
一种基于激光雷达回波信号的改进型组合降噪方法.pdf

沛芹****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于激光雷达回波信号的改进型组合降噪方法.pdf
本发明公开了一种基于激光雷达回波信号的改进型组合降噪方法,包括以下步骤:S1、经过激光雷达探测器得到回波信号,采用高斯滤波方法降噪;S2、对滤波后的信号进行时域分析,进一步得到一维空间矩阵;S3、利用一维空间矩阵,对其进行奇异值分解;S4、根据获取信号特征,选取有用信号的重构子空间;S5、对重构子空间作奇异值分解逆变换,得到降噪信号。本发明解决了传统上单一化降噪方法中高斯滤波因选取模板和函数宽度的困扰而造成滤波后信号失真不准确等问题,同时解决了奇异值分解方法降噪的时间周期长问题,二者相互结合匹配大大降低了

一种基于参数优化VMD的激光雷达回波信号降噪方法.pdf
本发明公开了一种基于参数优化VMD的激光雷达回波信号降噪方法,首先将能量损失系数作为适应度函数,通过蝗虫优化算法(GOA)获取VMD算法的最优参数,并利用最优参数对带噪激光雷达回波信号进行VMD分解;之后应用豪斯多夫距离区分相关模态和非相关模态,采用小波去噪法进一步滤除相关模态中的高斯白噪声,并将相关模态重构得到降噪后的回波信号。本发明能有效避免模态混叠现象,在降噪的同时能保留原始信号中的有用信息,具有自适应性强、鲁棒性强和可靠性强等优点,能对激光雷达回波信号进行有效的降噪滤波处理。

基于激光雷达回波信号的车道线检测方法研究的中期报告.docx
基于激光雷达回波信号的车道线检测方法研究的中期报告一、研究背景车道线检测是自动驾驶和智能驾驶的一个重要研究方向。目前,常用的车道线检测方法主要包括基于图像处理的方法和基于激光雷达的方法。其中,基于激光雷达的方法更加适合在不良环境下稳定地进行车道线检测。二、研究内容本研究将探讨基于激光雷达回波信号的车道线检测方法,主要包括以下内容:1.激光雷达数据预处理:根据激光雷达测量原理和在路面上的安装位置,对激光雷达获取的点云数据进行预处理,如去除地面点、滤波处理等。2.车道线提取:基于点云数据进行车道线提取,主要包

基于EMD的激光雷达回波信号去噪方法研究的中期报告.docx
基于EMD的激光雷达回波信号去噪方法研究的中期报告第一部分:研究背景和意义激光雷达是一种重要的遥感技术,在三维建模、环境感知、无人驾驶等领域有着广泛的应用。然而,在实际应用中,激光雷达回波信号通常会受到噪声的影响,降低数据质量和分析准确性。因此,对激光雷达回波信号进行去噪处理具有重要意义。现有的去噪方法包括滤波、小波变换、稀疏表示等,但在去除噪声的同时也容易损失数据特征,影响目标识别和测量精度。因此,本研究选择基于经验模态分解的方法进行研究,该方法可以提取出信号中的局部频率信息,并能够有效地去除噪声。第二
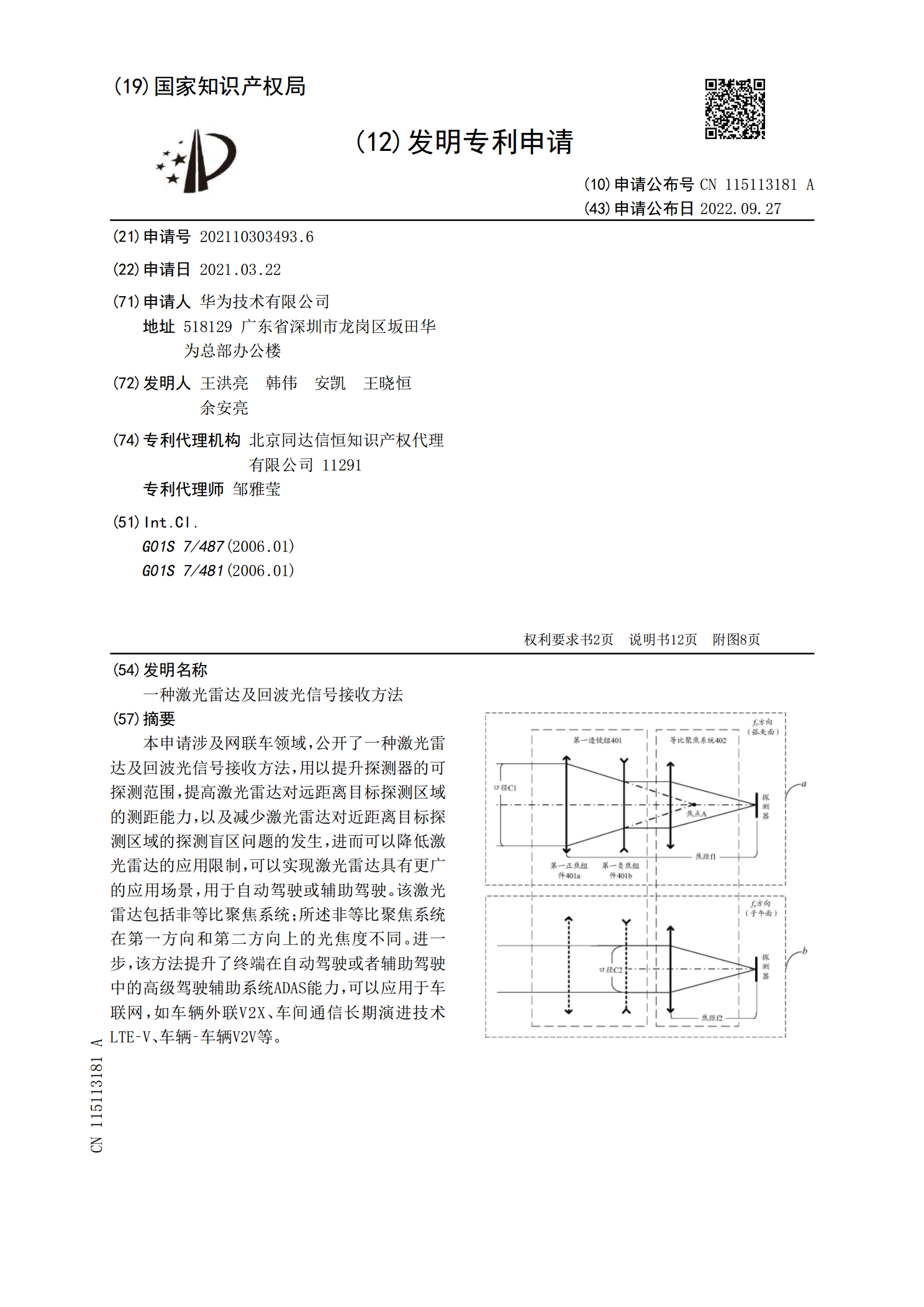
一种激光雷达及回波光信号接收方法.pdf
本申请涉及网联车领域,公开了一种激光雷达及回波光信号接收方法,用以提升探测器的可探测范围,提高激光雷达对远距离目标探测区域的测距能力,以及减少激光雷达对近距离目标探测区域的探测盲区问题的发生,进而可以降低激光雷达的应用限制,可以实现激光雷达具有更广的应用场景,用于自动驾驶或辅助驾驶。该激光雷达包括非等比聚焦系统;所述非等比聚焦系统在第一方向和第二方向上的光焦度不同。进一步,该方法提升了终端在自动驾驶或者辅助驾驶中的高级驾驶辅助系统ADAS能力,可以应用于车联网,如车辆外联V2X、车间通信长期演进技术LTE