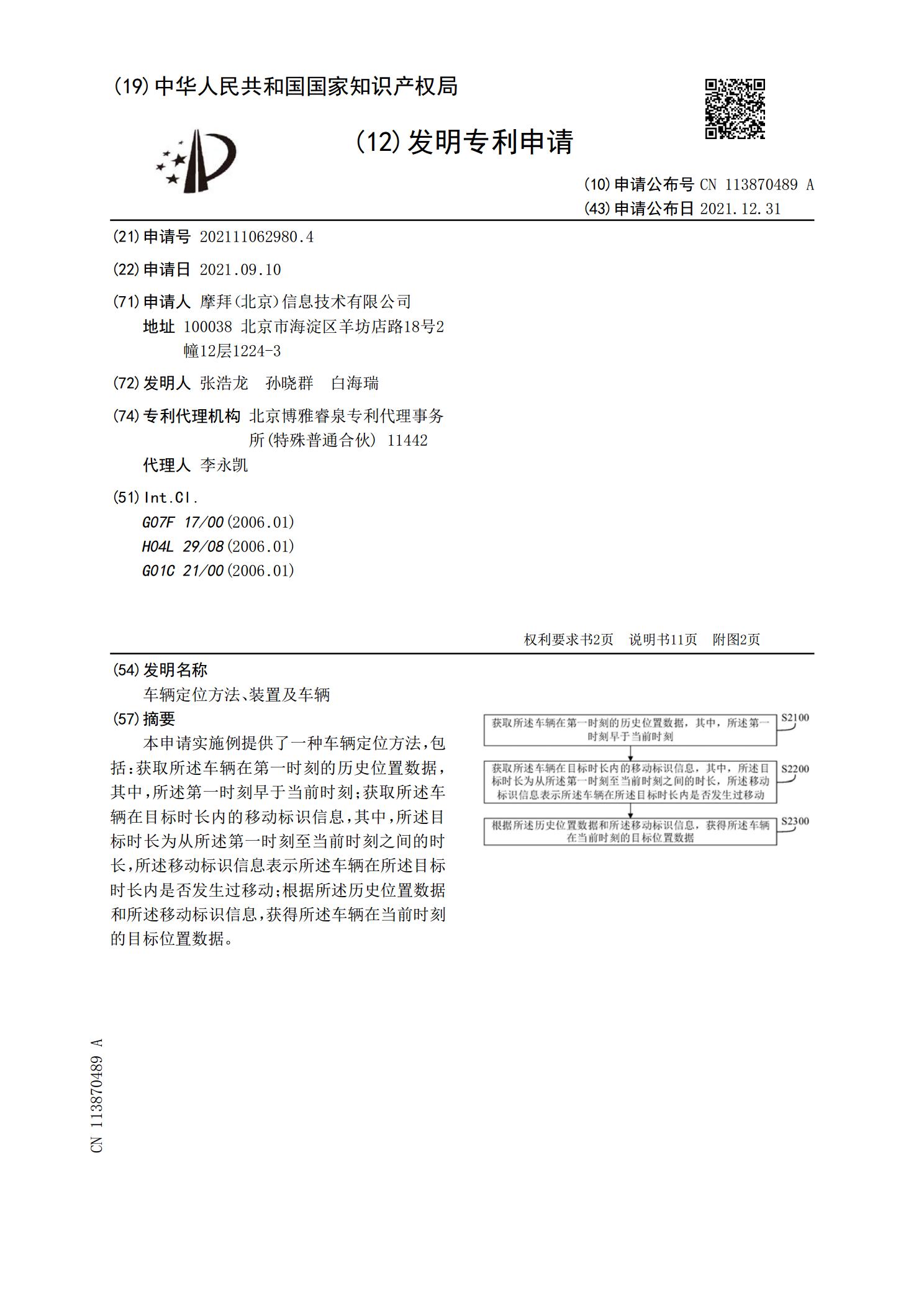
本申请实施例提供了一种车辆定位方法,包括:获取所述车辆在第一时刻的历史位置数据,其中,所述第一时刻早于当前时刻;获取所述车辆在目标时长内的移动标识信息,其中,所述目标时长为从所述第一时刻至当前时刻之间的时长,所述移动标识信息表示所述车辆在所述目标时长内是否发生过移动;根据所述历史位置数据和所述移动标识信息,获得所述车辆在当前时刻的目标位置数据。
车辆定位方法及装置.pdf
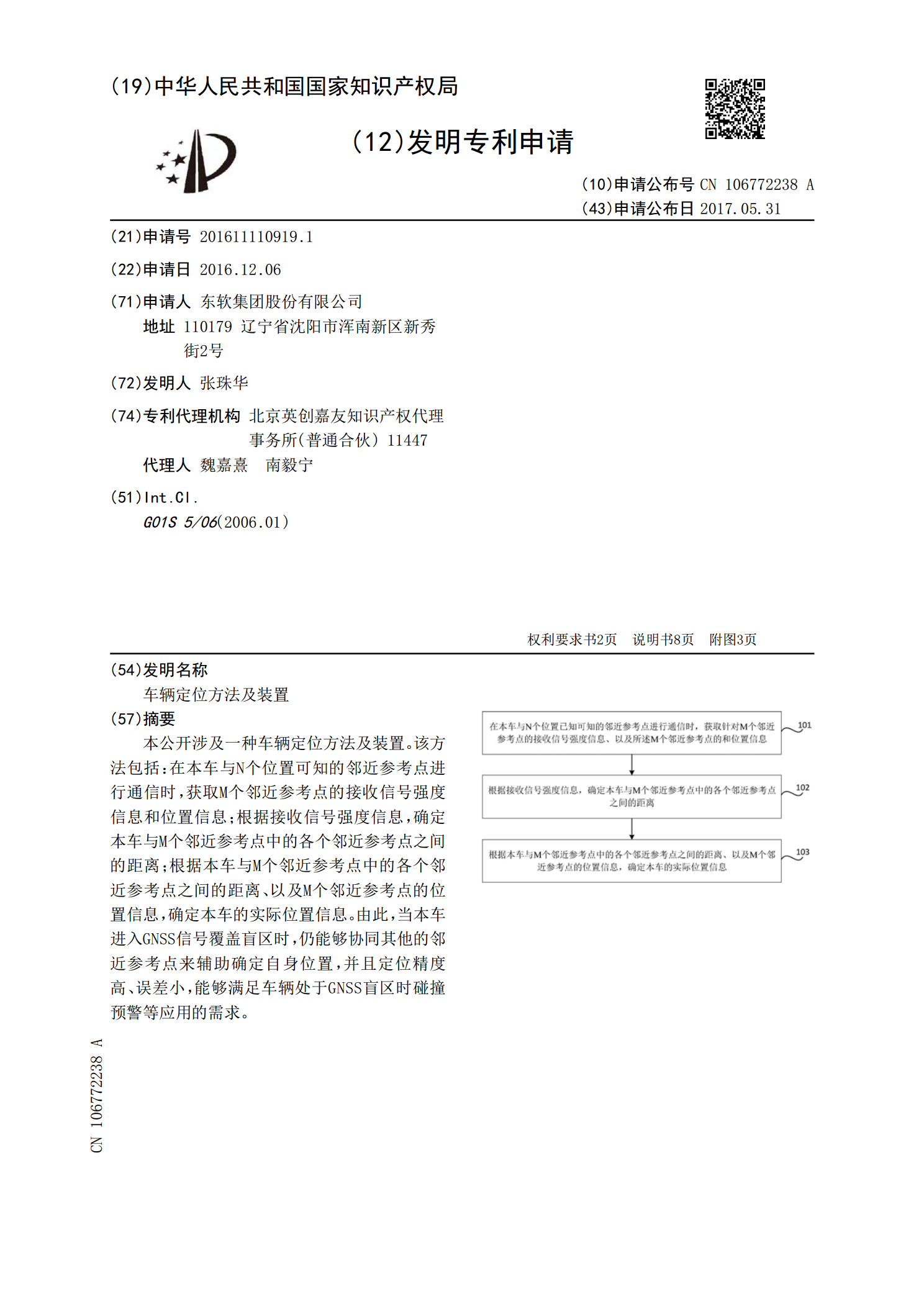
本公开涉及一种车辆定位方法及装置。该方法包括:在本车与N个位置可知的邻近参考点进行通信时,获取M个邻近参考点的接收信号强度信息和位置信息;根据接收信号强度信息,确定本车与M个邻近参考点中的各个邻近参考点之间的距离;根据本车与M个邻近参考点中的各个邻近参考点之间的距离、以及M个邻近参考点的位置信息,确定本车的实际位置信息。由此,当本车进入GNSS信号覆盖盲区时,仍能够协同其他的邻近参考点来辅助确定自身位置,并且定位精度高、误差小,能够满足车辆处于GNSS盲区时碰撞预警等应用的需求。