
基于两自由度压电驱动快反镜的星光跟踪控制.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于两自由度压电驱动快反镜的星光跟踪控制.docx
基于两自由度压电驱动快反镜的星光跟踪控制基于两自由度压电驱动快反镜的星光跟踪控制摘要随着天文观测技术的不断发展,星光跟踪控制在天文学领域中变得越来越重要。本论文研究基于两自由度压电驱动快反镜的星光跟踪控制系统。首先介绍了星光跟踪的原理和意义,然后详细介绍了压电驱动快反镜的结构和特性。接着讨论了基于两自由度压电驱动快反镜的星光跟踪控制算法和控制系统设计,包括位置控制和角度控制两个方面。最后,通过实验验证了该控制系统的有效性和准确性。关键词:星光跟踪;压电驱动快反镜;位置控制;角度控制引言星光跟踪是一项重要的
一种基于压电纤维作动的快反镜.pdf
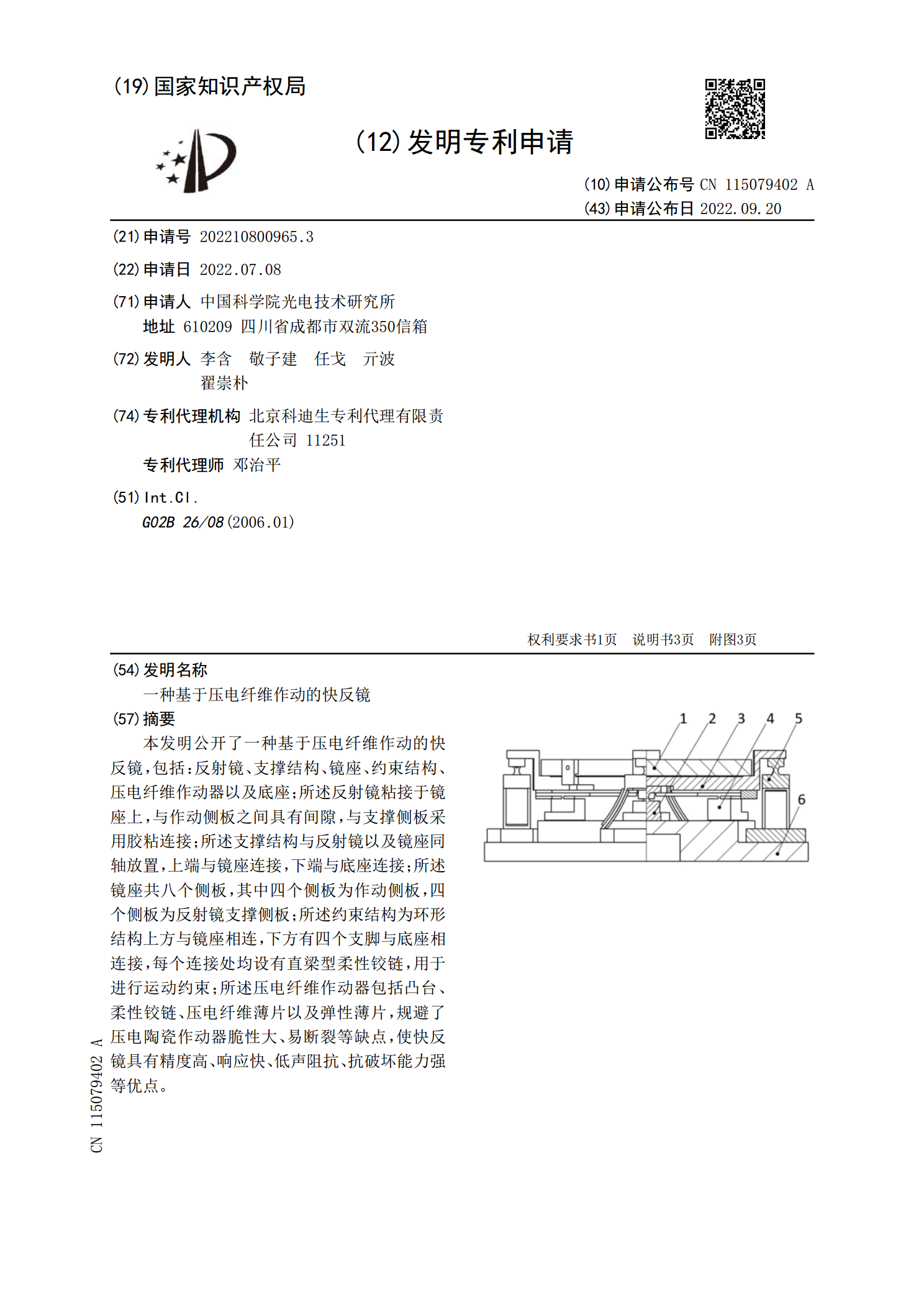
本发明公开了一种基于压电纤维作动的快反镜,包括:反射镜、支撑结构、镜座、约束结构、压电纤维作动器以及底座;所述反射镜粘接于镜座上,与作动侧板之间具有间隙,与支撑侧板采用胶粘连接;所述支撑结构与反射镜以及镜座同轴放置,上端与镜座连接,下端与底座连接;所述镜座共八个侧板,其中四个侧板为作动侧板,四个侧板为反射镜支撑侧板;所述约束结构为环形结构上方与镜座相连,下方有四个支脚与底座相连接,每个连接处均设有直梁型柔性铰链,用于进行运动约束;所述压电纤维作动器包括凸台、柔性铰链、压电纤维薄片以及弹性薄片,规避了压电陶
基于压电驱动的集成式两自由度步进执行器.pdf
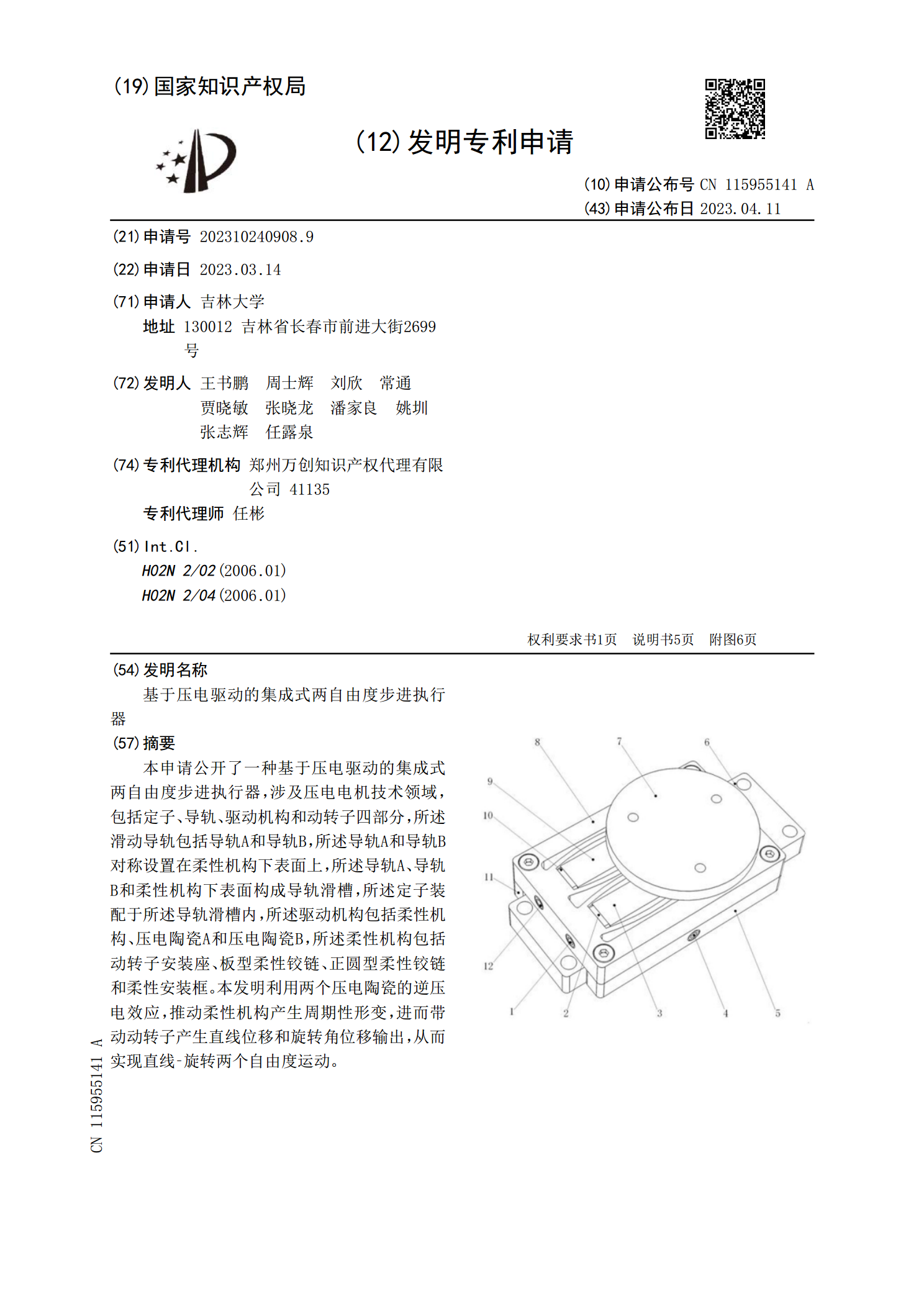
本申请公开了一种基于压电驱动的集成式两自由度步进执行器,涉及压电电机技术领域,包括定子、导轨、驱动机构和动转子四部分,所述滑动导轨包括导轨A和导轨B,所述导轨A和导轨B对称设置在柔性机构下表面上,所述导轨A、导轨B和柔性机构下表面构成导轨滑槽,所述定子装配于所述导轨滑槽内,所述驱动机构包括柔性机构、压电陶瓷A和压电陶瓷B,所述柔性机构包括动转子安装座、板型柔性铰链、正圆型柔性铰链和柔性安装框。本发明利用两个压电陶瓷的逆压电效应,推动柔性机构产生周期性形变,进而带动动转子产生直线位移和旋转角位移输出,从而实

基于压电陶瓷的快速反射镜驱动与控制研究.docx
基于压电陶瓷的快速反射镜驱动与控制研究随着科技的不断进步,快速反射镜的发展也越来越引人注目。借助于快速反射镜,我们可以对光的运动进行精确控制,从而在诸如激光雷达、星座测量和成像等领域中实现更高的精度和性能。本文就基于压电陶瓷的快速反射镜的驱动与控制进行研究。压电陶瓷具有极佳的机械和电学性能,是制作快速反射镜的最佳材料之一。利用压电陶瓷的性质,在外加电压的作用下,可以使其产生微小的形变,从而实现快速反射镜的运动。快速反射镜的驱动有两种常见方法,一种是使用压电陶瓷直接作为驱动器件,另一种是使用驱动电路对压电陶

两自由度压电惯性驱动管道机器人.pdf
本发明涉及一种两自由度压电惯性驱动管道机器人,其包括第一主体、第二主体、柔性连接板、板簧片、压电堆、支撑足、压电振子组件和压电微型注射器,柔性连接板的第一端与第一主体连接,且其第二端通过调节螺栓与板簧片的第一端固定连接,板簧片的第二端上部设有摩擦球,压电堆的第一端和第二端分别与第二主体和柔性连接板连接,支撑足的第一端和第二端分别通过第一螺栓和第二螺栓与第一主体以及第二主体连接,且压电振子设于第一主体上,压电微型注射器设于第二主体上。本发明的管道机器人结构简单,可以在管道内实现多自由度运动,并且第一主体和第